Programming A Robot Using
Download as PPTX, PDF3 likes1,627 views
This document discusses programming a robot using ICC AVR ver 7.5, including how to install and use the software to compile and build code. It also covers important microcontroller concepts like I/O ports, analog to digital conversion, and provides code examples for motion control, line following, and turning the buzzer and LED display on/off.
1 of 58
Downloaded 141 times



















![Port Drive Register, PORTn• For pins configured as input(DDRn[x] = 0) microcontroller connects ainternal pull up register if thecorresponding bit of PORTn is set• If the PORTn bit is cleared, pin is Tristated• DDRA = 0x00;• PORTA = 0xF0](https://image.slidesharecdn.com/programmingarobotusing-091029222810-phpapp02/85/Programming-A-Robot-Using-28-320.jpg)





![unsigned char ADC_conversion (unsigned char ADC_channel_number) { unsigned inti = 0; ADCH = 0x00;i = ADC_channel_number & 0x0F; // keeping the loweatnibbel ADMUX = i | 0x20; //upper nibbel of 0x20 indicates the result is left adjusted (8 bit ADC conversion) ADCSR |= 0x40; for (i = 1; i < 255; i++); //delay of 93.2 uSi = ADCH; return (i);}void main(void){ unsigned char I, value[3];; for(i=0;i<3;i++) { value[i]=ADC_conversion(i); }}](https://image.slidesharecdn.com/programmingarobotusing-091029222810-phpapp02/85/Programming-A-Robot-Using-35-320.jpg)



















![CODE FOR LINE FOLLOWERunsigned intADC_conversion (unsigned intADC_channel_number) { unsigned inti = 0; ADCH = 0x00;i = ADC_channel_number & 0x0F; // keeping the loweatnibbel ADMUX = i | 0x20; ADCSR |= 0x40; for (i = 1; i < 255; i++); //delay of 93.2 uSi = ADCH; return (i);}void forward(void){ PORTC=0xD8;}void left(void){ PORTC=0xB8;}void right(void){ PORTC=0xD4;}void backward(void){ PORTC=0xB4;} //void main(void){unsigned char value[3];unsigned char i;init_devices(); while(1) { for(i=0;i<3;i++) { value[i]=ADC_conversion(i); } if (value[1] < 50) { forward(); } else { if(value[2] > 90) {left(); } else { if (value[0] > 90) {right(); }else { backward();}} } } }](https://image.slidesharecdn.com/programmingarobotusing-091029222810-phpapp02/85/Programming-A-Robot-Using-57-320.jpg)

Ad
Recommended
Programming avr microcontroller digital i
Programming avr microcontroller digital iManas Mantri This document provides information on programming digital I/O for AVR microcontrollers in C. It discusses how to configure the DDR, PORT, and PIN registers to set pins as inputs or outputs. It gives an example of a program that continuously reads the logic values on port B and writes them to port C. It also shows a schematic and code for blinking 8 LEDs connected to an ATMega8515 microcontroller.
AVR programming - BASICS
AVR programming - BASICSRobotix 2011 The document discusses the features and input/output basics of the AVR ATmega16 microcontroller. Key points include its Harvard architecture, 8-bit design, timers, ADC, and protocol support. It describes compiler tools, programming hardware, and pin configuration registers like DDR, PORT, and PIN. The DDR register sets the pin directions, PORT is used for output and pull-up configuration, and PIN reads pin states. Pull-up resistors prevent floating inputs. An exercise demonstrates configuring ports for different I/O functions.
Controlling Motors for Robot
Controlling Motors for RobotVarad Manglekar The document discusses programming the motors of a bot to move it forward, backward, and make turns. It includes code snippets that set the data direction registers and port registers to control two motors to achieve different movements like forward, backward, slight right turn, and sharp left turn. The code uses delay functions to pause the motors between movements.
MPLABX with proteus
MPLABX with proteusJabez Winston This document provides information about Microchip Technology, a manufacturer of microcontrollers and analog semiconductors. It discusses Microchip's headquarters and wafer fabrication facilities. It also lists some of Microchip's main competitors in the semiconductor industry. Additionally, it gives an overview of Microchip's microcontroller architectures like PIC and some key variants. It then presents a problem about designing a circuit to turn on an LED based on voltage levels. It provides information about analog to digital converters and how they work. Finally, it discusses the PIC12F683 microcontroller and some of its analog to digital converter registers used to read voltage levels.
Lec12
Lec12siddu kadiwal The document discusses the programmable interface device 8155 and its applications. It describes the block diagram and address calculation of the 8155. It then discusses interfacing LEDs and generating square waves using the 8155 timer. It also covers the handshake and interrupt modes of the 8155 and interfacing an A/D converter using the handshake mode. The document provides code examples to initialize ports and display values on ports. It explains using the 8155 to read data from an A/D converter and display it on seven segment LEDs while recording the conversion time.
1203 Ppi 8155
1203 Ppi 8155techbed The document discusses the 8155 Programmable Interface Adapter chip. It can be used to interface I/O devices to a microprocessor like the 8085. The 8155 has programmable I/O ports, a timer, and memory. It is programmed by writing control words to its control register. An example is given of using an 8155 to read temperature data from an ADC and display it on LEDs using handshaking between the 8155 and ADC ports. Pseudocode is provided to initialize the 8155 ports and timer, trigger ADC conversions, read the temperature values, and continuously display updated values.
Picmico
Picmicologes91 The document discusses microcontrollers and the PIC16F877 microcontroller in particular. It provides the following key points:
- A microcontroller is a single-chip computer containing a processor, memory, and input/output peripherals. Microcontrollers can store and run user-written programs.
- The main parts of a microcontroller include a CPU, RAM, ROM, I/O lines, timers, and analog-to-digital and digital-to-analog converters.
- The PIC16F877 is chosen for its low cost, reliability, ease of use, and ability to perform a wide range of tasks using C language software.
Embedded system (Chapter 3) io_port_programming
Embedded system (Chapter 3) io_port_programmingIkhwan_Fakrudin The document discusses input/output (I/O) ports programming for the PIC18F4550 microcontroller. It describes the 5 ports - PORTA, PORTB, PORTC, PORTD, and PORTE, identifying the number of pins in each port. It explains that many pins have dual roles, serving as both general I/O pins and alternate functions. The document outlines how to configure ports as inputs or outputs using TRIS, PORT, and LAT registers. It provides examples of initializing ports and accessing registers by bit or byte to control individual pins.
Input Output programming in AVR microcontroller
Input Output programming in AVR microcontrollerRobo India Robo India in this presentation presents the Input and Output programming in AVR Micro Controllers namely Atmega 16, Atmega 8, Atmega 328, Atmega 32 etc.
As in robotics, automation and embedded system Input and Output programming is essential. This presentation describes how to use input and output ports, resisters of AVR microcontroller.
If you have any query please write us, we are found at-
website:http://roboindia.com
mail: [email protected]
Embedded system (Chapter 2) part 2
Embedded system (Chapter 2) part 2Ikhwan_Fakrudin This document provides an overview of microcontroller architecture and assembly language programming. It discusses the following key points in 3 sentences:
The document introduces PIC microcontrollers and assembly language, noting that assembly language uses mnemonic instructions that must be translated to machine code by an assembler. It explains the assembling and linking process used to convert assembly code to machine code that can be burned into the PIC's program memory. Various PIC assembly language instructions are also described, including MOVLW, MOVWF, logic instructions, and bit manipulation instructions to set and clear bits on I/O ports.
Relay and AVR Atmel Atmega 16
Relay and AVR Atmel Atmega 16Robo India Robo India presents the working and concept of electro mechanical switch Relay. It also explains how to use it with AVR family's microcontroller Atmel Atmega 16.
Introduction to MPLAB IDE
Introduction to MPLAB IDEKarim El-Rayes A starter guide how to use Microchip MPLAB IDE for PIC microcontrollers and related tools like MPLAB C18, C30 and C32 compilers, and how to MPLAB features to get connected and integrated with programmer/debugger devices and development kits from Microchip.
for more discussion and articles about different microcontroller platforms and tutorials please visit: http://elrayescampaign.blogspot.ca/
26. 8255 control word programming
26. 8255 control word programmingsandip das This document discusses programming examples for the 8255 programmable peripheral interface (PPI) chip in different modes. It provides:
1) A program to read dip switches at port B and display the reading at port A and port C using the 8255 configured in mode 0.
2) Control words to set individual bits (PC7 and PC3) on port C in bit set/reset (BSR) mode.
3) Addresses for the 3 ports (A, B, C) and control register of the 8255 when memory mapped to address 8000H.
Lec13
Lec13siddu kadiwal This document discusses the 8255 Programmable Peripheral Interface chip. It provides 3 key points:
1. The 8255 contains 3 I/O ports (A, B, C) that can be configured in different modes. Port A is 8-bits while ports B and C are either 4 or 8 bits depending on the mode.
2. The control register determines the configuration and operation mode of each port. Mode 0 provides basic I/O, mode 1 adds handshaking, and mode 2 makes port A bidirectional.
3. Programming the 8255 involves setting the control register to configure the ports and selecting the appropriate mode. Mode 2 is commonly used to interface with ADCs using port A
Programming the Digital I/O Interface of a PIC microcontroller
Programming the Digital I/O Interface of a PIC microcontrollerCorrado Santoro The document discusses the digital I/O interface of Microchip PIC18F microcontrollers. It explains that each pin can be programmed as an input or output. As an input, the pin can read logic high or low voltages to detect button presses or sensor signals. As an output, it can generate voltages to control LEDs or other devices. The document provides examples of connecting buttons, sensors, and LEDs to digital pins and programming the pins as inputs and outputs using configuration registers to read button states and toggle an LED.
AT mega8 basics
AT mega8 basicsthetechnicalzone The ATmega8 is an 8-bit microcontroller based on the AVR RISC architecture. It achieves high throughput of up to 16 MIPS at 16 MHz through single-cycle execution of powerful instructions. The microcontroller uses a Harvard architecture that separates memory and buses for program and data. It has 8K bytes of flash memory, 512 bytes of EEPROM, and 1K byte of internal RAM. The ATmega8 has three I/O ports (Ports B, C, and D) that can be configured as either inputs or outputs through their associated data direction, pin, and port registers.
Class7
Class7Sai Santosh Praveen This document discusses the I/O ports on the 8051 microcontroller and how to interface it with an external 8255 parallel I/O chip. It describes the internal structure and functionality of the 8051's four 8-bit I/O ports P0-P3. It also covers how to configure the ports for input or output, read from and write to the ports, and how the port pins are multiplexed with other signals. The document then discusses using the 8255 chip to expand the number of available I/O ports and provides an example of simple interfacing between the 8051 and 8255 with code.
Code2
Code2helalyrabiy This Arduino code controls a motor's speed based on the value read from a potentiometer. It sets pin 9 as an output to control the motor and pin 5 as an input to read the potentiometer. In the loop, it reads the potentiometer value, divides it by 4 to scale it to the motor's PWM range, writes this value to pin 9 to set the motor speed, and prints the value for testing.
Ch2 microcontroller architecture
Ch2 microcontroller architectureAhmad Sidik The document discusses the architecture and assembly language programming of PIC18 microcontrollers. It covers topics such as:
- PIC18 microcontrollers use a Harvard architecture with separate memory for instructions and data. They have a program memory, data memory, I/O ports, and support devices like timers.
- The PIC18 architecture is based on an advanced RISC design. Key components include registers like WREG for temporary data storage. Special function registers and general purpose registers are used to access I/O ports and timers.
- Assembly language instructions like MOVLW, ADDLW, and MOVWF are used to move data between program memory, registers and I/O ports. The
Arduino cic3
Arduino cic3Jeni Shah The document provides an overview of the Arduino Uno microcontroller board. It describes the main components of the board including 14 digital input/output pins, 6 analog inputs, a 16MHz crystal oscillator, a USB connection, a power jack, and a reset button. It also explains how to power the board using a USB cable connected to a computer or an external power supply. The document then introduces some basic Arduino programming concepts like functions, data types, control structures, and input/output functions.
PIC and LCD
PIC and LCDhairilfaiz86 This document contains code for initializing and controlling a LCD display module connected to a PIC16F887 microcontroller. It defines macros for the LCD pins and functions for initializing the LCD, writing data, clearing the display, moving the cursor, and printing strings. The main program initializes the LCD, prints two strings to different rows, and loops continuously displaying them.
Embedded system (Chapter )
Embedded system (Chapter )Ikhwan_Fakrudin The document discusses C programming for PIC microcontrollers. It covers the standard structure of a C program, including comments, header files, configuration bits, functions, and function bodies. It also discusses various C data types like unsigned char, signed char, unsigned int, and signed int. Examples are provided to illustrate how to use these data types and write C programs that toggle ports on a PIC microcontroller. The outcomes are for students to understand C programming languages for PIC18, the structure of C programs for PIC18, and common C data types used for PIC microcontrollers.
8051 microcontroller
8051 microcontrollerjokersclown57 This document contains information about Rahil Vyas, a 5th semester ECE student at Amiraj college with enroll number 131080111012. It describes the basic components, features, and specifications of the 8051 microcontroller including its internal ROM, RAM, I/O ports, timers, serial interface, and addressing modes. It provides block diagrams of the 8051 architecture and examples of different instruction types like data transfer, arithmetic, and stack operations.
Soc
SocCorrado Santoro The document describes implementing a system-on-chip (SoC) using VHDL that includes a CPU, ROM, and parallel I/O port. The CPU is a 32-bit RISC architecture with 32 general purpose registers and instructions include MOV, ADD, SUB, LOAD, STORE. The ROM stores the program code. The parallel I/O port interfaces with external devices and responds to memory reads and writes. Implementation details are provided for each component in VHDL including register definitions, control signals, and finite state machines to describe operation.
8155 GPPI
8155 GPPIdeval patel The document discusses the 8155 Programmable Peripheral Interface chip. It can be used as an interface between a microprocessor and I/O devices. The 8155 contains RAM, I/O ports, and a timer. It has ports A, B, and C that can be configured as input or output. The timer can operate in different modes. Programming the 8155 involves writing control words to its control register to configure the ports and timer. An example application shows how an 8155 can be used to interface an ADC and read temperature values using handshaking between the ADC and 8155 ports.
Microprocessor Interfacing and 8155 Features
Microprocessor Interfacing and 8155 FeaturesSrikrishna Thota The 8155 and 8156 microprocessor interface chips differ in that the 8155 has an active low Chip Enable (CE) signal, while the 8156 has an active high CE signal. The 8155 is a multifunction chip that contains RAM, I/O ports, and a timer. It has two 8-bit I/O ports, one 6-bit I/O port, a 14-bit counter/timer, 2Kb of RAM, and can be interfaced with the 8085 microprocessor. The document then provides details on the pinout, memory mapping, control register, port configurations, timer operation modes, and status register of the 8155 chip.
8255 ppi
8255 ppiSuraj Bora The 8255 PPI (Programmable Peripheral Interface) chip is used to interface I/O devices with microprocessors. It has 3 ports (A, B, and C) that are programmable and can operate in 3 different modes to handle input, output, and bidirectional data transfer with handshaking. Port C pins also act as handshake signals for ports A and B depending on the mode. The control word written to the 8255's control register determines which ports are inputs/outputs and the operating mode.
Handling Asynchronous Events in MCUs
Handling Asynchronous Events in MCUsCorrado Santoro This document describes using a finite state machine (FSM) approach to handle asynchronous events in microcontroller units (MCUs). It provides an example of toggling LEDs in response to button presses without using busy-waiting. The example encodes the button states as states in a FSM with states like "CHECK FOR PRESS" and "CHECK FOR RELEASE". Transitioning between these states based on button input allows handling events asynchronously and without blocking other tasks. It also describes adding a software timer to flash an LED while still handling button presses.
Robot operating systems (ros) overview &
Robot operating systems (ros) overview &Piyush Chand Robot Operating Systems (ROS) is an open-source, meta-operating system for robots that provides low-level device control and message passing between processes. ROS has a file system structure based on packages, manifests, and stacks to manage code organization. At the computation graph level, ROS uses nodes that communicate via topics and services, and is coordinated by a ROS Master and parameter server.
Robotics Technology By communication
Robotics Technology By communicationVignesh VCS This document discusses robotics and provides an overview of key topics including:
1. A brief history of robotics from 1954 to 1990 including major developments and companies.
2. Different classifications of robots including variable-sequence, playback, and numerical control robots as well as intelligent robots.
3. Common robot accessories including manipulators, end effectors, and grippers.
4. An introduction to robot programming methods including online teach pendant programming and offline programming using robot languages.
Ad
More Related Content
What's hot (20)
Input Output programming in AVR microcontroller
Input Output programming in AVR microcontrollerRobo India Robo India in this presentation presents the Input and Output programming in AVR Micro Controllers namely Atmega 16, Atmega 8, Atmega 328, Atmega 32 etc.
As in robotics, automation and embedded system Input and Output programming is essential. This presentation describes how to use input and output ports, resisters of AVR microcontroller.
If you have any query please write us, we are found at-
website:http://roboindia.com
mail: [email protected]
Embedded system (Chapter 2) part 2
Embedded system (Chapter 2) part 2Ikhwan_Fakrudin This document provides an overview of microcontroller architecture and assembly language programming. It discusses the following key points in 3 sentences:
The document introduces PIC microcontrollers and assembly language, noting that assembly language uses mnemonic instructions that must be translated to machine code by an assembler. It explains the assembling and linking process used to convert assembly code to machine code that can be burned into the PIC's program memory. Various PIC assembly language instructions are also described, including MOVLW, MOVWF, logic instructions, and bit manipulation instructions to set and clear bits on I/O ports.
Relay and AVR Atmel Atmega 16
Relay and AVR Atmel Atmega 16Robo India Robo India presents the working and concept of electro mechanical switch Relay. It also explains how to use it with AVR family's microcontroller Atmel Atmega 16.
Introduction to MPLAB IDE
Introduction to MPLAB IDEKarim El-Rayes A starter guide how to use Microchip MPLAB IDE for PIC microcontrollers and related tools like MPLAB C18, C30 and C32 compilers, and how to MPLAB features to get connected and integrated with programmer/debugger devices and development kits from Microchip.
for more discussion and articles about different microcontroller platforms and tutorials please visit: http://elrayescampaign.blogspot.ca/
26. 8255 control word programming
26. 8255 control word programmingsandip das This document discusses programming examples for the 8255 programmable peripheral interface (PPI) chip in different modes. It provides:
1) A program to read dip switches at port B and display the reading at port A and port C using the 8255 configured in mode 0.
2) Control words to set individual bits (PC7 and PC3) on port C in bit set/reset (BSR) mode.
3) Addresses for the 3 ports (A, B, C) and control register of the 8255 when memory mapped to address 8000H.
Lec13
Lec13siddu kadiwal This document discusses the 8255 Programmable Peripheral Interface chip. It provides 3 key points:
1. The 8255 contains 3 I/O ports (A, B, C) that can be configured in different modes. Port A is 8-bits while ports B and C are either 4 or 8 bits depending on the mode.
2. The control register determines the configuration and operation mode of each port. Mode 0 provides basic I/O, mode 1 adds handshaking, and mode 2 makes port A bidirectional.
3. Programming the 8255 involves setting the control register to configure the ports and selecting the appropriate mode. Mode 2 is commonly used to interface with ADCs using port A
Programming the Digital I/O Interface of a PIC microcontroller
Programming the Digital I/O Interface of a PIC microcontrollerCorrado Santoro The document discusses the digital I/O interface of Microchip PIC18F microcontrollers. It explains that each pin can be programmed as an input or output. As an input, the pin can read logic high or low voltages to detect button presses or sensor signals. As an output, it can generate voltages to control LEDs or other devices. The document provides examples of connecting buttons, sensors, and LEDs to digital pins and programming the pins as inputs and outputs using configuration registers to read button states and toggle an LED.
AT mega8 basics
AT mega8 basicsthetechnicalzone The ATmega8 is an 8-bit microcontroller based on the AVR RISC architecture. It achieves high throughput of up to 16 MIPS at 16 MHz through single-cycle execution of powerful instructions. The microcontroller uses a Harvard architecture that separates memory and buses for program and data. It has 8K bytes of flash memory, 512 bytes of EEPROM, and 1K byte of internal RAM. The ATmega8 has three I/O ports (Ports B, C, and D) that can be configured as either inputs or outputs through their associated data direction, pin, and port registers.
Class7
Class7Sai Santosh Praveen This document discusses the I/O ports on the 8051 microcontroller and how to interface it with an external 8255 parallel I/O chip. It describes the internal structure and functionality of the 8051's four 8-bit I/O ports P0-P3. It also covers how to configure the ports for input or output, read from and write to the ports, and how the port pins are multiplexed with other signals. The document then discusses using the 8255 chip to expand the number of available I/O ports and provides an example of simple interfacing between the 8051 and 8255 with code.
Code2
Code2helalyrabiy This Arduino code controls a motor's speed based on the value read from a potentiometer. It sets pin 9 as an output to control the motor and pin 5 as an input to read the potentiometer. In the loop, it reads the potentiometer value, divides it by 4 to scale it to the motor's PWM range, writes this value to pin 9 to set the motor speed, and prints the value for testing.
Ch2 microcontroller architecture
Ch2 microcontroller architectureAhmad Sidik The document discusses the architecture and assembly language programming of PIC18 microcontrollers. It covers topics such as:
- PIC18 microcontrollers use a Harvard architecture with separate memory for instructions and data. They have a program memory, data memory, I/O ports, and support devices like timers.
- The PIC18 architecture is based on an advanced RISC design. Key components include registers like WREG for temporary data storage. Special function registers and general purpose registers are used to access I/O ports and timers.
- Assembly language instructions like MOVLW, ADDLW, and MOVWF are used to move data between program memory, registers and I/O ports. The
Arduino cic3
Arduino cic3Jeni Shah The document provides an overview of the Arduino Uno microcontroller board. It describes the main components of the board including 14 digital input/output pins, 6 analog inputs, a 16MHz crystal oscillator, a USB connection, a power jack, and a reset button. It also explains how to power the board using a USB cable connected to a computer or an external power supply. The document then introduces some basic Arduino programming concepts like functions, data types, control structures, and input/output functions.
PIC and LCD
PIC and LCDhairilfaiz86 This document contains code for initializing and controlling a LCD display module connected to a PIC16F887 microcontroller. It defines macros for the LCD pins and functions for initializing the LCD, writing data, clearing the display, moving the cursor, and printing strings. The main program initializes the LCD, prints two strings to different rows, and loops continuously displaying them.
Embedded system (Chapter )
Embedded system (Chapter )Ikhwan_Fakrudin The document discusses C programming for PIC microcontrollers. It covers the standard structure of a C program, including comments, header files, configuration bits, functions, and function bodies. It also discusses various C data types like unsigned char, signed char, unsigned int, and signed int. Examples are provided to illustrate how to use these data types and write C programs that toggle ports on a PIC microcontroller. The outcomes are for students to understand C programming languages for PIC18, the structure of C programs for PIC18, and common C data types used for PIC microcontrollers.
8051 microcontroller
8051 microcontrollerjokersclown57 This document contains information about Rahil Vyas, a 5th semester ECE student at Amiraj college with enroll number 131080111012. It describes the basic components, features, and specifications of the 8051 microcontroller including its internal ROM, RAM, I/O ports, timers, serial interface, and addressing modes. It provides block diagrams of the 8051 architecture and examples of different instruction types like data transfer, arithmetic, and stack operations.
Soc
SocCorrado Santoro The document describes implementing a system-on-chip (SoC) using VHDL that includes a CPU, ROM, and parallel I/O port. The CPU is a 32-bit RISC architecture with 32 general purpose registers and instructions include MOV, ADD, SUB, LOAD, STORE. The ROM stores the program code. The parallel I/O port interfaces with external devices and responds to memory reads and writes. Implementation details are provided for each component in VHDL including register definitions, control signals, and finite state machines to describe operation.
8155 GPPI
8155 GPPIdeval patel The document discusses the 8155 Programmable Peripheral Interface chip. It can be used as an interface between a microprocessor and I/O devices. The 8155 contains RAM, I/O ports, and a timer. It has ports A, B, and C that can be configured as input or output. The timer can operate in different modes. Programming the 8155 involves writing control words to its control register to configure the ports and timer. An example application shows how an 8155 can be used to interface an ADC and read temperature values using handshaking between the ADC and 8155 ports.
Microprocessor Interfacing and 8155 Features
Microprocessor Interfacing and 8155 FeaturesSrikrishna Thota The 8155 and 8156 microprocessor interface chips differ in that the 8155 has an active low Chip Enable (CE) signal, while the 8156 has an active high CE signal. The 8155 is a multifunction chip that contains RAM, I/O ports, and a timer. It has two 8-bit I/O ports, one 6-bit I/O port, a 14-bit counter/timer, 2Kb of RAM, and can be interfaced with the 8085 microprocessor. The document then provides details on the pinout, memory mapping, control register, port configurations, timer operation modes, and status register of the 8155 chip.
8255 ppi
8255 ppiSuraj Bora The 8255 PPI (Programmable Peripheral Interface) chip is used to interface I/O devices with microprocessors. It has 3 ports (A, B, and C) that are programmable and can operate in 3 different modes to handle input, output, and bidirectional data transfer with handshaking. Port C pins also act as handshake signals for ports A and B depending on the mode. The control word written to the 8255's control register determines which ports are inputs/outputs and the operating mode.
Handling Asynchronous Events in MCUs
Handling Asynchronous Events in MCUsCorrado Santoro This document describes using a finite state machine (FSM) approach to handle asynchronous events in microcontroller units (MCUs). It provides an example of toggling LEDs in response to button presses without using busy-waiting. The example encodes the button states as states in a FSM with states like "CHECK FOR PRESS" and "CHECK FOR RELEASE". Transitioning between these states based on button input allows handling events asynchronously and without blocking other tasks. It also describes adding a software timer to flash an LED while still handling button presses.
Viewers also liked (11)
Robot operating systems (ros) overview &
Robot operating systems (ros) overview &Piyush Chand Robot Operating Systems (ROS) is an open-source, meta-operating system for robots that provides low-level device control and message passing between processes. ROS has a file system structure based on packages, manifests, and stacks to manage code organization. At the computation graph level, ROS uses nodes that communicate via topics and services, and is coordinated by a ROS Master and parameter server.
Robotics Technology By communication
Robotics Technology By communicationVignesh VCS This document discusses robotics and provides an overview of key topics including:
1. A brief history of robotics from 1954 to 1990 including major developments and companies.
2. Different classifications of robots including variable-sequence, playback, and numerical control robots as well as intelligent robots.
3. Common robot accessories including manipulators, end effectors, and grippers.
4. An introduction to robot programming methods including online teach pendant programming and offline programming using robot languages.
Seminar On Kalman Filter And Its Applications
Seminar On Kalman Filter And Its ApplicationsBarnali Dey The document discusses Kalman filters and their applications. It provides an overview of Kalman filters, explaining that they are used to estimate unknown system states from measurements that contain errors. It describes the basic algorithmic steps of Kalman filters, including prediction to project the state ahead and correction to incorporate new measurements. Finally, it gives examples of applications, such as for channel estimation in direct sequence spread spectrum communication systems.
Introduction to ROS (Robot Operating System) 
Introduction to ROS (Robot Operating System) hvcoup ROS is a framework that provides a communication infrastructure, robot-specific features, eliminates programming language barriers, and includes diagnostic and advanced simulation tools. It acts as a meta-operating system through its collection of frameworks, SDKs, and software that address the challenges of robot integration complexity. ROS was created in 2008 and is currently maintained by OSRF, with 9 versions released so far.
Kalman filter for object tracking
Kalman filter for object trackingMohit Yadav This document discusses using the Kalman filter for object tracking. It begins by introducing the Kalman filter as a linear discrete-time system and describes its process and measurement equations. It then discusses using the Kalman filter to optimally estimate parameters and extend it to model non-linear systems using a Taylor series approximation. The document describes using the basic and extended Kalman filters for object tracking by initializing the object position and iteratively predicting and correcting its state. It also discusses combining the Kalman filter with mean shift for object tracking and using an adaptive Kalman filter to handle occlusions.
Traffic signal controller using at89 c52 microcontroller
Traffic signal controller using at89 c52 microcontrollerrock_007 This document describes a traffic signal controller project using an AT89C52 microcontroller. The project synchronizes two different traffic signals and changes the states of the signal lights according to different timings. The required hardware includes an AT89C52 chip, 6 LEDs (2 red, 2 yellow, 2 green) and 6 resistors. The software used is Keil uVision3 to create a hex file and Nvis 5001 to dump the hex file to the hardware. The microcontroller controls the two traffic signals so they change states together based on a 30 second timer cycle.
Textual Robot programming
Textual Robot programmingCHEMGLOBE To make it serve itself for performing useful functions like approaching to work piece, automatic motion in workspace, robot programming is very important. Robot programming is important to coordinate various tasks & activities that needed in workspace. Coordination of robot is done by using various sensors & end effectors which can be coordinated by programs and simulation software’s.
Industrial robots
Industrial robotsOhgoma This document defines robots and describes different types of industrial robots. It begins by defining a robot as a machine that can carry out complex actions automatically through programming to resemble human movements and functions. The main components of a robot are then outlined as the robot arms, sensors, end parts, controller, and drive. Several common types of industrial robots are also described, including Cartesian, cylindrical, spherical/polar, SCARA, articulated, and parallel robots. Each robot type is suited for different assembly or manufacturing tasks.
Industrial robotics
Industrial roboticsPrasanth Kumar RAGUPATHY This document provides an overview of industrial robotics, including robot anatomy, control systems, end effectors, applications, and programming. It describes the typical components of a robot like links, joints, drives, and sensors. Common robot configurations and their joint notation are shown. The document also discusses robot programming methods including leadthrough and textual languages, as well as simulation for offline programming.
Robot programming
Robot programmingGopal Saini This document discusses robot programming methods. It describes different types of robot programming including joint-level, robot-level, and high-level programming. It also covers various robot programming methods such as manual, walkthrough, leadthrough, and offline programming. Specific programming languages and their applications are also summarized.
Robot operating systems (ros) overview & (1)
Robot operating systems (ros) overview & (1)Piyush Chand The document provides an overview of Robot Operating System (ROS) and demonstrates Kinect tracking capabilities using OpenNI and ROS. It describes ROS architecture including packages, stacks, messages and services. It explains how ROS nodes communicate via topics, services and parameter server. It also gives technical details of Kinect sensor and how OpenNI framework is used for skeletal tracking and gesture recognition with Kinect. Finally, it demonstrates a ROS-based Kinect application for skeleton tracking, cursor control and hand gestures.
Ad
Similar to Programming A Robot Using (20)
Presentation
PresentationAbhijit Das This presentation discusses an embedded system project to control a fan based on temperature. It includes:
- An overview of Skyphi Technologies, an organization that provides training in embedded systems and other domains.
- A definition of embedded systems and examples like ATMs, aircraft systems, and more.
- An introduction to the AVR microcontroller and its features like the ATmega8, programming tools, and pin diagram.
- Explanations of embedded C programming structure, I/O ports, registers, and programming the AVR microcontroller.
- Details of the temperature controlled fan project including components, working principle, circuit diagram, and code overview.
- Applications of the temperature controlled fan
knowledge in daily life.ppt
knowledge in daily life.pptSunilSharma941036 This document discusses input/output interfaces in microprocessor systems. It begins by introducing I/O interfaces and their purpose of enabling communication between microprocessors and peripheral devices like keyboards, displays and printers. It then describes two common approaches to I/O - isolated I/O which uses separate I/O instructions, and memory-mapped I/O which treats I/O devices as memory locations. The document proceeds to discuss I/O instructions, providing examples for 8088 and 80x86 processors. It also discusses implementing I/O in high-level languages like Pascal, Delphi, C/C++ using inline assembly instructions. Finally, it provides examples of simple I/O circuits and software to interface switches and LED
DEF CON 23 - Rodringo Almeida - embedded system design from electronics 
DEF CON 23 - Rodringo Almeida - embedded system design from electronics Felipe Prado This document provides an overview of concepts related to developing an embedded system kernel. It discusses developing a custom kernel versus using alternatives like FreeRTOS. It covers key kernel design decisions like process and I/O management. The document outlines the approach taken in this course, which is to develop a microkernel that is non-preemptive, cooperative, and does not include memory management. It also discusses concepts important for kernel development like function pointers, structures, circular buffers, and temporal conditions.
What will be quantization step size in numbers and in voltage for th.pdf
What will be quantization step size in numbers and in voltage for th.pdfSIGMATAX1 What will be quantization step size in numbers and in voltage for this Arduino Code? Using 5V
const int led1 = 2;
const int led2 = 3;
const int led3 = 4;
void setup() {
pinMode(led1, OUTPUT);
pinMode(led2, OUTPUT);
pinMode(led3, OUTPUT);
// initialize serial communication at 9600 bits per second:
Serial.begin(9600);
}
// the loop routine runs over and over again forever:
void loop() {
// read the input on analog pin 0:
int sensorValue = analogRead(A0);
int dataConv = sensorValue*(8.0/1024);
//write analog equvivalant data on led pins
switch(dataConv)
{
case 0: {
digitalWrite(led1,LOW);
digitalWrite(led2,LOW);
digitalWrite(led3,LOW);
break;
}
case 1: {
digitalWrite(led1,HIGH);
digitalWrite(led2,LOW);
digitalWrite(led3,LOW);
break;
}
case 2: {
digitalWrite(led1,LOW);
digitalWrite(led2,HIGH);
digitalWrite(led3,LOW);
break;
}
case 3: {
digitalWrite(led1,HIGH);
digitalWrite(led2,HIGH);
digitalWrite(led3,LOW);
break;
}
case 4: {
digitalWrite(led1,LOW);
digitalWrite(led2,LOW);
digitalWrite(led3,HIGH);
break;
}
case 5: {
digitalWrite(led1,HIGH);
digitalWrite(led2,LOW);
digitalWrite(led3,HIGH);
break;
}
case 6: {
digitalWrite(led1,LOW);
digitalWrite(led2,HIGH);
digitalWrite(led3,HIGH);
break;
}
case 7: {
digitalWrite(led1,HIGH);
digitalWrite(led2,HIGH);
digitalWrite(led3,HIGH);
break;
}
}
Serial.println(sensorValue); // print out the value you read:
Serial.println(dataConv);
delay(1000); // delay in between reads for stability
}
const int led1 = 2;
const int led2 = 3;
const int led3 = 4;
void setup() {
pinMode(led1, OUTPUT);
pinMode(led2, OUTPUT);
pinMode(led3, OUTPUT);
// initialize serial communication at 9600 bits per second:
Serial.begin(9600);
}
// the loop routine runs over and over again forever:
void loop() {
// read the input on analog pin 0:
int sensorValue = analogRead(A0);
int dataConv = sensorValue*(8.0/1024);
//write analog equvivalant data on led pins
switch(dataConv)
{
case 0: {
digitalWrite(led1,LOW);
digitalWrite(led2,LOW);
digitalWrite(led3,LOW);
break;
}
case 1: {
digitalWrite(led1,HIGH);
digitalWrite(led2,LOW);
digitalWrite(led3,LOW);
break;
}
case 2: {
digitalWrite(led1,LOW);
digitalWrite(led2,HIGH);
digitalWrite(led3,LOW);
break;
}
case 3: {
digitalWrite(led1,HIGH);
digitalWrite(led2,HIGH);
digitalWrite(led3,LOW);
break;
}
case 4: {
digitalWrite(led1,LOW);
digitalWrite(led2,LOW);
digitalWrite(led3,HIGH);
break;
}
case 5: {
digitalWrite(led1,HIGH);
digitalWrite(led2,LOW);
digitalWrite(led3,HIGH);
break;
}
case 6: {
digitalWrite(led1,LOW);
digitalWrite(led2,HIGH);
digitalWrite(led3,HIGH);
break;
}
case 7: {
digitalWrite(led1,HIGH);
digitalWrite(led2,HIGH);
digitalWrite(led3,HIGH);
break;
}
}
Serial.println(sensorValue); // print out the value you read:
Serial.println(dataConv);
delay(1000); // delay in between reads for stability
}
Solution
// Random LED Dots - from noise source
// Ed Nisley - KE4ANU - September 2015
//----------
// Pin assignments
const byte PIN_HEARTBEAT = 8; // DO - heartbeat LED
const byte PIN_SYNC = A3; // DO.
Microcontroller
MicrocontrollerSpitiq A microcontroller is a computer system on a single chip that contains a processor core, memory, and programmable input/output peripherals. Microcontrollers are commonly used to control objects, processes, or events. They are often embedded in devices to control their functions. A microcontroller contains a CPU, RAM, ROM, flash memory, I/O ports, an ADC, and timers. Common microcontrollers include the Intel 8051, Atmel ATmega 16, and PIC microcontrollers. The microcontroller reads programmed instructions from flash memory and executes them via the CPU to control its I/O pins based on inputs.
Embedded systems design @ defcon 2015
Embedded systems design @ defcon 2015Rodrigo Almeida The document discusses developing an embedded system kernel project. It explains that a kernel manages processes, memory, and communication between hardware and processes. While developing one's own kernel allows for full control, it is also very time intensive. Alternatives like FreeRTOS are discussed. The document also covers the differences between monolithic and micro kernels. It states that this project will use a non-preemptive, cooperative microkernel that schedules processes and does not include memory management.
Hardware interfacing basics using AVR
Hardware interfacing basics using AVRMohamed Abdallah Hardware interfacing basics using AVR ATMega16L:
* Hardware Interfacing concept.
* GPIO for simple I/O.
* Polling vs. Interrupts.
* Timer.
* PWM (Pulse Width Modulation).
* Communication protocols (UART, SPI, I2C).
* ADC (Analog to Digital Converter).
Analog To Digital Conversion (ADC) Programming in LPC2148
Analog To Digital Conversion (ADC) Programming in LPC2148Omkar Rane 1) The document describes programming the on-chip 10-bit ADC of the LPC2148 microcontroller to implement a simple data acquisition system. It discusses the features of the ADC, the programming interface, control registers, and provides code to initialize the ADC and read conversion results.
2) The code configures the ADC ports and control registers, reads the conversion results when the ADC status indicates a conversion is complete, and prints the voltage levels to the UART.
3) The results show the ADC accurately converts analog voltages from 0-3.1V to their corresponding 10-bit digital values, which are printed to the UART terminal.
MICROCONTROLLER.pptx
MICROCONTROLLER.pptxfiqrie mohd This document provides information about the PIC16F877A microcontroller. It discusses:
- The PIC16F877A is a popular 8-bit microcontroller with features like RAM, ROM, timers, ADC and I/O pins.
- It provides a block diagram showing the architecture and memory mapping of the chip.
- Programming and interfacing aspects like I/O pin operation, ADC, interrupts and communication protocols are described.

Sensors and Actuators in Arduino, Introduction
Sensors and Actuators in Arduino, IntroductionBibekPokhrel13 This presentation includes introduction to inputs snd outputs on arduino UNO.
8255
8255INTERNATIONAL SCHOOL OF TECHNOLOGY & SCIENCES (FOR WOMEN) The document discusses interfacing various peripherals to an 8086 microprocessor using an 8255 PPI chip. It describes the different modes of operation of the 8255 and provides examples of interfacing a keyboard, displays, stepper motor, DAC, and ADC. Circuit diagrams and programming examples are given for displaying numbers on a 7-segment display, generating waveforms using a DAC, and sampling an analog input with an ADC. Interfacing of peripherals like stepper motors, keyboards and displays allows microprocessors to interact with the external world.

Atmega16
Atmega16Thrived Kumar The document discusses the ATmega16 microcontroller. It begins by explaining the differences between microprocessors and microcontrollers, and introduces the ATmega16 as a low-power 8-bit microcontroller based on AVR architecture. It then details the features of the ATmega16 including its pinout, registers, memory, and I/O ports. The document also provides examples of coding and interfacing the ATmega16, such as blinking an LED and using delay functions.
Avr report
Avr reportNITISH KUMAR The document provides information about training performed on the AVR microcontroller. It discusses the features of the ATmega8 microcontroller including its architecture, memory, I/O ports, and peripherals. It also describes tasks performed during training such as interfacing LEDs, buttons, keypads, displays, ADC, and DC motors to learn about digital I/O, serial communication, and analog input.
Lec03
Lec03siddu kadiwal The document discusses the 8085 microprocessor architecture, its instruction set, and assembly language programming. It describes the 8085 features, registers, bus structure, and instruction types. Examples are provided of assembly language programs to perform arithmetic operations, data transfers, and a factorial calculation using subroutines.
AVR arduino dasar
AVR arduino dasarOktaf Kharisma This document provides an overview of the topics that will be covered in lectures 6-9 of a course on the ATmega328 microcontroller and Arduino. Lecture 6 will introduce the ATmega architecture, instruction set, I/O pins, and the Arduino programming language. Lecture 7 will cover controlling time with interrupts and timers. Lecture 8 will include a guest lecture on radio communication. Lecture 9 will discuss designing PID controllers. The document then provides details on the ATmega328 architecture, memory, registers, instruction set, I/O interfaces and Arduino programming.
Introduction to Arduino
Microcontroller
Introduction to Arduino
MicrocontrollerMujahid Hussain Arduino is an open-source project that created microcontroller-based kits for building digital devices and interactive objects that can sense and control physical devices.
Basics Of Embedded Systems
Basics Of Embedded Systemsarlabstech The Presentation is basically made to give the overview of embedded systems try to implement this knowledge to make your own small embedded systems.
Lecture7
Lecture7Mahmut Yildiz This document discusses timers and interrupts on the ATmega328 microcontroller. It describes the digital I/O pins and functions for controlling them. It then covers the different types of interrupts including external interrupts from pins and pin change interrupts. The rest of the document details the timer/counter units 0, 1, and 2, including their registers, modes, and how to configure interrupts from timer events.
Ad
Recently uploaded (20)
UiPath Community Berlin: Orchestrator API, Swagger, and Test Manager API
UiPath Community Berlin: Orchestrator API, Swagger, and Test Manager APIUiPathCommunity Join this UiPath Community Berlin meetup to explore the Orchestrator API, Swagger interface, and the Test Manager API. Learn how to leverage these tools to streamline automation, enhance testing, and integrate more efficiently with UiPath. Perfect for developers, testers, and automation enthusiasts!
📕 Agenda
Welcome & Introductions
Orchestrator API Overview
Exploring the Swagger Interface
Test Manager API Highlights
Streamlining Automation & Testing with APIs (Demo)
Q&A and Open Discussion
Perfect for developers, testers, and automation enthusiasts!
👉 Join our UiPath Community Berlin chapter: https://community.uipath.com/berlin/
This session streamed live on April 29, 2025, 18:00 CET.
Check out all our upcoming UiPath Community sessions at https://community.uipath.com/events/.

Cybersecurity Identity and Access Solutions using Azure AD
Cybersecurity Identity and Access Solutions using Azure ADVICTOR MAESTRE RAMIREZ Cybersecurity Identity and Access Solutions using Azure AD
Procurement Insights Cost To Value Guide.pptx
Procurement Insights Cost To Value Guide.pptxJon Hansen Procurement Insights integrated Historic Procurement Industry Archives, serves as a powerful complement — not a competitor — to other procurement industry firms. It fills critical gaps in depth, agility, and contextual insight that most traditional analyst and association models overlook.
Learn more about this value- driven proprietary service offering here.
Social Media App Development Company-EmizenTech
Social Media App Development Company-EmizenTechSteve Jonas EmizenTech is a trusted Social Media App Development Company with 11+ years of experience in building engaging and feature-rich social platforms. Our team of skilled developers delivers custom social media apps tailored to your business goals and user expectations. We integrate real-time chat, video sharing, content feeds, notifications, and robust security features to ensure seamless user experiences. Whether you're creating a new platform or enhancing an existing one, we offer scalable solutions that support high performance and future growth. EmizenTech empowers businesses to connect users globally, boost engagement, and stay competitive in the digital social landscape.
Build Your Own Copilot & Agents For Devs
Build Your Own Copilot & Agents For DevsBrian McKeiver May 2nd, 2025 talk at StirTrek 2025 Conference.
Increasing Retail Store Efficiency How can Planograms Save Time and Money.pptx
Increasing Retail Store Efficiency How can Planograms Save Time and Money.pptxAnoop Ashok In today's fast-paced retail environment, efficiency is key. Every minute counts, and every penny matters. One tool that can significantly boost your store's efficiency is a well-executed planogram. These visual merchandising blueprints not only enhance store layouts but also save time and money in the process.
Rusty Waters: Elevating Lakehouses Beyond Spark
Rusty Waters: Elevating Lakehouses Beyond Sparkcarlyakerly1 Spark is a powerhouse for large datasets, but when it comes to smaller data workloads, its overhead can sometimes slow things down. What if you could achieve high performance and efficiency without the need for Spark?
At S&P Global Commodity Insights, having a complete view of global energy and commodities markets enables customers to make data-driven decisions with confidence and create long-term, sustainable value. 🌍
Explore delta-rs + CDC and how these open-source innovations power lightweight, high-performance data applications beyond Spark! 🚀
Quantum Computing Quick Research Guide by Arthur Morgan
Quantum Computing Quick Research Guide by Arthur MorganArthur Morgan This is a Quick Research Guide (QRG).
QRGs include the following:
- A brief, high-level overview of the QRG topic.
- A milestone timeline for the QRG topic.
- Links to various free online resource materials to provide a deeper dive into the QRG topic.
- Conclusion and a recommendation for at least two books available in the SJPL system on the QRG topic.
QRGs planned for the series:
- Artificial Intelligence QRG
- Quantum Computing QRG
- Big Data Analytics QRG
- Spacecraft Guidance, Navigation & Control QRG (coming 2026)
- UK Home Computing & The Birth of ARM QRG (coming 2027)
Any questions or comments?
- Please contact Arthur Morgan at [email protected].
100% human made.
Web and Graphics Designing Training in Rajpura
Web and Graphics Designing Training in RajpuraErginous Technology Web & Graphics Designing Training at Erginous Technologies in Rajpura offers practical, hands-on learning for students, graduates, and professionals aiming for a creative career. The 6-week and 6-month industrial training programs blend creativity with technical skills to prepare you for real-world opportunities in design.
The course covers Graphic Designing tools like Photoshop, Illustrator, and CorelDRAW, along with logo, banner, and branding design. In Web Designing, you’ll learn HTML5, CSS3, JavaScript basics, responsive design, Bootstrap, Figma, and Adobe XD.
Erginous emphasizes 100% practical training, live projects, portfolio building, expert guidance, certification, and placement support. Graduates can explore roles like Web Designer, Graphic Designer, UI/UX Designer, or Freelancer.
For more info, visit erginous.co.in , message us on Instagram at erginoustechnologies, or call directly at +91-89684-38190 . Start your journey toward a creative and successful design career today!
TrsLabs - Fintech Product & Business Consulting
TrsLabs - Fintech Product & Business ConsultingTrs Labs Hybrid Growth Mandate Model with TrsLabs
Strategic Investments, Inorganic Growth, Business Model Pivoting are critical activities that business don't do/change everyday. In cases like this, it may benefit your business to choose a temporary external consultant.
An unbiased plan driven by clearcut deliverables, market dynamics and without the influence of your internal office equations empower business leaders to make right choices.
Getting things done within a budget within a timeframe is key to Growing Business - No matter whether you are a start-up or a big company
Talk to us & Unlock the competitive advantage
Special Meetup Edition - TDX Bengaluru Meetup #52.pptx
Special Meetup Edition - TDX Bengaluru Meetup #52.pptxshyamraj55 We’re bringing the TDX energy to our community with 2 power-packed sessions:
🛠️ Workshop: MuleSoft for Agentforce
Explore the new version of our hands-on workshop featuring the latest Topic Center and API Catalog updates.
📄 Talk: Power Up Document Processing
Dive into smart automation with MuleSoft IDP, NLP, and Einstein AI for intelligent document workflows.

TrustArc Webinar: Consumer Expectations vs Corporate Realities on Data Broker...
TrustArc Webinar: Consumer Expectations vs Corporate Realities on Data Broker...TrustArc Most consumers believe they’re making informed decisions about their personal data—adjusting privacy settings, blocking trackers, and opting out where they can. However, our new research reveals that while awareness is high, taking meaningful action is still lacking. On the corporate side, many organizations report strong policies for managing third-party data and consumer consent yet fall short when it comes to consistency, accountability and transparency.
This session will explore the research findings from TrustArc’s Privacy Pulse Survey, examining consumer attitudes toward personal data collection and practical suggestions for corporate practices around purchasing third-party data.
Attendees will learn:
- Consumer awareness around data brokers and what consumers are doing to limit data collection
- How businesses assess third-party vendors and their consent management operations
- Where business preparedness needs improvement
- What these trends mean for the future of privacy governance and public trust
This discussion is essential for privacy, risk, and compliance professionals who want to ground their strategies in current data and prepare for what’s next in the privacy landscape.
Technology Trends in 2025: AI and Big Data Analytics
Technology Trends in 2025: AI and Big Data AnalyticsInData Labs At InData Labs, we have been keeping an ear to the ground, looking out for AI-enabled digital transformation trends coming our way in 2025. Our report will provide a look into the technology landscape of the future, including:
-Artificial Intelligence Market Overview
-Strategies for AI Adoption in 2025
-Anticipated drivers of AI adoption and transformative technologies
-Benefits of AI and Big data for your business
-Tips on how to prepare your business for innovation
-AI and data privacy: Strategies for securing data privacy in AI models, etc.
Download your free copy nowand implement the key findings to improve your business.
Noah Loul Shares 5 Steps to Implement AI Agents for Maximum Business Efficien...
Noah Loul Shares 5 Steps to Implement AI Agents for Maximum Business Efficien...Noah Loul Artificial intelligence is changing how businesses operate. Companies are using AI agents to automate tasks, reduce time spent on repetitive work, and focus more on high-value activities. Noah Loul, an AI strategist and entrepreneur, has helped dozens of companies streamline their operations using smart automation. He believes AI agents aren't just tools—they're workers that take on repeatable tasks so your human team can focus on what matters. If you want to reduce time waste and increase output, AI agents are the next move.
Designing Low-Latency Systems with Rust and ScyllaDB: An Architectural Deep Dive
Designing Low-Latency Systems with Rust and ScyllaDB: An Architectural Deep DiveScyllaDB Want to learn practical tips for designing systems that can scale efficiently without compromising speed?
Join us for a workshop where we’ll address these challenges head-on and explore how to architect low-latency systems using Rust. During this free interactive workshop oriented for developers, engineers, and architects, we’ll cover how Rust’s unique language features and the Tokio async runtime enable high-performance application development.
As you explore key principles of designing low-latency systems with Rust, you will learn how to:
- Create and compile a real-world app with Rust
- Connect the application to ScyllaDB (NoSQL data store)
- Negotiate tradeoffs related to data modeling and querying
- Manage and monitor the database for consistently low latencies
Role of Data Annotation Services in AI-Powered Manufacturing
Role of Data Annotation Services in AI-Powered ManufacturingAndrew Leo From predictive maintenance to robotic automation, AI is driving the future of manufacturing. But without high-quality annotated data, even the smartest models fall short.
Discover how data annotation services are powering accuracy, safety, and efficiency in AI-driven manufacturing systems.
Precision in data labeling = Precision on the production floor.
Mastering Advance Window Functions in SQL.pdf
Mastering Advance Window Functions in SQL.pdfSpiral Mantra How well do you really know SQL?📊
.
.
If PARTITION BY and ROW_NUMBER() sound familiar but still confuse you, it’s time to upgrade your knowledge
And you can schedule a 1:1 call with our industry experts: https://spiralmantra.com/contact-us/ or drop us a mail at [email protected]
HCL Nomad Web – Best Practices and Managing Multiuser Environments
HCL Nomad Web – Best Practices and Managing Multiuser Environmentspanagenda Webinar Recording: https://www.panagenda.com/webinars/hcl-nomad-web-best-practices-and-managing-multiuser-environments/
HCL Nomad Web is heralded as the next generation of the HCL Notes client, offering numerous advantages such as eliminating the need for packaging, distribution, and installation. Nomad Web client upgrades will be installed “automatically” in the background. This significantly reduces the administrative footprint compared to traditional HCL Notes clients. However, troubleshooting issues in Nomad Web present unique challenges compared to the Notes client.
Join Christoph and Marc as they demonstrate how to simplify the troubleshooting process in HCL Nomad Web, ensuring a smoother and more efficient user experience.
In this webinar, we will explore effective strategies for diagnosing and resolving common problems in HCL Nomad Web, including
- Accessing the console
- Locating and interpreting log files
- Accessing the data folder within the browser’s cache (using OPFS)
- Understand the difference between single- and multi-user scenarios
- Utilizing Client Clocking
Programming A Robot Using
- 1. PROGRAMMING A ROBOT USING ICC AVR Ver 7.5
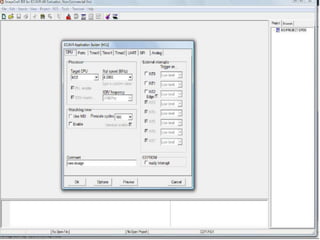
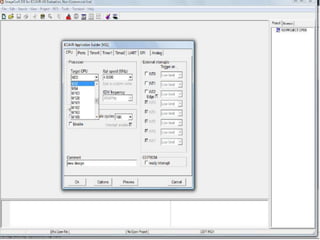
- 2. ICC AVR ver 7.5ICC AVR is a tool used to program Atmel microcontrollers.It uses a C compiler to compile the high level code into a low level code.ICC AVR then converts this low level code into HEX code.It also has built in tools to program the flash memory of the microcontroller.
- 3. HOW TO INSTALL ICC AVR ver 7.5
- 4. ICC AVR ver 7.5 is not a freeware and thus you have to purchase it.But 45 days trial versions are available on the net and they give almost the same features.Thus download the setup of the trial version from the site : http://www.imagecraft.com/Run the setup and install ICC AVR ver 7.5
- 5. HOW TO USE ICC AVR ver 7.5
- 15. H BRIDGE PIN-OUT
- 25. Input Output PORTS• Four, 8 bit I/O ports- PORT A,B,C,D• All I/O ports pins are bidirectional and can beconfigured individually• Input pins can be configured to utilizeinternal pullups.• Data Direction Register , DDRn• Port Driver Register, PORTn• Port Pin Register, PINn
- 26. Data Direction Register, DDRn• Determines the direction of individual pins ofports• If the bit of the DDR is set the corresponding pinof the port is configured as output pin• If the bit of the DDR is cleared thecorresponding pin of the port is configured asinput pin• DDRA = 0xF0;• 4 MSB pins of PORTA are output pins• 4 LSB pins of PORTA are input pins
- 27. Port Pin Register, PINn• Reading the input pins of port is done byreading PIN register• Temp = PINA;• Read the PORTA input and store in temp variable
- 28. Port Drive Register, PORTn• For pins configured as input(DDRn[x] = 0) microcontroller connects ainternal pull up register if thecorresponding bit of PORTn is set• If the PORTn bit is cleared, pin is Tristated• DDRA = 0x00;• PORTA = 0xF0
- 29. Buzzer On / OFF• PORT B pin 7• Pin is configured as output• DDRB= 0x80;• To turn on the buzzer output high• PORTB = 0x80;• To turn off the buzzer output low• PORTB = 0x00;
- 30. Buzzer Functionvoid Buzzer_ON(void){PORTB = 0x80;}void Buzzer_OFF(void){PORTB = PORTB & 0x7F;}
- 31. LED DISPLAY8 bit LED display is connected to PORTD.To display any bit combination on the LED display, we use… PORTD=0xXX;
- 32. CODE FOR LED DISPLAYvoid main(void){init_devices(); while(1) { PORTD=0xFF; }}
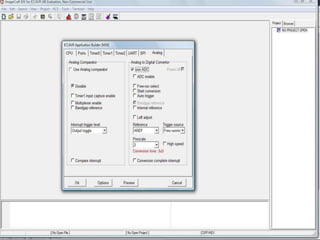
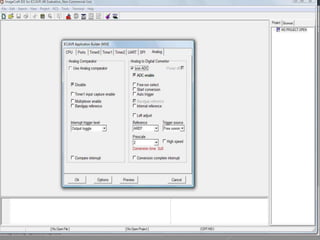
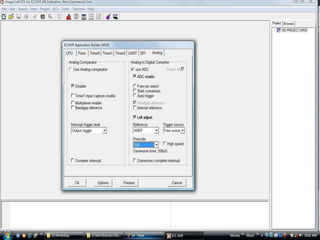
- 33. Analog To Digital Converter• 10 bit resolution• 8 channels• PORTA(0 – 7)• Disable internal pull up• ADCH & ADCL – Data Register• ADMUX- Channel Select Register• ADCSR – Control & Status Register
- 35. unsigned char ADC_conversion (unsigned char ADC_channel_number) { unsigned inti = 0; ADCH = 0x00;i = ADC_channel_number & 0x0F; // keeping the loweatnibbel ADMUX = i | 0x20; //upper nibbel of 0x20 indicates the result is left adjusted (8 bit ADC conversion) ADCSR |= 0x40; for (i = 1; i < 255; i++); //delay of 93.2 uSi = ADCH; return (i);}void main(void){ unsigned char I, value[3];; for(i=0;i<3;i++) { value[i]=ADC_conversion(i); }}
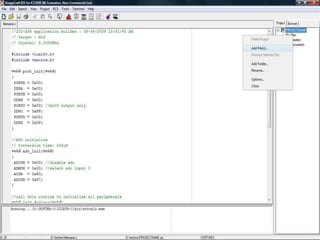
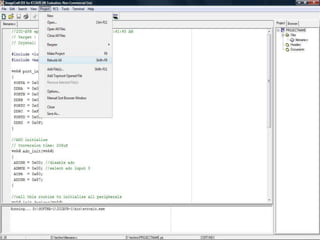
- 36. HOW TO COMPILE AND BUILD YOUR CODE
- 53. After you program your robot, it is ready to run the code written onto the microcontroller.So just power on the microcontroller and it will start the execution of the code.
- 54. MOTION CONTROL AND LINE FOLLOWING
- 55. PORT CONFIGURATIONPORTA is ADC port.3 white line sensors are connected to pin1, pin2, pin 3 of PORTA.PORTC is connected to the H-bridge.
- 56. CODE FOR MOTION void delay(int time) {inti,j; for(i=0;i<time;i++) for(j=0;j<500;j++);}void backward(void) // subroutine for backward motion{ PORTC=0xB4; delay(100);}void right(void) // subroutine for right motion{ PORTC=0xB8; delay(100);}void left(void) // subroutine for left motion{ PORTC=0xD4; delay(100);}void forward(void) // subroutine for forward motion{ PORTC=0xD8; delay(100);} void stop(void) // subroutine for stop motion{ PORTC=0xFF; delay(100);}//void main(void){init_devices(); //insert your functional code here... forward(); delay(1000); left(); delay(100); forward(); delay(1000); right(); delay(100); backward(); delay(1000); stop(); delay(100);}
- 57. CODE FOR LINE FOLLOWERunsigned intADC_conversion (unsigned intADC_channel_number) { unsigned inti = 0; ADCH = 0x00;i = ADC_channel_number & 0x0F; // keeping the loweatnibbel ADMUX = i | 0x20; ADCSR |= 0x40; for (i = 1; i < 255; i++); //delay of 93.2 uSi = ADCH; return (i);}void forward(void){ PORTC=0xD8;}void left(void){ PORTC=0xB8;}void right(void){ PORTC=0xD4;}void backward(void){ PORTC=0xB4;} //void main(void){unsigned char value[3];unsigned char i;init_devices(); while(1) { for(i=0;i<3;i++) { value[i]=ADC_conversion(i); } if (value[1] < 50) { forward(); } else { if(value[2] > 90) {left(); } else { if (value[0] > 90) {right(); }else { backward();}} } } }
- 58. THANK YOU…