









































Unidad IV-ProgramaciónDinámica-VersiónFinal.pptx
- 1. Universidad Veracruzana Facultad de Contaduría y Administración Campus Coatzacoalcos Programa Educativo: Administración Experiencia Educativa: Métodos Cuantitativos Presenta: M.C. Eunice Morales Reyes
- 3. Programación dinámica La programación dinámica es una técnica desarrollada por el matemático Richard Bellman en la década de 1950. La programación dinámica es una técnica para resolver problemas complejos dividiéndolos en subproblemas más pequeños, resolviendo cada uno una sola vez, y almacenando sus soluciones para no volver a calcularlas. Se usa especialmente cuando un problema tiene: • Subproblemas superpuestos (es decir, los mismos subproblemas se repiten muchas veces). • Estructura óptima (la mejor solución global se construye a partir de soluciones óptimas de los subproblemas).
- 4. Principios Básicos • Richard Bellman, principio de optimidad: “Una política óptima tiene la propiedad de que cualquiera que sea el estado inicial y la decisión inicial, las decisiones restantes deben constituir una política óptima con respecto al estado resultante de la primera decisión.” (Véase Bellman, 1957, Cap. III.3.) A M N O Z SO St t=0 t=T
- 5. De manera resumida… Imagina que estás en un laberinto y quieres llegar al tesoro. Para llegar, tienes que tomar varios caminos. El mejor camino no solo es el primero que tomas, sino que cada paso que des después también debe ser el mejor desde donde estés. Aunque cambies de lugar, tienes que seguir eligiendo los mejores caminos para llegar al tesoro más rápido o sin perderte. 🔁 En pocas palabras: "Si quieres hacer lo mejor desde el principio, también tienes que hacer lo mejor en cada parte del camino." Una buena decisión al principio no sirve de nada si después no seguimos tomando buenas decisiones.
- 6. Principio matemático de la descomposición Supongamos que para los Instantes to y tn, la información de un sistema se puede expresar en So como un vector inicial y Sn como un vector que representa el estado final. Fn SO Sn tO tn ✅ Eso significa: • En el tiempo t₀, tenemos un punto de partida: el estado inicial del sistema (llamado S₀). • En el tiempo tₙ, tenemos el punto de llegada: el estado final (llamado Sₙ). • Ambos estados se pueden representar con vectores (como una lista de números que describen al sistema en ese momento).
- 7. Principio matemático de la descomposición f1 f2 fn-1 fn . . . Por tanto: Sn = fn (fn-1 ( ……….. (f2 (f1 (SO ) ……….)) Es decir que el resultado de Sn del sistema no es nada más que una composición de funciones interrelacionadas y conocidas de la entrada SO .
- 8. Aplicaciones • Problema de ruta más corta • Asignación de recursos • Determinación de políticas de inventarios • Operación de reservaciones • Selección de inversiones • Determinación de políticas de expansión de capacidad
- 9. Problema de Ruta más corta Programación Dinámica
- 10. Relación recursiva hacia atrás Es importante definir: • i = etapas • Xi = estados de la etapa i (nodos) • d(xi, xi+1) = distancia o costos del nodo xi al nodo xi+1 • fi (xi ) = distancia más corta o costo más pequeño en la etapa i Definición de la ecuación recursiva: fi (xi ) = Minimizar {d(xi, xi+1) +fi+1(xi+1)} Proceso de retroceder desde el estado actual hacia el estado inicial tomando las decisiones óptimas en cada etapa y considerando cómo llegar a este estado actual desde el estado anterior de manera óptima.
- 11. Ejemplo 1: El problema de la diligencia (Prof. Harvey M Wagner) “Un cazafortunas mítico de Missouri que decide ir al oeste a sumergirse en la fiebre del oro que surgió en California a mediados del siglo XIX. Tiene que hacer el viaje en diligencia a través de territorios sin ley, donde existen serios peligros de ser atacado por merodeadores. A pesar de que su punto de partida y su destino son fijos, tiene muchas opciones en cuanto a qué estados – o territorios – debe elegir como puntos intermedios. Para lograr el viaje se requieren de 4 etapas para ir desde el estado A, a su destino en el estado J, este cazafortunas es un hombre prudente preocupado por su seguridad. Después de reflexionar un poco ideó una manera bastante ingeniosa para determinar la ruta más segura. Se ofrecen pólizas de seguros de vida a los pasajeros. Como el costo de la póliza de cualquier jornada en la diligencia está basado en una evaluación cuidadosa de la seguridad del recorrida, la ruta más segura debe ser aquella cuya póliza represente el menor costo total” ¿Cuál es la ruta que minimiza el costo total de la póliza ? 7 A B C D E F G H I J 2 4 3 4 6 3 2 4 4 1 5 1 4 6 3 3 3 3 4 Missouri California
- 12. Ejemplo 1: El problema de la diligencia 7 B C D E F G H I J 4 6 3 2 4 4 1 5 1 4 6 3 3 3 3 4 California Descomponer el problema en etapas A 2 4 3 Missouri B C D H I E F G Primera etapa Segunda etapa Tercera etapa Cuarta etapa 𝑋1 𝑋2 𝑋3 𝑋4 𝑋5
- 13. Ejemplo 1: El problema de la diligencia J 3 4 California Solucionar cada etapa: H I La idea general para calcular la ruta más corta es calcular los costos acumulativos más pequeños a todos los nodos terminales de una etapa, y luego utilizarlos como dato de entrada a la etapa subsiguiente. Para este caso se empleará el desarrollo del problema con un recorrido hacia atrás. Cuando el cazafortunas tiene una sola etapa por recorrer (i=4), su ruta de ahí en adelante esta perfectamente determinada por su estado actual (ya sea H o I) y su destino final, x5 = J. x5 = J está conectado a H o I(x4 = H o I) Cuarta etapa x4 c(x4,x5) Solución óptima x5= J f4(x4) x5 * H 3 3 J I 4 4 J 3 4 𝑋4 𝑋5
- 14. Ejemplo 1: El problema de la diligencia H I 1 4 6 3 3 3 E F G Tercera etapa 3 4 La Etapa 3 tiene dos nodos terminales (H e I). x4 = H está conectado a E,F,G (x3 = E,F y G) x4 = I está conectado a E,F,G (x3 = E,F y G) Solucionar cada etapa: X3 c(x3,x4) + f4(x4) Solución óptima x4= H x4= I f3(x3) x4 * E 1+3=4 4+4=8 4 H F 6+3=9 3+4=7 7 I G 3+3=6 3+4=7 6 H 𝑋3 𝑋4
- 15. Ejemplo 1: El problema de la diligencia La Etapa 2 tiene tres nodos terminales (E,F y G). x3 = E está conectado a B,C y D (x2 = B,C y D) x3 = F está conectado a B,C y D (x2 = B,C y D) x3 = G está conectado a B,C y D (x2 = B,C y D) Solucionar cada etapa: 7 B C D E F G 4 6 3 2 4 4 1 5 Segunda etapa 4 7 6 X2 c(x2,x3) + f3(x3) Solución óptima x3= E x3= F x3= G f2(x2) x3 * B 7+4=11 4+7=11 6+6=12 11 E,F C 3+4=7 2+7=9 4+6=10 7 E D 4+4=8 1+7=8 5+6=11 8 E,F 𝑋2 𝑋3
- 16. Ejemplo 1: El problema de la diligencia A 2 4 3 Missouri B C D La Etapa 1 tiene tres nodos terminales (B,C y D). x2 = B está conectado a A (x1 = A) x2 = C está conectado a A (x1 = A) x2 = D está conectado a A (x1 = A) X1 c(x1,x2) + f2(x2) Solución óptima x2= B x2= C x2= D f1(x1) x2 * A 2+11=13 4+7=11 3+8=11 11 C o D Solucionar cada etapa: Primera etapa 11 7 8 SOLUCIÓN Para gastar 11 dólares como costo total de la póliza se debe tomar el o los siguiente(s) camino(s): A A C D E H J E H J F I J A D 𝑋1 𝑋2
- 17. Ejemplo 2: Problema de ruta más corta resuelto mediante programación dinámica Suponga que se desea seleccionar la ruta por carretera más corta entre dos ciudades. La red que se muestra en la figura proporciona las posibles rutas entre la ciudad de inicio en el nodo A y la ciudad de destino en el nodo G. ¿Cuál es la ruta que minimiza la distancia entre las dos ciudades? 12 A B C D E F G 7 8 5 8 9 7 13 9 6 Inicio Final Nota: Distancia en km 𝑋1 𝑋2 𝑋3 𝑋4
- 18. Ejemplo 2: Problema de ruta más corta resuelto mediante programación dinámica: Solución Descomponer el problema en etapas Primera etapa Segunda etapa Tercera etapa E F G 9 6 Final A B C D 7 8 5 Inicio 12 8 9 7 13 E F B C D 𝑋1 𝑋2 𝑋3 𝑋4
- 19. Ejemplo 2: Problema de ruta más corta resuelto mediante programación dinámica: Solución Solucionar cada etapa: La idea general para calcular la ruta más corta es calcular la distancia acumulativa más corta a todos los nodos terminales de una etapa, y luego utilizarlos como dato de entrada a la etapa subsiguiente. Para este caso se empleará el desarrollo del problema con un recorrido hacia atrás. x4 = G está conectado a E o F(x3 = E o F) exactamente con una ruta cada uno x3 d(x3 , x4) Solución óptima x4= G f3(x3) x4 * E 9 9 G F 6 6 G Tercera etapa E F G 9 6 Final 9 6 𝑋3 𝑋4
- 20. Ejemplo 2: El problema de la diligencia La Etapa 2 tiene dos nodos terminales (E y F). x3 = E está conectado a B,C y D (x2 = B,C y D) x3 = F está conectado a C y D (x2 = C y D) Solucionar cada etapa: X2 d(x2,x3) + f2(x2) Solución óptima x3= E x3= F f2(x2) x3 * B 12+9=21 ---- 21 E C 8+9=17 9+6=15 15 F D 7+9=16 13+6=19 16 E Segunda etapa 12 8 9 7 13 E F B C D 9 6 𝑋2 𝑋3
- 21. Ejemplo 2: El problema de la diligencia La Etapa 1 tiene tres nodos terminales (B,C y D). x2 = B está conectado a A (x1 = A) x2 = C está conectado a A (x1 = A) x2 = D está conectado a A (x1 = A) X1 d(x1,x2) + f2(x2) Solución óptima x2= B x2= C x2= D f1(x1) x2 * A 7+21=28 8+15=23 5+16=21 21 D Solucionar cada etapa: Primera etapa SOLUCIÓN Para recorrer una distancia de 21 km se debe tomar el o los siguiente(s) camino(s): A D E G A B C D 7 8 5 Inicio 21 15 16 𝑋1 𝑋2
- 22. Ejercicio 1: Ruta más corta – Programación dinámica Se trata de distribuir un producto de la ciudad A, a la ciudad M pasando por los puntos intermedios K, T, L,.........,B. Las distancias en kilómetros se muestran en la figura a continuación. Se trata de minimizar la distancia total, hallando la ruta más corta entre A y M. 12 A L K J T R B M 15 16 14 16 14 17 14 11 24 17 16 19 Inicio Final
- 23. Ejercicio 2: Ruta más corta– Programación dinámica Se trata de distribuir los productos de la ciudad A, a la ciudad G, con el objetivo de disminuir los gastos de transporte de la Empresa “Bimbo S.A. de C.V.” El costo en pesos del traslado entre las diversas ciudades se definen en la figura a continuación. ¿Cuál es la ruta y el costo mínimo que permita el traslado de productos de la empresa Bimbo de la ciudad A, a la G? 600 A B C D E F G 400 500 300 400 500 700 700 800 Inicio Final
- 25. Ejemplo 1: Modelo de la mochila (Knapsack problem) • El problema representa un problema de asignación de recursos general • El objetivo es determinar los artículos más valiosos que se pueden cargar en una mochila. • Se busca maximizar el rendimiento total. El problema general se representa como: Es importante definir: • W = peso máximo que soporta la mochila • mi = cantidad de unidades del articulo i • ri, = ingreso unitario del articulo i • wi = peso del articulo i Maximizar Z = r1m1 + r2m2 + … + rnmn Sujeto a = w1m1 + w2m2 + … + wnmn <= W m1, m2 , … mn enteros no negativos Función recursiva: •La etapa i está representada por el artículo i= 1, 2, … , n •Las alternativas en la etapa i son la cantidad de unidades del artículo i, mi = 0,1, …, •El rendimiento para m1 esr1m1 •El estado en la etapa i está representado por xi , el peso total asignado a las etapas (artículos) i , i + 1, … , y n. Esta definición reconoce que el límite de peso es la única restricción que liga a todas las n etapas. fi (xi ) = rendimiento máximo para las etapas i , i + 1, … , y n dado el estado xi fi (xi ) = Max {ri mi + fi+1(xi - wi mi )}, i= 1, 2, … , n
- 26. Ejemplo 1: Modelo de la mochila (Knapsack problem) • Un barco de 4 toneladas puede cargarse con uno o más de tres artículos. La siguiente tabla da el peso unitario en toneladas y el ingreso unitario en miles de pesos, para el artículo i. El objetivo es determinar la cantidad de unidades de cada artículo que maximizará el rendimiento total. Artículo i Peso unitario wi (toneladas) Ingreso unitario ri (miles de $) 1 2 31 2 3 47 3 1 14
- 27. Ejemplo 1: Modelo de la mochila (Knapsack problem) – Solución mi fi (xi ) = Max {ri mi + fi+1(xi - wi mi )} f3 (x3 ) = Max {14 m3} m3 = 0, 1, 2,3,4 m3= = 4 x3 14 m3 Solución Óptima m3 = 0 m3 = 1 m3 = 2 m3 = 3 m3 = 4 f3 (x3 ) m3 0 0 - - - - 0 0 1 0 14 - - - 14 1 2 0 14 28 - - 28 2 3 0 14 28 42 - 42 3 4 0 14 28 42 56 56 4
- 28. Ejemplo 1: Modelo de la mochila (Knapsack problem) – Solución mi fi (xi ) = Max {ri mi + fi+1(xi - wi mi )} f2 (x2 ) = Max {47 m2} + f3(x2 –w2m2 )} m2= = 1 m2 = 0, 1 x2 f2 (x2 ) = Max {47 m2} + f3(x2 –3m2 )} Solución Óptima m2 = 0 m2 = 1 f2 (x2 ) m2 0 {47 m2 + f3(x2 –3m2 )} 47(0) + f3(0 –3(0)) 0 + 0 = 0 - 0 0 1 0 + 14 = 14 - 14 0 2 0 + 28 = 28 - 28 0 3 0 + 42 = 42 47 + 0 = 47 47 1 4 0 + 56 = 56 47 + 14 = 61 61 1
- 29. Ejemplo 1: Modelo de la mochila (Knapsack problem) – Solución mi fi (xi ) = Max {ri mi + fi+1(xi - wi mi )} f1 (x1 ) = Max {31 m1 + f2(x1 –w1m1)} m1= = 2 m1 = 0, 1, 2 x1 f1 (x1 ) = Max {31 m1} + f2(x1 –2m1)} Solución Óptima m1 = 0 m1 = 1 m1 = 2 f1 (x1 ) m1 0 31 m1 + f2(x1 –2m1) 31(0) + f2(0 –2(0)) 0 + 0 = 0 - - 0 0 1 0 + 14 = 14 - - 14 0 2 0 + 28 = 28 31 + 0 = 31 - 31 1 3 0 + 47 = 47 31 + 14 = 45 - 47 0 4 0 + 61 = 61 31 + 28 = 59 62 + 0 = 62 62 2 Por lo tanto, la solución óptima es que el barco cargue dos unidades del artículo 1, y cero unidades del artículo 2 y 3. El rendimiento asociado es de $ 62,000
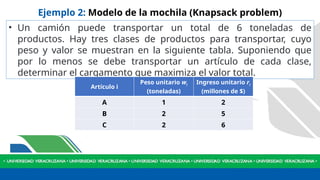
- 30. Ejemplo 2: Modelo de la mochila (Knapsack problem) • Un camión puede transportar un total de 6 toneladas de productos. Hay tres clases de productos para transportar, cuyo peso y valor se muestran en la siguiente tabla. Suponiendo que por lo menos se debe transportar un artículo de cada clase, determinar el cargamento que maximiza el valor total. Artículo i Peso unitario wi (toneladas) Ingreso unitario ri (millones de $) A 1 2 B 2 5 C 2 6
- 31. Ejercicio 1: Modelo de la mochila (Knapsack problem) • Una empresa desea enviar un paquete a un cliente en otra Ciudad. Hay cuatro artículos que desea enviar, pero entre todos sobrepasan los 5 kilogramos que considera puede cargar. El peso y valor de cada artículo se muestran en la siguiente tabla Artículo i Peso unitario wi (Kg) Valor del articulo Pesos A 2 $300 B 3 $400 C 4 $500 D 5 $600 ¿Qué artículos tendría que llevar para que el valor del paquete sea máximo?
- 32. Ejercicio 2: Modelo de la mochila (Knapsack problem) • Un camión puede transportar un total de 10 toneladas de productos. Hay tres clases de productos para transportar, cuyo peso y valor se muestran en la siguiente tabla. ¿Qué artículos se deben poner en la mochila para maximizar el valor total de la mochila? Artículo i Peso unitario wi (Toneladas) Valor del articulo Miles de Pesos A 3 $4 B 4 $5 C 5 $6
- 33. Ejemplo 2: Modelo de la mochila (Knapsack problem) • Un camión puede transportar un total de 6 toneladas de productos. Hay tres clases de productos para transportar, cuyo peso y valor se muestran en la siguiente tabla. Suponiendo que por lo menos se debe transportar un artículo de cada clase, determinar el cargamento que maximiza el valor total. Artículo i Peso unitario wi (toneladas) Ingreso unitario ri (millones de $) A 1 2 B 2 5 C 2 6
- 34. Ejemplo 3: Asignación de recursos humanos El gerente de ventas de una editorial de libros de texto universitarios tiene seis agentes de ventas que puede asignar a tres regiones distintas del país. Ha decidido que cada región debe tener por lo menos un agente y que cada uno de éstos debe quedar restringido a una de estas regiones, pero ahora quiere determinar cuántos agentes debe asignar a las respectivas regiones con el fin de maximizar las ventas. La tabla da el incremento estimado de las ventas en cada región (en las unidades apropiadas) si se le asignan diferentes cantidades de agentes. Utilice programación dinámica para resolver este problema, elabore las tablas normales con n=3, n=2 y n=1. Agente de Ventas Región 1 2 3 1 40 24 32 2 54 47 46 3 78 63 70 4 99 78 84
- 35. Tabla decisional de Programación Dinámica Regió n 1 Regió n 2 Regió n 3 d2 d3 d1 R3 R2 R1 n = 3 n = 2 n = 1 S3 = 6 S2 = S3 – d3 S1 = S2 – d2 S0 = S1 – d1 Restricciones >= 1 >= 1 >= 1
- 36. Tabla 1: Región 3 n= 1 d1 S1 32 46 70 84 f1* d1* 1 2 3 4 Min 1 32 - - - 32 1 2 32 46 - - 46 2 3 32 46 70 - 70 3 Max 4 32 46 70 84 84 4 Tabla 2: Región 2 n= 2 d2 S2 24 47 63 78 f2* d2* 1 2 3 4 Min 2 56 - - - 56 1 3 70 79 - - 79 2 4 94 93 95 - 95 3 Max 5 108 117 109 11 0 117 2 fk = Rx + f* k-1 Función recursiva = (Retorno o costo) + (Optimo de la etapa anterior) F(1,1) = 32 + 0 = 32 F(2,1) = 32 + 0 = 32 F(2,2) = 46 + 0 = 46 F(3,1) = 32 + 0 = 32 F(3,2) = 46 + 0 = 46 F(3,3) = 70 + 0 = 70 F(4,1) = 32 + 0 = 32 F(4,2) = 46 + 0 = 46 F(4,3) = 70 + 0 = 70 F(4,4) = 84 + 0 = 84 fk = Rx + f* k-1 Función recursiva = (Retorno o costo) + (Optimo de la etapa anterior) F(2,1) = 24 + 32 = 56 F(3,1) = 24 + 46 = 70 F(3,2) = 47 + 32 = 79 F(4,1) = 24 + 70 = 94 F(4,2) = 47 + 46 = 93 F(4,3) = 63 + 32 = 95 F(5,1) = 24 + 84 = 108 F(5,2) = 47 + 70 = 117 F(5,3) = 63 + 46 = 109 F(5,4) = 78 + 32 = 110 Sk-1 = Sk - dk Sk-1 = 2-1 = 1 E.A. Sk-1 = 3-1 = 2 E.A. Sk-1 = 3-2 = 1 E.A. Sk-1 = 4-1 = 1 E.A. Sk-1 = 4-2 = 2 E.A. Sk-1 = 4-3 = 1 E.A. Sk-1 = 5-1 = 4 E.A. Sk-1 = 5-2 = 3 E.A. Sk-1 = 5-3 = 2 E.A. Sk-1 = 5-4 = 1 E.A.
- 37. Tabla 3: Región 1 n= 3 d3 S3 40 54 78 99 f3* d1* 1 2 3 4 6 157 149 157 15 5 157 1,3 Tabla resumen Etapas Sk dk Sk-1 fk* 3 6 1 5 40 2 5 2 3 47 1 3 3 0 70 157 fk = Rx + f* k-1 Función recursiva = (Retorno o costo) + (Optimo de la etapa anterior) F(6,1) = 40 + 117= 157 F(6,2) = 54 + 95 = 149 F(6,3) = 78 + 79 = 157 F(6,4) = 99 + 56 = 155 Sk-1 = 6-1 = 5 E.A. Sk-1 = 6-2 = 4 E.A. Sk-1 = 6-3 = 3 E.A. Sk-1 = 6-4 = 2 E.A. Decisión: Región 1: 1 vendedor Región 2: 2 vendedores Región 3: 3 vendedores Sobran 0 Vendedores Ventas por 157 dólares Tabla resumen Etapas Sk dk Sk-1 fk* 3 6 3 3 78 2 3 2 1 47 1 1 1 0 32 157 Decisión: Región 1: 3 vendedores Región 2: 2 vendedores Región 1: 1 vendedor Sobran 0 Vendedores Ventas por 157 dólares f3* f3*
- 38. Ejemplo 4: Asignación de cargas a tiendas El propietario de una cadena de tres supermercados compró cinco cargas de fresas frescas. La distribución de Probabilidad estimada de las ventas potenciales de las fresas antes de que se echen a perder difiere entre los tres supermercados. El propietario quiere saber cómo debe asignar las cinco cargas a las tiendas para maximizar la ganancia esperada. Por razones administrativas, no quiere dividir las cargas entre las tiendas. Sin embargo, está de acuerdo en asignar cero cargas a cualquiera de ellas. En la siguiente tabla se proporciona la ganancia estimada de cada tienda al asignar distintas cantidades de cargas. Utilice programación dinámica para determinar cuántas cargas debe asignarse a cada tienda para maximizar la ganancia total esperada.
- 39. Tabla decisional de Programación Dinámica Tiend a 3 Tiend a 2 Tiend a 1 d2 d3 d1 R3 R2 R1 n = 3 n = 2 n = 1 S3 = 5 S2 = S3 – d3 S1 = S2 – d2 S0 = S1 – d1
- 40. Tabla 1: Tienda 1 n= 1 d1 S1 0 5 9 14 17 21 f1* d1 * 0 1 2 3 4 5 Min 0 0 - - - - - 0 0 1 0 5 - - - - 5 1 2 0 5 9 - - - 9 2 3 0 5 9 14 - - 14 3 4 0 5 9 14 17 - 17 4 Max 5 0 5 9 14 17 21 21 5 Tabla 2: Tienda 2 n= 2 d2 S2 0 6 11 15 19 22 f2* d2* 0 1 2 3 4 5 Min 0 0 - - - - - 0 0 1 5 6 - - - - 6 1 2 9 11 11 - - - 11 1,2 3 14 15 16 15 - - 16 2 4 17 20 20 20 19 - 20 1,2, 3 Max 5 21 23 25 24 24 22 25 2
- 41. Tabla 3: Tienda 3 n= 3 Tabla resumen Etapas Sk dk Sk-1 fk* 3 5 0 5 0 2 5 2 3 11 1 3 3 0 14 25 Decisión: Tienda 3: 0 cargas Tienda 2: 2 cargas Tienda 1: 3 cargas Sobran 0 cargas Ventas por 25 dólares Tabla resumen Etapas Sk dk Sk-1 fk* 3 5 2 3 9 2 3 2 1 11 1 1 1 0 5 25 Decisión: Tienda 3: 2 cargas Tienda 2: 2 cargas Tienda 1: 1 carga Sobran 0 cargas Ventas por 25 dólares f3* f3* d3 S3 0 4 9 13 18 20 f3* d3* 0 1 2 3 4 5 5 25 24 25 24 24 20 25 0,2
- 42. Conclusiones Frente a una serie de problemas cuyas soluciones pueden ser expresadas recursivamente en términos matemáticos, posiblemente la manera más natural de resolverlos es mediante un método recursivo. Sin embargo, el tiempo de ejecución de una solución, normalmente de orden exponencial, puede mejorarse mediante la programación dinámica. Para resolver un problema se pueden hacer muchas divisiones y obtener subproblemas independientes, de esta manera se puede llegar más fácil a la solución del problema original, sin embargo no todos los problemas se pueden resolver de esta forma, ya que cuando los subproblemas obtenidos no son independientes sino que existe solapamiento entre ellos, la solución no resulta ser eficiente por la repetición de cálculos que conlleva. En estos casos es cuando la programación dinámica ofrece una solución aceptable.
- 43. Referencias • Bronson, R. (1993). Investigación de operaciones, México, Editorial McGraw-Hill. • • Chediak, F. (2005). Investigación de operaciones, Colombia Ibagué, Editorial El Poira. • Izar, J.(2012). Investigación de operaciones, México, Editorial Trillas. • Roscoe, D.(1984). Modelos cuantitativos para administración, México, Editorial Iberoamérica. • Lieberman ,G.(2002). Investigación de operaciones. México, Editorial McGraw-Hill. • Taha, H.(2008). Investigación de operaciones, México, Editorial Alfaomega. • Winston, W. (2005). Investigación de operaciones, México, Editorial Thomson.