



![Why Control is important? [for production process/ in
plant]
(1) Safety: Prevent injury to plant personnel, protect the environment by
preventing emission and minimizing waste and prevent damage to the
process equipment.
(2) Maintain product quality (composition, purity, color, etc.) on a
continuous basis and with minimum cost.
(3) Maintain plant production rate at minimum cost.
So, we can say that the reasons for automation of process plants are to
provide safety and at same time maintain desired product quality, high
plant throughput, and reduce demand on human labor.
5](https://image.slidesharecdn.com/1-240928173114-2fc83779/85/1-Introduction-to-Control-System-Engineering-pdf-5-320.jpg)


































1.Introduction to Control System Engineering.pdf
- 1. 1 EEE 2221 Introduction to Control System Engineering Nayeema Hasan Lecturer Dept. of EEE, KUET. Reference Books: ‘Modern Control Engineering’- by Katsuhiko Ogata.
- 2. System A system is a collection of components which interact with each other and with the environment (by information or energy links) from which the system is separated by a notational boundary. 2 Systems include physical, biological, organizational, and other entities, and combinations thereof, which can be represented through a common mathematical symbolism. The study of feedback control systems is essentially a study of an important aspect of systems engineering and its application.
- 3. System Input: The input is the stimulus, excitation or command applied to a control system. Typically from external energy source, usually in order to produce a specified response from the control system. Output: The output is the actual response obtained from a control system. It may or may not be equal to specified response implied by the input. 3
- 4. Control Engineering Control engineering or Control systems engineering is based on the foundations of feedback theory and linear system analysis, and it integrates the concepts of network theory and communication theory. It is the engineering discipline that applies control theory to design systems with predictable behaviors. The practice uses sensors to measure the output performance of the device being controlled (often a vehicle) and those measurements can be used to give feedback to the input actuators that can make corrections toward desired performance. When a device is designed to perform without the need of human inputs for correction it is called automatic control (such as cruise control for regulating a car's speed). Multi-disciplinary in nature, control systems engineering activities focus on implementation of control systems mainly derived by mathematical modeling of systems of a diverse range. 4
- 5. Why Control is important? [for production process/ in plant] (1) Safety: Prevent injury to plant personnel, protect the environment by preventing emission and minimizing waste and prevent damage to the process equipment. (2) Maintain product quality (composition, purity, color, etc.) on a continuous basis and with minimum cost. (3) Maintain plant production rate at minimum cost. So, we can say that the reasons for automation of process plants are to provide safety and at same time maintain desired product quality, high plant throughput, and reduce demand on human labor. 5
- 6. Control System A control system consists of subsystems and processes (or plants) assembled for the purpose of controlling the outputs of the process. A control system is a system capable of monitoring and regulating the operation of a process or a plant. For example, a furnace produces heat as a result of the flow of fuel. In this process, flow of fuel in the input, and heat to be controlled is the output. There are two common classes of control systems, with many variations and combinations: logic or sequential controls, and feedback or linear controls. There is also fuzzy logic, which attempts to combine some of the design simplicity of logic with the utility of linear control. Some devices or systems are inherently not controllable 6
- 7. Advantages of Control System We build control systems for four primary reasons: Power amplification Remote control Convenience of input form Compensation of the disturbances 7
- 8. Analysis and Design Objectives of Control System 8
- 9. Analysis and Design Objectives of Control System 9
- 10. Classification of Control System Controls are classified with respect to: Technique involved to perform control (i.e. human/machines): i) manual control ii) automatic control Time dependence of output variable (i.e. constant/changing): i) regulator / regulating control ii) servo / tracking control) Fundamental structure of the control (i.e. the information used for computing the control): i) Open loop control ii) Feedback control / Closed-loop control 10
- 11. Classification of Control System Manual and Automatic Controls - Examples A system that involves: a person controlling a machine is called manual control. Ex: Driving a car. machines only is called a automatic control. Ex: Central AC Servo/Regulator Controls – Examples An automatic control system designed to: follow a changing reference is called tracking control or a servo. Ex: Remote control car. maintain an output fixed (regardless of the disturbances present) is called a regulating control or a regulator. Ex: Cruise control. 11
- 12. Classification of Control System Open-Loop Control and Feedback control: The structures are fundamentally different: In an open-loop control, the system does NOT measure the actual output and there is no correction to make that output conform to the desired output. An Electric toaster is an open-loop control, Since: The controller is based on the knowledge. The output is not used in control computation. In a closed loop control, the system includes a sensor to measure the output and uses feedback of the sensed value to influence the control input variable. A water tank of an ordinary flush toilet is a (basic) feedback control, since the output is fed back for control computation. 12
- 13. Block Diagram It represents the structure of a control system. It helps to organize the variables and equations representing the control system. It is composed of: – boxes, that represents the components of the system including their causality; – Lines with arrows that represents the actual dynamic variables, such as speed, pressure, velocity, etc. 13
- 14. A simple open-loop Block Diagram example 14 Spring/mass system: System = mass + spring: • Control Input: force u • Output: displacement x(t) • Block diagram; derived using Laplace transforms.
- 15. Types of Block Diagram 15 Block diagrams are of two types: i) Specific Component block diagram ii) Generic Component Block Diagram For the Spring/mass system: Specific Component block diagram Generic Component block diagram
- 16. Definitions of Significant Terms 16 • Process : Component whose the output is to be controlled, Ex: Mass. • Actuator : Device that can influence the control input variable of the process, Ex: Spring. • Plant = actuator + process, Ex: Spring/mass system. • Control input : external variable (signal/action) applied to the plant. • Controller : computes the desired control input variable • Sensor : measures the actual output variable and converts the measured output into an electric signal for use by the controller. • Comparator (or Σ) = computes the difference between the desired and actual output variables to give the controller a measure of the system error. • Input filter = converts the desired output variable to electric form for later manipulation by the controller.
- 17. Open-loop Control System 17 • Open-loop control: An open-loop control is applied to achieve desired system response using a controller or an actuator without feedback. Figure below is the block diagram of it: Features of Open-loop Control: Two outstanding features of open-loop control systems are: 1. Their ability to perform accurately is determined by their calibration. To calibrate means to establish or reestablish the input-output relation to obtain desired system accuracy. 2. They are not usually troubled with problems of instability.
- 18. Example of an Open-loop Control System 18 • An open-loop control system utilizes an actuating device to control the process directly without using feedback. Below are the schematic diagram (a) and block diagram (b) of Open loop speed-control of a rotating disk.
- 19. Advantages of Open-loop Control System 19 The main advantages of an open Loop Production Control System are: • Simplicity: It is simple in construction and design. • Low-cost: It is inexpensive compared to closed loop control systems. • Easy Maintenance: It costs less time and money to maintain. • No measurement: Useful when the production output is impossible or hard to measure. To put it simply, an open loop control system is best for manufacturing processes that do not require output changes, run cheap, and come with little to no ways to quantify the measurement. It should also have a meager chance of disruptions during the production process.
- 20. Disadvantages of Open-loop Control System 20 The main disadvantages of an open Loop Production Control System are: • Can’t handle disruptions: It can hardly handle any major disruptions. • Poor Reliability: It is unreliable as it cannot adapt to uncertainties. • Poor Flexibility: It lacks the flexibility to self-correct and recover from accidental stoppage. • Poor Accuracy: With no feedback system, it is very inaccurate when it needs to reflect the actual manufacturing output.
- 21. Examples of Open-loop Control System 21
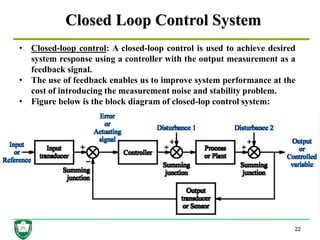
- 22. Closed Loop Control System 22 • Closed-loop control: A closed-loop control is used to achieve desired system response using a controller with the output measurement as a feedback signal. • The use of feedback enables us to improve system performance at the cost of introducing the measurement noise and stability problem. • Figure below is the block diagram of closed-lop control system:
- 23. Example of an Closed-loop Control System 23 A closed-loop control system uses a measurement of the output and feedback of this signal to compare it with the desired output. Below are the schematic diagram (a) and block diagram (b) of Closed loop speed-control of a rotating disk. The system is a negative feedback control system.
- 24. Advantages of Closed-loop Control System 24 • Reliable and Accurate: • It can reflect the actual production state by using feedback as input data. • Flexible and Faster Recovery: • It could recover quicker from disruptions and avoid further damage to production efficiency. • Continuous Improvement: • Collected feedback can be analyzed to streamline the manufacturing process further, saving time and operation costs. • Combat Risk Factors: • System with well designed feedback control can respond to unforeseen events. • Eliminates need for human adjustment: of control variable and reduces human workload. • Gives much better performance than : it is possible with open-loop.
- 25. Disadvantages of Closed-loop Control System 25 • More complex than open-loop control. • May have steady state error. • Depends on accuracy with which you can measure the output. • May cause stability problems. • Required heavy documentation or spreadsheets management. • Software solutions were expensive and exclusive. • Required costly and intensive training for employees.
- 26. Examples of Closed-loop Control System 26
- 27. What is Feedback? 27 • Feedback is that property of a closed-loop system which permits the output (or some other controlled variable) to be compared with the input to the system (or an input to some other internally situated component or subsystem) so that the appropriate control action may be formed as some function of the output and input. • More generally, feedback is said to exist in a system when a closed sequence of cause-and-effect relations exists between system variables.
- 28. Characteristics of Feedback 28 • CHARACTERISTICS OF FEEDBACK: • 1. Increased accuracy: For example, the ability to faithfully reproduce the input. • 2. Reduced sensitivity: of the ratio of output to input to variations in system parameters. • 3. Reduced effects of nonlinearities. • 4. Reduced effects of external disturbances or noise • 5. Increased bandwidth: The bandwidth of a system is a frequency response measure of how well the system responds to (or filters) variations (or frequencies) in the input signal
- 29. Example of a Closed-loop Control System 29 An example of a closed-loop control system is a person steering an automobile (assuming his eyes are open) by looking at the auto’s location on the road and making the appropriate adjustments. A person steering an automobile:
- 30. Example of a Closed-loop Control System 30 Regulate the level of fluid by adjusting the output valve : The input is a reference level of fluid and is memorized by operator. The power amplifier is the operator. The sensor is visual. Operator compares the actual level with the desired level and opens or closes the valve ( actuator) adjusting the fluid flow out, to maintain the desired level. .
- 31. Example of a Closed-loop Control System 31 Temperature Control System: The temperature in the electric furnace is measured by a thermometer. The analog temperature is converted to a digital temperature by an A/D converter. This digital temperature is compared with the programmed input temperature, and if there is any discrepancy (error), the controller sends out a signal to the heater, through an interface, amplifier, and relay, to bring the furnace temperature to a desired value..
- 32. Example of a Closed-loop Control System 32 Temperature Control of passenger compartment of a car: Figure above is a functional block diagram of temperature control of the passenger compartment of a car. Note that the ambient temperature and radiation heat transfer from the sun, which are not constant while the car is driven, act as disturbances.
- 33. Example of a Closed-loop Control System 33 Control System of the National Income: It has become interesting and valuable to attempt to model the feedback processes prevalent in the social, economic, and political spheres.
- 35. Open-loop vs. Closed Loop Control System 35 1. Feedback Element: An advantage of the closed loop control system is the fact that the use of feedback makes the system response relatively insensitive to external disturbances and internal variations in system parameters. It is thus possible to use relatively inaccurate and inexpensive components to obtain the accurate control of a given plant, whereas doing so is impossible in the open-loop case. 2. Stability: From the point of view of stability, the open-loop control system is easier to build because system stability is not a major problem. On the other hand, stability is a major problem in the closed-loop control system, which may tend to overcorrect errors and thereby can cause oscillations of constant or changing amplitude.
- 36. Open-loop vs. Closed Loop Control System 36 3. Cost and Required Power: Note that the output power rating partially determines the cost, weight, and size of a control system. The number of components used in a closed- loop control system is more than that for a corresponding open-loop control system. Thus, the closed-loop control system is generally higher in cost and power. To decrease the required power of a system, open-loop control may be used where applicable. When to use open-loop: It should be emphasized that for systems in which the inputs are known ahead of time and in which there are no disturbances it is advisable to use open-loop control. When to use closed-loop: Closed loop control systems have advantages only when unpredictable disturbances and/or unpredictable variations in system components are present. A proper combination of open-loop and closed-loop controls is usually less expensive and will give satisfactory overall system performance.
- 37. Definitions 37 • Servomechanism (often abbreviated as servo). The term is often used to refer to a mechanical system in which the steady-state error is zero for a constant input signal. Sometimes, by generalization, it is used to refer to any feedback control system. • Regulator. This term is used to refer to systems in which there is a constant steady-state output for a constant signal. The name is derived from the early speed and voltage controls, called speed and voltage regulators • Command input: The motivating input signal to the system, which is independent of the output of the system and exercises complete control over it (if the system is completely controllable). • Reference selector (reference input element). The unit that establishes the value of the reference input. The reference selector is calibrated in terms of the desired value of the system output.
- 38. Definitions 38 • Reference input. The reference signal produced by the reference selector, i.e., the command expressed in a form directly usable by the system. It is the actual signal input to the control system. • Disturbance input. An external disturbance input signal to the system that has an unwanted effect on the system output. • Forward element (system dynamics): The unit that reacts to an actuating signal to produce a desired output. This unit does the work of controlling the output and thus may be a power amplifier. Feedback element: The unit that provides the means for feeding back the output quantity, or a function of the output, in order to compare it with the reference input.
- 39. Definitions 39 • Output (controlled variable). The quantity that must be maintained at a prescribed value, i.e., following the command input without responding the disturbance inputs. • Actuating signal. = Reference input – feedback signal. It is the input to the control unit that causes the output to have the desired value. • The fundamental difference between the open-and closed-loop systems is the feedback action, which may be continuous or discontinuous. In one form of discontinuous control the input and output quantities are periodically sampled and discontinuous. Continuous control implies that the output is continuously fed back and compared with the reference input compared; i.e., the control action is discontinuous in time. This is commonly called a digital, discrete-data or sampled-data feedback control system.
- 40. 40