### 西门子_FM354 快速入门知识点总结
#### 一、模板概述
- **产品定位**:FM354是一款专为高速机械设备设计的定位模板,能够实现精准的位置控制,适用于复杂的运动模式及高精度要求的场景。
- **应用范围**:广泛应用于进给轴、调整轴、设定轴以及传送带式轴(直线轴、旋转轴)等的定位控制。
- **工作原理**:
- FM354通过模拟驱动接口(-10到+10V)来控制驱动器。
- 编码器(SSI或增量型)反馈轴的实际位置,FM354根据这些信息调整输出电压,实现精确的位置控制。
- **功能特性**:
- 支持手动调整、增量方式、MDI手动数据输入、运行中的MDI等功能。
- 可以实现自动/单段控制,适用于连续/周期性进给等复杂路径的伺服定位。
#### 二、所需软硬件准备
为了顺利安装和调试FM354模板,需要以下硬件和软件:
- **硬件**:
- FM354模块:用于伺服电机定位的核心组件。
- 20针前连接器:用于FM354模块与其他组件的连接。
- SIMODRIVE 611:作为伺服电机的功率驱动器。
- 伺服电机及其配套:需要与SIMODRIVE 611相匹配。
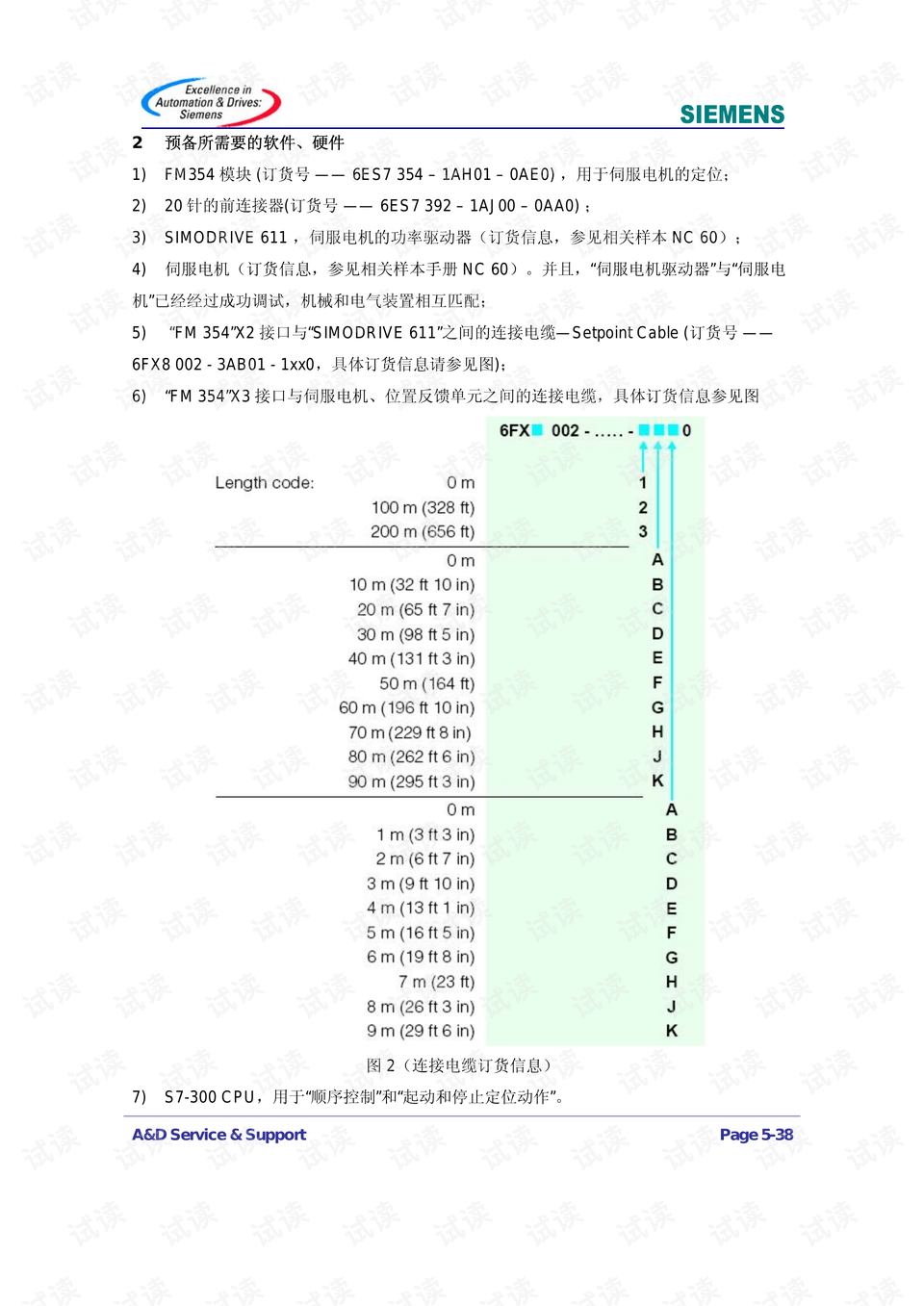
- 连接电缆:用于连接FM354与SIMODRIVE 611以及位置反馈编码器。
- S7-300 CPU:负责“顺序控制”和“启动/停止定位动作”的控制逻辑。
- 电源模块及相关配件。
- **软件**:
- STEP 7编程软件(V3.1或更高版本):用于编写PLC程序。
- FM354组态软件:用于设置模板参数。
- 操作面板或人机界面:用于显示状态信息和故障诊断。
#### 三、输入输出接口说明
FM354拥有X1、X2、X3三个端口,分别用于不同的功能:
- **X1端口**:数字量输入输出接口,用于连接外部开关信号和指示灯等。
- DI1-DI4:数字量输入端口,用于接收外部开关信号。
- DO1-DO4:数字量输出端口,用于控制外部指示灯或其他设备。
- RM_P/RM_N:快速测量输入端口,用于实现快速定位和测量功能。
- **X2端口**:与SIMODRIVE 611驱动器的接口,通过该端口传递控制信号和接收反馈信号。
- **X3端口**:与位置反馈编码器的接口,用于获取轴的实际位置信息。
#### 四、安装与接线步骤
- **硬件安装**:确保所有硬件按照正确的顺序和方式安装。
- **接线**:根据提供的接线图正确连接各部件之间的连线。
#### 五、软件配置
- **安装配置软件**:使用FM354的组态软件设置模板参数。
- **参数配置**:根据具体的使用需求,合理配置模板的各项参数。
#### 六、初步调试
- **启动调试**:按照说明书指引进行初步的调试操作。
- **故障排除**:如果遇到问题,应参考相关文档进行故障排查。
#### 七、程序编制
- **编程**:使用STEP 7软件编写控制程序,实现所需的控制逻辑。
通过以上步骤,可以完成FM354模板的基本安装、配置和调试,为后续的开发和应用打下坚实的基础。用户应仔细阅读相关文档,并结合实践经验,不断深入理解和掌握FM354模板的功能与使用方法。