2018/12/28 LiDARで取得した道路上点群に対するsemantic segmentation
11 likes8,908 views

LiDARで取得した道路上の点群に対してSemantic Segmentationを行う手法についてサーベイしました。











![LiDARを用いたSemantic Segmentation
[Hackel2016]Hackel,T.,Wegner, J. D., & Schindler, K. (2016). FAST
SEMANTIC SEGMENTATION of 3D POINT CLOUDS with
STRONGLYVARYING DENSITY. ISPRS Annals of the Photogrammetry,
Remote Sensing and Spatial Information Sciences, 3(July)
[Thomas2018] Thomas, H., & Marcotegui, J. D. B. (2018). Semantic
Classification of 3D Point Clouds with Multiscale Spherical
Neighborhoods. International Conference on 3DVision (3DV).
[Tchapmi2017]Tchapmi, L. P., Choy, C. B.,Armeni, I., Gwak, J., &
Savarese, S. (2017). SEGCloud : Semantic Segmentation of 3D Point
Clouds. In International Conference of 3DVision (3DV).
[Dewan2017] Dewan,A., Oliveira, G. L., & Burgard,W. (2017). Deep
Semantic Classification for 3D LiDAR Data. In International Conference
on Intelligent Robots and Systems.
[Boulch2017]Boulch,A., Saux, B. Le, & Audebert, N. (2017).
Unstructured point cloud semantic labeling using deep segmentation
networks. In EurographicsWorkshop on 3D Object Retrieval.](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-13-320.jpg)
![LiDARを用いたSemantic Segmentation
[Roynard2018] Roynard, X., Deschaud, J., Goulette, F., Roynard, X.,
Deschaud, J., Goulette, F., … Goulette, F. (2018). Classification of Point
Cloud Scenes with MultiscaleVoxel Deep Network. ArXiv, 1804.03583.
[Landrieu2018]Landrieu, L., & Simonovsky, M. (2018). Large-scale Point
Cloud Semantic Segmentation with Superpoint Graphs. IEEE Conference
on ComputerVision and Pattern Recognition.
[Wu2018]Wu, B.,Wan,A.,Yue, X., & Keutzer, K. (2018). SqueezeSeg:
Convolutional Neural Nets with Recurrent CRF for Real-Time Road-
Object Segmentation from 3D LiDAR Point Cloud. IEEE International
Conference on Robotics and Automation (ICRA).
[Wu2018_2] Wu, B., Zhou, X., Zhao, S.,Yue, X., Keutzer, K., & Berkeley, U. C.
(2018). SqueezeSegV2 : Improved Model Structure and Unsupervised
Domain Adaptation for Road-Object Segmentation from a LiDAR Point
Cloud.
[Ye2018]Ye, X., Li, J., Du, L., & Zhang, X. (2018). 3D Recurrent Neural
Networks with Context Fusion for Point Cloud Semantic Segmentation. In
European Conference on ComputerVision.](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-14-320.jpg)
![[Hackel2016]TMLC-MSR (1/2)
点群をマルチスケール化し、各スケールで近傍点を設定することで、
密度の異なる点群を高速に処理
1. 点群をマルチスケールでVoxel Filter
2. 各スケールで各点のk近傍(k=10程度)と、その固有値/固有ベクトル
算出
3. 各スケールで特徴量(下表+SHOT/3D Shape Context)を算出
4. Random Forestで各点を識別
SHOT / 3D Shape Context](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-15-320.jpg)
![[Hackel2016]TMLC-MSR (2/2)
Paris-Rue-CasseteおよびParis-Rue-Madameで評価](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-16-320.jpg)
![[Thomas2018]RF-MSSF (1/2)
TMLC-MSRではマルチスケールのk近傍を求めていたが、
それをk-NNの代わりにマルチスケールの球の中にあるk
個のサンプルを使用する形に変更
形状の特徴がより適切に取得できる](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-17-320.jpg)
![[Thomas2018]RF-MSSF (2/2)
評価結果](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-18-320.jpg)
![[Tchapmi2017]SEGCloud (1/3)
Fully Convolutional Neural Networkによる推定能力に、
Trilinear Interpolation(TI)とCRFを組み合わせ、細部での
性能向上
Voxel化した点群に対し3D FCNNでラベル割り当て
TIでVoxelについたラベルを点群へ変換し、3D CRFで最終ラベ
ルを調整](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-19-320.jpg)
![[Tchapmi2017]SEGCloud (2/3)
3D FCNN
点群をVoxel化し、OccupancyチャネルとRGBやIntensityなどのチャネ
ルに対して3次元畳み込み
Trilinear Interpolation
各点のラベルを周囲の8近
傍ボクセルのラベルスコア
の重み付き和で決定](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-20-320.jpg)
![[Tchapmi2017]SEGCloud (3/3)
Semantic3Dで評価](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-21-320.jpg)
![[Dewan2017]Deep Semantic Classification
for LiDAR Data (1/4)
点群をMovable, Non-movable, Dynamic(今動いている)の
3タイプにラベル付け
点群を3チャネルの画像(デプス、高さ、輝度)へ投影し、
CNN(Fast-Net)でObjectnessを判別
2枚の点群からRigid flowを用いて、点ごとの動き(6自由度)を
推定
Objectnessと点の動きをもとにBayes Filterでラベル推定](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-22-320.jpg)
![[Dewan2017]Deep Semantic Classification
for LiDAR Data (2/4)
Fast-Net
Oliveira, G. L., Burgard,W., & Brox,T. (2016). Efficient Deep
Models for Monocular Road Segmentation. In International
Conference on Intelligent Robots and Systems.
Rigid Flow
Dewan,A., Caselitz,T.,Tipaldi, G. D., & Burgard,W. (2016). Rigid
Scene Flow for 3D LiDAR Scans. In International Conference on
Intelligent Robots and Systems.
2つのPoint Cloud間で以下の𝜙を最大化するように各点の6自
由度の動き𝝉𝑖を算出
近傍点の動きの差を小さく
2つの点群の対応点の
特徴が近くなるように](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-23-320.jpg)
![[Dewan2017]Deep Semantic Classification
for LiDAR Data (3/4)
Bayes Filter
時刻𝑡において、各点がラベル𝑥𝑡 = ሼ
ሽ
dynamic, movable, non −
movable をとる確率分布を求める
動き Objectness物体かどうかラベル
それぞれモデル化(元論文参照)
前フレームの情報を伝播させることで逐次的に計算可能](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-24-320.jpg)
![[Dewan2017]Deep Semantic Classification
for LiDAR Data (4/4)
KITTI 3D Object Detection Benchmark
物体ラベルからMovableとNon-Movableラベルを取得
点群にMovable、Non-Movable、Dynamicラベルを付与したデータセット
Ayush Dewan,Tim Caselitz, Gian Diego Tipaldi, and Wolfram
Burgard.Motion-based detection and tracking in 3d lidar scans. In IEEE
International Conference on Robotics and Automation (ICRA), 2016.](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-25-320.jpg)
![[Boulch2017]SnapNet (1/2)
点群を複数の画像に落とし込み、CNNによってセグメン
テーションする手法
1. 点群をメッシュ化
2. ランダムにカメラ位置と向きを複数設定し、RGB画像とデプ
スやノイズ、法線情報などをもとにしたComposite画像を生
成
3. 複数画像に対してSegnetやUnetなどをもとにSemantic
Segmentation
4. Segmentationした結果を点群に戻す](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-26-320.jpg)
![[Boulch2017]SnapNet (2/2)](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-27-320.jpg)
![[Roynard2018]Multiscale Voxel Deep
Network (1/2)
ラベルごとの点の数の不均衡を是正することで精度向上
各エポックごとに、各クラスからN個の点をランダムサンプリングして、
シャッフル
サンプリングした点を中心にその周辺をマルチスケールでボクセル
グリッド化し、畳み込み](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-28-320.jpg)
![[Roynard2018]Multiscale Voxel Deep
Network (2/2)](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-29-320.jpg)
![[Landrieu2018]SPGraph (1/4)
巨大な点群に対し、Superpoint graph (SPG)と呼ばれる構造を
用いて効率的にSemantic Segmentation
1. 点群同士をHand-craftedな特徴を用いてSegmentation
(Superpoint)
2. Superpoint間のエッジを生成(点群のVoronoi隣接グラフから)
3. 各Superpointに対しPointNetでラベルを付与
4. Gated Recurrent Unit (GRU)を用いて、グラフ間でメッセージを伝
播することで、コンテクストを考慮した最終的なラベルを算出](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-30-320.jpg)
![[Landrieu2018]SPGraph (2/4)
Superpointの作成
1. 各点から10近傍を結んでグラフを作成
2. 各点からHand-craftedな特徴(Linearity, Planarity, scattering +
vertical feature, elevation)を算出
3. 以下の式を𝑙0-cut pursuit algorithmで最小化することで、グ
ラフを切断し、Superpointとその特徴を作成
argmin
𝑔∈ℝ 𝑑𝑔
𝑖∈𝐶
𝑔𝑖 − 𝑓𝑖
2
+ 𝜇
(𝑖,𝑗)∈𝐸 𝑛𝑛
𝑤𝑖,𝑗 𝑔𝑖 − 𝑔𝑗 ≠ 0
Superedgeの作成
入力点群からVoronoi隣接グラフを作り、もし2つのSuperpoint
間に点同士のエッジが存在するなら、そのSuperedgeを作成
Superppoint間のエッジに13次元特徴量
Superpoint特徴
点の特徴
エッジの距離に
反比例した重み
隣り合うノードが
同じ特徴なら0](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-31-320.jpg)
![[Landrieu2018]SPGraph (3/4)
Superedgeの特徴量
GRU
隣接ノードとエッジの特徴量からメッセージを生成
隣接ノードからのメッセージと現ノードの特徴量から、入力
ゲート、更新ゲート、忘却ゲートなどを使用してSuperpointの特
k超量を更新
ラベルの予測は過去のすべてのSuperpointの特徴量をもとに
行う](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-32-320.jpg)
![[Landrieu2018]SPGraph (4/4)](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-33-320.jpg)
![[Wu2018]SqueezeSeg (1/3)
End-to-Endに学習可能な高速かつ高精度なネットワーク
LiDARデータをシリンダ上に投影し、画像(x,y,z,intensity,rangeの5
チャネル)として扱う
画像をSqueezeNetで解析することにより、精度を維持しつつ高速処
理
CRF as RNNを用いてSegmentationの精度を向上](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-34-320.jpg)
![[Wu2018]SqueezeSeg (2/3)
FireModuleおよびFireDeconvモジュールで1x1 Convを使
用してチャネル数と3x3 kernelの数を減らすことで高速に
畳み込み(FireDeconvモジュールでアップサンプリング)
RNNでデータ項を予測ラベル、平滑化項を周辺との特徴
量差分とした平均場近似を算出し、ラベル修正
ソースコード
https://github.com/BichenWuUCB/SqueezeSeg](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-35-320.jpg)
![[Wu2018]SqueezeSeg (3/3)
実験
KITTI 3D Object Detection DatasetからSegmentaion用データ
セットを作成
Titan X GPUでCRFありで13.5ms、なしで8.7ms](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-36-320.jpg)
![[Wu2018_2]SqueezeSeg V2 (1/4)
SqueezeSegを以下の改良により6.0-8.6%の精度向上
Context Aggregation Module (CAM)でDropout Noiseに頑健
に
Focal Loss、Batch Normalization、LiDAR mask channelで精度
向上
ゲーム(CG)動画からのDomain Adaptation](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-37-320.jpg)
![[Wu2018_2]SqueezeSeg V2 (2/4)
Context Aggregation Module (CAM)
LiDARで取得した点群にはセンサーのレンジや鏡、ジッタなどのノイ
ズが多い(Dropout Noise)
大きいサイズのMax Poolingを使用して穴埋め
Focal Loss
学習データの不均衡(ほとんど点が背景)を是正するために、Cross
Entropy Lossから変更
𝐹𝐿 𝑝𝑡 = − 1 − 𝑝𝑡
𝛾
log 𝑝𝑡
Batch Normalizationを各畳み込み層に挿入
データの欠損した領域のマスク(LiDAR Mask)を入力チャネル
に追加
Context Aggregation Module](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-38-320.jpg)
![[Wu2018_2]SqueezeSeg V2 (3/4)
Domain Adaptation
CGではIntensityのデータが
ないため、x、y、z、depthから
推定するネットワークを
Unlabelな実データで学習し、
CGデータで推論(a)
CG DataにIntensityを加えて
Focal LossにGeodesic Loss
(実データバッチとCGバッチ
との出力分布の距離)を加え
て学習(b)
各層の偏りをなくすため、
Unlabelな実データを入力とし、
下の階層から平均0分散1と
なるように Batch
Normalizationのパラメータを
更新していく(c)](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-39-320.jpg)
![[Wu2018_2]SqueezeSeg V2 (4/4)
KITTIから作成したデータセットを用いて評価](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-40-320.jpg)
![[Ye2018]3D RNN with Context Fusion (1/4)
end-to-endで局所的な空間構造および大局的なコンテクスト両
方を考慮したSemantic Segmentationを学習
1. 空間内を床面と平行にブロック(マルチスケール)へ分割
2. Pointwise Pyramid Poolingで、MLPで求めた点の特徴を統合
してブロックの特徴を算出し、点とブロックの特徴を結合
3. Two-direction RNNによって空間全体のコンテクストを学習/
認識
4. 2と3それぞれの特徴を統合し、各点のラベルを算出](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-41-320.jpg)
![[Ye2018]3D RNN with Context Fusion (2/4)
Pointwise Pyramid Pooling
PointNetと同様にMLPで各点ごとに特徴量を取得済み
各点を中心にマルチスケールにPoolingして統合
近傍計算をマルチサイズのCuboidを用いて近似
スケールに合わせた数の点をCuboid内でランダムサンプリン
グしてPooling](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-42-320.jpg)
![[Ye2018]3D RNN with Context Fusion (3/4)
Two-Direction RNN
点ごとにMLPで求めた特徴と、Pointwise Pyramid Pooling
で求めた特徴を結合したものを入力
ブロック単位で、まずはx方向のRNN、次はy方向のRNN
を用いることで、コンテクストの情報を学習
RNNで取得した特徴量をもとにMLPでラベル付与](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-43-320.jpg)
![[Ye2018]3D RNN with Context Fusion (4/4)
vKITTIでの結果
KITTIでの結果例](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-44-320.jpg)

![点群に対する畳み込みニューラルネットワーク
ここでは重要、または屋外環境に適応した事例があるものに絞って紹
介します。
[Qi2017]Qi, C. R., Su, H., Mo, K., & Guibas, L. J. (2017). PointNet :
Deep Learning on Point Sets for 3D Classification and Segmentation
Big Data + Deep Representation Learning. IEEE Conference on
ComputerVision and Pattern Recognition.
[Qi2017_2]Qi, C. R.,Yi, L., Su, H., & Guibas, L. J. (2017). PointNet++:
Deep Hierarchical Feature Learning on Point Sets in a Metric Space.
Conference on Neural Information Processing Systems.
[Tatarchenko2018]Tatarchenko, M., Park, J., Koltun,V., & Zhou, Q.
(2018).Tangent convolutions for dense prediction in 3D. IEEE
Conference on ComputerVision and Pattern Recognition.
[Wang2018]Wang, S., Suo, S., Ma,W., & Urtasun, R. (2018). Deep
Parametric Continuous Convolutional Neural Networks. IEEE
Conference on ComputerVision and Pattern Recognition](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-46-320.jpg)
![[Qi2017]PointNet (1/2)
47
各点群の点を独立に畳み込む
Global Max Poolingで点群全体の特徴量を取得
T-Netによって点群を回転させて正規化
コード:
https://github.com/charlesq34/pointnet
各点を個別
に畳み込み
アフィン変換
各点の特徴を統合](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-47-320.jpg)
![[Qi2017]PointNet (2/2)
T-NetはLoss関数に以下のような正規化項を用いること
で、直行行列に近くなるよう変換行列を学習
𝐿 𝑟𝑒𝑔 = 𝑰 − 𝑨𝑨 𝑇
𝐹
2
Segmentationは各点
ごとの特徴に、
Global Max Pooling
によって取得した全
体特徴を結合した特
徴に対して行う](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-48-320.jpg)
![[Qi2017_2]PointNet++ (1/2)
49
PointNetを階層的に適用
点群をクラスタ分割→PointNet→クラスタ内で統合を繰り返す
Segmentationの各点の特徴量は周辺の点から補間し、対応する
set abstraction層の出力と結合
k近傍の特徴量に対し、距離に応じた重み付き和](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-49-320.jpg)
![[Qi2017_2]PointNet++ (2/2)
点群の分割
Farthest Point Samplingでサンプリングし、半径r内の点全部
(上限K)を1つのPoint Setとする(オーバーラップあり)
PointNetに入力される各Point Set内の点は、セントロイドを原
点とする座標に変換されてから入力
Grouping
異なる密度の点群に対応するため、
異なるスケール(半径r)で取得した
PointNet特徴を結合(MSG)、また
は異なる層のPointNet特徴を結合
(MRG)する
コード
https://github.com/charlesq34/point
net](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-50-320.jpg)
![[Tatarchenko2018]Tangent Convolutions
(1/3)
51
巨大な点群に対しても適用可能
点群以外の3Dデータフォーマットにも適用可能
Tangent Convolutions
点pの接平面(tangent plane)に近傍点を投影
接平面を画像とみなし、画素を最近傍やGaussianで補間
入力を𝑁 × 𝐿 × 𝐶𝑖𝑛として1 × 𝐿のカーネルで畳み込む
𝑁:点の数、 𝐿:接平面を1次元にした長さ( = 𝑙2 )、 𝐶𝑖𝑛:チャネル数
近傍点の接平面への投影
投影接平面
画像
最近傍で補
間
混合ガウス
補間
Top-3近傍で
混合ガウス補
間](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-51-320.jpg)
![[Tatarchenko2018]Tangent Convolutions
(2/3)
計算の効率化のため、以下を事前計算
接平面の各位置𝒖に対する近傍点𝑔𝑖 𝒖 を事前計算
接平面の各位置𝒖における値𝑆 𝒖 を決定するために、 𝑔𝑖 𝒖 の距
離に応じた重み𝑤𝑖 𝒖
Pooling
3D Gridに点群を分割し、Grid内でAverage Pooling
ネットワーク構造](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-52-320.jpg)
![[Tatarchenko2018]Tangent Convolutions
(3/3)
ソースコード
https://github.com/tatarchm/tangent_conv
D: Depth
H: Height
N: Normal
RGB: Red Green Blue](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-53-320.jpg)
![[Wang2018]Deep Parametric Continuous
CNN
カーネルを離散ではなく、パラメトリックな連続関数として表現
(ここではMulti-Layer Perceptron)
任意の構造の入力に対して、任意の個所の出力が計算可能
ℎ 𝑛 =
𝑚=−𝑀
𝑀
𝑓 𝑛 − 𝑚 𝑔[𝑚] ℎ 𝒙 = න
−∞
∞
𝑓 𝒚 𝑔 𝒙 − 𝒚 ⅆ𝑦 ≈
𝑖
𝑁
1
𝑁
𝑓 𝒚𝑖 𝑔(𝒙 − 𝒚𝑖)
連続カーネル離散カーネル](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-54-320.jpg)
![[Wang2018]Deep Parametric Continuous
CNN
Continuous Convolution Layer
各点の
k近傍
k近傍
点座標
近傍点への
カーネル重み
畳み込み
Semantic Segmentation Network](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-55-320.jpg)
![[Wang2018]Deep Parametric Continuous
CNN
車両の屋根に搭載したVelodyne-64で取得したデータセットに
対して評価](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-56-320.jpg)

![付録
[Zehng2015]Zehng, S., Jayasumana, S., Romera-Paredes, B.,
Vineet,V., Su, Z., Du, D., …Torr, P. H. S. (2015). Conditional
Random Fields as Recurrent Neural Networks. In IEEE
Conference on ComputerVision and Pattern Recognition.
[Iandola2016]Iandola, F. N., Han, S., Moskewicz, M.W.,
Ashraf, K., Dally,W. J., & Keutzer, K. (2016). SqueezeNet:
AlexNet-level accuracy with 50x fewer parameters and
<0.5MB model size. ArXiv, 1602.07360.](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-58-320.jpg)
![[Zheng2015]CRF as RNN
Fully Connected CRFの平均場近似による学習と等価なRNNを構築
特徴抽出部分にFCN(Fully Convolutional Networks)を用いることで、
end to endで誤差逆伝播法による学習が行えるネットワークを構築
平均場近似の一回のIterationを表すCNN
ネットワークの全体像
ソースコード
https://github.com/torrvisi
on/crfasrnn (Caffe)](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-59-320.jpg)
![[Iandola2016]SqueezeNet
AlexNetと同等の性能を1/510のパラメータサイズで実現
畳み込み処理を、1x1畳み込みでチャネル数を減らし
(squeeze)、3x3と1x1畳み込みを併用する(expand)ことでカー
ネルサイズを減らすことで、全体のパラメータ数削減
Downsample(PoolingやStride>1の畳み込み)を後ろの層で行
うことで精度向上](https://image.slidesharecdn.com/20181228lidarsemanticsegsurvey-190108044055/85/2018-12-28-LiDAR-semantic-segmentation-60-320.jpg)











![[DL輪読会]Dense Captioning分野のまとめ](https://cdn.slidesharecdn.com/ss_thumbnails/dlseminar-201202012355-thumbnail.jpg?width=560&fit=bounds)
![SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss1ssii2022hkatoneural3drepresentationhiroharukato-220607054619-fadc6480-thumbnail.jpg?width=560&fit=bounds)








![[DL輪読会]Learning Transferable Visual Models From Natural Language Supervision](https://cdn.slidesharecdn.com/ss_thumbnails/dlkobayashi0115-210115012308-thumbnail.jpg?width=560&fit=bounds)


![[DL輪読会]GQNと関連研究,世界モデルとの関係について](https://cdn.slidesharecdn.com/ss_thumbnails/20180817-180827085537-thumbnail.jpg?width=560&fit=bounds)

![[DL輪読会]PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metr...](https://cdn.slidesharecdn.com/ss_thumbnails/181214dlpointnet-181214053349-thumbnail.jpg?width=560&fit=bounds)



Ad
More Related Content
What's hot (20)
Similar to 2018/12/28 LiDARで取得した道路上点群に対するsemantic segmentation (20)


















Ad
More from Takuya Minagawa (16)
















Ad
2018/12/28 LiDARで取得した道路上点群に対するsemantic segmentation
- 2. 自己紹介 2 株式会社ビジョン&ITラボ 代表取締役 皆川 卓也(みながわ たくや) 「コンピュータビジョン勉強会@関東」主催 博士(工学) 略歴: 1999-2003年 日本HP(後にアジレント・テクノロジーへ分社)にて、ITエンジニアとしてシステム構築、プリ セールス、プロジェクトマネジメント、サポート等の業務に従事 2004-2009年 コンピュータビジョンを用いたシステム/アプリ/サービス開発等に従事 2007-2010年 慶應義塾大学大学院 後期博士課程にて、コンピュータビジョンを専攻 単位取得退学後、博士号取得(2014年) 2009年-現在 フリーランスとして、コンピュータビジョンのコンサル/研究/開発等に従事(2018年法人化) お問い合わせ:http://visitlab.jp
- 3. 本資料について 本資料は主にLiDARから取得した道路上の点群データ に対しSemantic Segmentationを行う技術について行いま した。 点群に対するSemantic Segmentationは歴史も古く、論文 数もとても多いため、主に以下の観点で選定した研究を 紹介します。 ここ数年の比較的新しいアプローチ 屋外や道路環境を想定したもの 有名会議/論文誌で発表されたもの 引用数が多いもの ベンチマークで好成績
- 4. 点群に対するSemantic Segmentation 今回調査した内容: データセット LiDARで取得したデータに対するSemantic Segmentation 点群に対する畳み込みニューラルネットワーク 汎用的に使うことを目的にしてますが、主要なものと屋外を対 象としたものを紹介
- 5. 関連資料 LiDAR-Camera Fusionによる道路上の物体検出サーベイ https://www.slideshare.net/takmin/object-detection-with- lidarcamera-fusion-survey-updated LiDARによる道路上の物体検出サーベイ https://www.slideshare.net/takmin/20181130-lidar-object- detection-survey
- 6. データセット Oakland 3D Point Cloud Dataset Munoz, D., Bagnell, J.A.,Vandapel, N., & Hebert, M. (2009). Contextual Classification with Functional Max-Margin Markov Networks. In IEEE Conference on ComputerVision and Pattern Recognition. Paris-rue-Madame Serna,A., Marcotegui, B., Goulette, F., & Deschaud, J.-E. (2014). Paris- rue-Madame database : a 3D mobile laser scanner dataset for benchmarking urban detection , segmentation and classification methods. In International Conference on Pattern Recognition Applications and Methods (ICPRAM). IQmulus Bredif, M.,Vallet, B., Serna,A., Marcotegui, B., & Paparoditis, N. (2015). TERRAMOBILITA/IQMULUS URBAN POINT CLOUD ANALYSIS BENCHMARK. Computers and Graphics, 49, 126–133.
- 7. データセット Semantic 3D Hackel,T., Savinov, N., Ladicky, L.,Wegner, J. D., Schindler, K., & Pollefeys, M. (2017). SEMANTIC3D.NET:A New Large-Scale Point Cloud Classification. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, IV-1-W1, 91– 98. Paris-Lille-3D Roynard, X., Deschaud, J., & Goulette, F. (2018). Paris-Lille-3D : a large and high-quality ground truth urban point cloud dataset for automatic segmentation and classification. In IEEE Conference on ComputerVision and Pattern Recognition Workshop
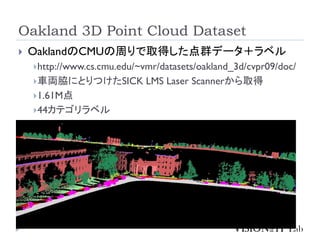
- 8. Oakland 3D Point Cloud Dataset OaklandのCMUの周りで取得した点群データ+ラベル http://www.cs.cmu.edu/~vmr/datasets/oakland_3d/cvpr09/doc/ 車両脇にとりつけたSICK LMS Laser Scannerから取得 1.61M点 44カテゴリラベル
- 9. Paris-rue-Madame パリのrue-Madameの約160mの区間で、 Mobile Laser System(MLS)により取得した点群およびラベル http://www.cmm.mines- paristech.fr/~serna/rueMadameDataset.html 20M点 17クラス Object label Object class
- 10. IQmulus 2013年ParisでMobile Laser System(MLS)により取得した 点群およびラベル http://data.ign.fr/benchmarks/UrbanAnalysis/ インスタンスレベルでセグメンテーション 12M点 22クラス
- 11. Semantic 3D 点群のSemantic Segmentationのためのベンチマーク http://www.semantic3d.net/ 固定LiDARで取得 評価用ツールも提供 1660M点 8クラス
- 12. Paris-Lille-3D Mobile Laser System (MLS)を用いてParisとLilleで取得した 点群+ラベルデータセット http://npm3d.fr/paris-lille-3d 全長1940m 143.1M点 50クラス
- 13. LiDARを用いたSemantic Segmentation [Hackel2016]Hackel,T.,Wegner, J. D., & Schindler, K. (2016). FAST SEMANTIC SEGMENTATION of 3D POINT CLOUDS with STRONGLYVARYING DENSITY. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 3(July) [Thomas2018] Thomas, H., & Marcotegui, J. D. B. (2018). Semantic Classification of 3D Point Clouds with Multiscale Spherical Neighborhoods. International Conference on 3DVision (3DV). [Tchapmi2017]Tchapmi, L. P., Choy, C. B.,Armeni, I., Gwak, J., & Savarese, S. (2017). SEGCloud : Semantic Segmentation of 3D Point Clouds. In International Conference of 3DVision (3DV). [Dewan2017] Dewan,A., Oliveira, G. L., & Burgard,W. (2017). Deep Semantic Classification for 3D LiDAR Data. In International Conference on Intelligent Robots and Systems. [Boulch2017]Boulch,A., Saux, B. Le, & Audebert, N. (2017). Unstructured point cloud semantic labeling using deep segmentation networks. In EurographicsWorkshop on 3D Object Retrieval.
- 14. LiDARを用いたSemantic Segmentation [Roynard2018] Roynard, X., Deschaud, J., Goulette, F., Roynard, X., Deschaud, J., Goulette, F., … Goulette, F. (2018). Classification of Point Cloud Scenes with MultiscaleVoxel Deep Network. ArXiv, 1804.03583. [Landrieu2018]Landrieu, L., & Simonovsky, M. (2018). Large-scale Point Cloud Semantic Segmentation with Superpoint Graphs. IEEE Conference on ComputerVision and Pattern Recognition. [Wu2018]Wu, B.,Wan,A.,Yue, X., & Keutzer, K. (2018). SqueezeSeg: Convolutional Neural Nets with Recurrent CRF for Real-Time Road- Object Segmentation from 3D LiDAR Point Cloud. IEEE International Conference on Robotics and Automation (ICRA). [Wu2018_2] Wu, B., Zhou, X., Zhao, S.,Yue, X., Keutzer, K., & Berkeley, U. C. (2018). SqueezeSegV2 : Improved Model Structure and Unsupervised Domain Adaptation for Road-Object Segmentation from a LiDAR Point Cloud. [Ye2018]Ye, X., Li, J., Du, L., & Zhang, X. (2018). 3D Recurrent Neural Networks with Context Fusion for Point Cloud Semantic Segmentation. In European Conference on ComputerVision.
- 15. [Hackel2016]TMLC-MSR (1/2) 点群をマルチスケール化し、各スケールで近傍点を設定することで、 密度の異なる点群を高速に処理 1. 点群をマルチスケールでVoxel Filter 2. 各スケールで各点のk近傍(k=10程度)と、その固有値/固有ベクトル 算出 3. 各スケールで特徴量(下表+SHOT/3D Shape Context)を算出 4. Random Forestで各点を識別 SHOT / 3D Shape Context
- 19. [Tchapmi2017]SEGCloud (1/3) Fully Convolutional Neural Networkによる推定能力に、 Trilinear Interpolation(TI)とCRFを組み合わせ、細部での 性能向上 Voxel化した点群に対し3D FCNNでラベル割り当て TIでVoxelについたラベルを点群へ変換し、3D CRFで最終ラベ ルを調整
- 20. [Tchapmi2017]SEGCloud (2/3) 3D FCNN 点群をVoxel化し、OccupancyチャネルとRGBやIntensityなどのチャネ ルに対して3次元畳み込み Trilinear Interpolation 各点のラベルを周囲の8近 傍ボクセルのラベルスコア の重み付き和で決定
- 22. [Dewan2017]Deep Semantic Classification for LiDAR Data (1/4) 点群をMovable, Non-movable, Dynamic(今動いている)の 3タイプにラベル付け 点群を3チャネルの画像(デプス、高さ、輝度)へ投影し、 CNN(Fast-Net)でObjectnessを判別 2枚の点群からRigid flowを用いて、点ごとの動き(6自由度)を 推定 Objectnessと点の動きをもとにBayes Filterでラベル推定
- 23. [Dewan2017]Deep Semantic Classification for LiDAR Data (2/4) Fast-Net Oliveira, G. L., Burgard,W., & Brox,T. (2016). Efficient Deep Models for Monocular Road Segmentation. In International Conference on Intelligent Robots and Systems. Rigid Flow Dewan,A., Caselitz,T.,Tipaldi, G. D., & Burgard,W. (2016). Rigid Scene Flow for 3D LiDAR Scans. In International Conference on Intelligent Robots and Systems. 2つのPoint Cloud間で以下の𝜙を最大化するように各点の6自 由度の動き𝝉𝑖を算出 近傍点の動きの差を小さく 2つの点群の対応点の 特徴が近くなるように
- 24. [Dewan2017]Deep Semantic Classification for LiDAR Data (3/4) Bayes Filter 時刻𝑡において、各点がラベル𝑥𝑡 = ሼ ሽ dynamic, movable, non − movable をとる確率分布を求める 動き Objectness物体かどうかラベル それぞれモデル化(元論文参照) 前フレームの情報を伝播させることで逐次的に計算可能
- 25. [Dewan2017]Deep Semantic Classification for LiDAR Data (4/4) KITTI 3D Object Detection Benchmark 物体ラベルからMovableとNon-Movableラベルを取得 点群にMovable、Non-Movable、Dynamicラベルを付与したデータセット Ayush Dewan,Tim Caselitz, Gian Diego Tipaldi, and Wolfram Burgard.Motion-based detection and tracking in 3d lidar scans. In IEEE International Conference on Robotics and Automation (ICRA), 2016.
- 26. [Boulch2017]SnapNet (1/2) 点群を複数の画像に落とし込み、CNNによってセグメン テーションする手法 1. 点群をメッシュ化 2. ランダムにカメラ位置と向きを複数設定し、RGB画像とデプ スやノイズ、法線情報などをもとにしたComposite画像を生 成 3. 複数画像に対してSegnetやUnetなどをもとにSemantic Segmentation 4. Segmentationした結果を点群に戻す
- 28. [Roynard2018]Multiscale Voxel Deep Network (1/2) ラベルごとの点の数の不均衡を是正することで精度向上 各エポックごとに、各クラスからN個の点をランダムサンプリングして、 シャッフル サンプリングした点を中心にその周辺をマルチスケールでボクセル グリッド化し、畳み込み
- 30. [Landrieu2018]SPGraph (1/4) 巨大な点群に対し、Superpoint graph (SPG)と呼ばれる構造を 用いて効率的にSemantic Segmentation 1. 点群同士をHand-craftedな特徴を用いてSegmentation (Superpoint) 2. Superpoint間のエッジを生成(点群のVoronoi隣接グラフから) 3. 各Superpointに対しPointNetでラベルを付与 4. Gated Recurrent Unit (GRU)を用いて、グラフ間でメッセージを伝 播することで、コンテクストを考慮した最終的なラベルを算出
- 31. [Landrieu2018]SPGraph (2/4) Superpointの作成 1. 各点から10近傍を結んでグラフを作成 2. 各点からHand-craftedな特徴(Linearity, Planarity, scattering + vertical feature, elevation)を算出 3. 以下の式を𝑙0-cut pursuit algorithmで最小化することで、グ ラフを切断し、Superpointとその特徴を作成 argmin 𝑔∈ℝ 𝑑𝑔 𝑖∈𝐶 𝑔𝑖 − 𝑓𝑖 2 + 𝜇 (𝑖,𝑗)∈𝐸 𝑛𝑛 𝑤𝑖,𝑗 𝑔𝑖 − 𝑔𝑗 ≠ 0 Superedgeの作成 入力点群からVoronoi隣接グラフを作り、もし2つのSuperpoint 間に点同士のエッジが存在するなら、そのSuperedgeを作成 Superppoint間のエッジに13次元特徴量 Superpoint特徴 点の特徴 エッジの距離に 反比例した重み 隣り合うノードが 同じ特徴なら0
- 32. [Landrieu2018]SPGraph (3/4) Superedgeの特徴量 GRU 隣接ノードとエッジの特徴量からメッセージを生成 隣接ノードからのメッセージと現ノードの特徴量から、入力 ゲート、更新ゲート、忘却ゲートなどを使用してSuperpointの特 k超量を更新 ラベルの予測は過去のすべてのSuperpointの特徴量をもとに 行う
- 34. [Wu2018]SqueezeSeg (1/3) End-to-Endに学習可能な高速かつ高精度なネットワーク LiDARデータをシリンダ上に投影し、画像(x,y,z,intensity,rangeの5 チャネル)として扱う 画像をSqueezeNetで解析することにより、精度を維持しつつ高速処 理 CRF as RNNを用いてSegmentationの精度を向上
- 35. [Wu2018]SqueezeSeg (2/3) FireModuleおよびFireDeconvモジュールで1x1 Convを使 用してチャネル数と3x3 kernelの数を減らすことで高速に 畳み込み(FireDeconvモジュールでアップサンプリング) RNNでデータ項を予測ラベル、平滑化項を周辺との特徴 量差分とした平均場近似を算出し、ラベル修正 ソースコード https://github.com/BichenWuUCB/SqueezeSeg
- 36. [Wu2018]SqueezeSeg (3/3) 実験 KITTI 3D Object Detection DatasetからSegmentaion用データ セットを作成 Titan X GPUでCRFありで13.5ms、なしで8.7ms
- 37. [Wu2018_2]SqueezeSeg V2 (1/4) SqueezeSegを以下の改良により6.0-8.6%の精度向上 Context Aggregation Module (CAM)でDropout Noiseに頑健 に Focal Loss、Batch Normalization、LiDAR mask channelで精度 向上 ゲーム(CG)動画からのDomain Adaptation
- 38. [Wu2018_2]SqueezeSeg V2 (2/4) Context Aggregation Module (CAM) LiDARで取得した点群にはセンサーのレンジや鏡、ジッタなどのノイ ズが多い(Dropout Noise) 大きいサイズのMax Poolingを使用して穴埋め Focal Loss 学習データの不均衡(ほとんど点が背景)を是正するために、Cross Entropy Lossから変更 𝐹𝐿 𝑝𝑡 = − 1 − 𝑝𝑡 𝛾 log 𝑝𝑡 Batch Normalizationを各畳み込み層に挿入 データの欠損した領域のマスク(LiDAR Mask)を入力チャネル に追加 Context Aggregation Module
- 39. [Wu2018_2]SqueezeSeg V2 (3/4) Domain Adaptation CGではIntensityのデータが ないため、x、y、z、depthから 推定するネットワークを Unlabelな実データで学習し、 CGデータで推論(a) CG DataにIntensityを加えて Focal LossにGeodesic Loss (実データバッチとCGバッチ との出力分布の距離)を加え て学習(b) 各層の偏りをなくすため、 Unlabelな実データを入力とし、 下の階層から平均0分散1と なるように Batch Normalizationのパラメータを 更新していく(c)
- 40. [Wu2018_2]SqueezeSeg V2 (4/4) KITTIから作成したデータセットを用いて評価
- 41. [Ye2018]3D RNN with Context Fusion (1/4) end-to-endで局所的な空間構造および大局的なコンテクスト両 方を考慮したSemantic Segmentationを学習 1. 空間内を床面と平行にブロック(マルチスケール)へ分割 2. Pointwise Pyramid Poolingで、MLPで求めた点の特徴を統合 してブロックの特徴を算出し、点とブロックの特徴を結合 3. Two-direction RNNによって空間全体のコンテクストを学習/ 認識 4. 2と3それぞれの特徴を統合し、各点のラベルを算出
- 42. [Ye2018]3D RNN with Context Fusion (2/4) Pointwise Pyramid Pooling PointNetと同様にMLPで各点ごとに特徴量を取得済み 各点を中心にマルチスケールにPoolingして統合 近傍計算をマルチサイズのCuboidを用いて近似 スケールに合わせた数の点をCuboid内でランダムサンプリン グしてPooling
- 43. [Ye2018]3D RNN with Context Fusion (3/4) Two-Direction RNN 点ごとにMLPで求めた特徴と、Pointwise Pyramid Pooling で求めた特徴を結合したものを入力 ブロック単位で、まずはx方向のRNN、次はy方向のRNN を用いることで、コンテクストの情報を学習 RNNで取得した特徴量をもとにMLPでラベル付与
- 44. [Ye2018]3D RNN with Context Fusion (4/4) vKITTIでの結果 KITTIでの結果例
- 45. 点群に対するニューラルネットワーク ここ数年、点群をディープラーニングで扱うための研究が 増えています。これらの研究はほとんどのケースで Semantic Segmentationに応用可能です。 点群に対するDeep Learningサーベイはこちらが参考になり ます。 三次元点群を取り扱うニューラルネットワークサーベイ (東北大橋本研) https://www.slideshare.net/naoyachiba18/ss-120302579 CVPR2018の点群畳み込み研究まとめ+SPLATNet https://www.slideshare.net/takmin/cvpr2018pointcloudcnnsplatn et
- 46. 点群に対する畳み込みニューラルネットワーク ここでは重要、または屋外環境に適応した事例があるものに絞って紹 介します。 [Qi2017]Qi, C. R., Su, H., Mo, K., & Guibas, L. J. (2017). PointNet : Deep Learning on Point Sets for 3D Classification and Segmentation Big Data + Deep Representation Learning. IEEE Conference on ComputerVision and Pattern Recognition. [Qi2017_2]Qi, C. R.,Yi, L., Su, H., & Guibas, L. J. (2017). PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space. Conference on Neural Information Processing Systems. [Tatarchenko2018]Tatarchenko, M., Park, J., Koltun,V., & Zhou, Q. (2018).Tangent convolutions for dense prediction in 3D. IEEE Conference on ComputerVision and Pattern Recognition. [Wang2018]Wang, S., Suo, S., Ma,W., & Urtasun, R. (2018). Deep Parametric Continuous Convolutional Neural Networks. IEEE Conference on ComputerVision and Pattern Recognition
- 47. [Qi2017]PointNet (1/2) 47 各点群の点を独立に畳み込む Global Max Poolingで点群全体の特徴量を取得 T-Netによって点群を回転させて正規化 コード: https://github.com/charlesq34/pointnet 各点を個別 に畳み込み アフィン変換 各点の特徴を統合
- 48. [Qi2017]PointNet (2/2) T-NetはLoss関数に以下のような正規化項を用いること で、直行行列に近くなるよう変換行列を学習 𝐿 𝑟𝑒𝑔 = 𝑰 − 𝑨𝑨 𝑇 𝐹 2 Segmentationは各点 ごとの特徴に、 Global Max Pooling によって取得した全 体特徴を結合した特 徴に対して行う
- 49. [Qi2017_2]PointNet++ (1/2) 49 PointNetを階層的に適用 点群をクラスタ分割→PointNet→クラスタ内で統合を繰り返す Segmentationの各点の特徴量は周辺の点から補間し、対応する set abstraction層の出力と結合 k近傍の特徴量に対し、距離に応じた重み付き和
- 50. [Qi2017_2]PointNet++ (2/2) 点群の分割 Farthest Point Samplingでサンプリングし、半径r内の点全部 (上限K)を1つのPoint Setとする(オーバーラップあり) PointNetに入力される各Point Set内の点は、セントロイドを原 点とする座標に変換されてから入力 Grouping 異なる密度の点群に対応するため、 異なるスケール(半径r)で取得した PointNet特徴を結合(MSG)、また は異なる層のPointNet特徴を結合 (MRG)する コード https://github.com/charlesq34/point net
- 51. [Tatarchenko2018]Tangent Convolutions (1/3) 51 巨大な点群に対しても適用可能 点群以外の3Dデータフォーマットにも適用可能 Tangent Convolutions 点pの接平面(tangent plane)に近傍点を投影 接平面を画像とみなし、画素を最近傍やGaussianで補間 入力を𝑁 × 𝐿 × 𝐶𝑖𝑛として1 × 𝐿のカーネルで畳み込む 𝑁:点の数、 𝐿:接平面を1次元にした長さ( = 𝑙2 )、 𝐶𝑖𝑛:チャネル数 近傍点の接平面への投影 投影接平面 画像 最近傍で補 間 混合ガウス 補間 Top-3近傍で 混合ガウス補 間
- 52. [Tatarchenko2018]Tangent Convolutions (2/3) 計算の効率化のため、以下を事前計算 接平面の各位置𝒖に対する近傍点𝑔𝑖 𝒖 を事前計算 接平面の各位置𝒖における値𝑆 𝒖 を決定するために、 𝑔𝑖 𝒖 の距 離に応じた重み𝑤𝑖 𝒖 Pooling 3D Gridに点群を分割し、Grid内でAverage Pooling ネットワーク構造
- 53. [Tatarchenko2018]Tangent Convolutions (3/3) ソースコード https://github.com/tatarchm/tangent_conv D: Depth H: Height N: Normal RGB: Red Green Blue
- 54. [Wang2018]Deep Parametric Continuous CNN カーネルを離散ではなく、パラメトリックな連続関数として表現 (ここではMulti-Layer Perceptron) 任意の構造の入力に対して、任意の個所の出力が計算可能 ℎ 𝑛 = 𝑚=−𝑀 𝑀 𝑓 𝑛 − 𝑚 𝑔[𝑚] ℎ 𝒙 = න −∞ ∞ 𝑓 𝒚 𝑔 𝒙 − 𝒚 ⅆ𝑦 ≈ 𝑖 𝑁 1 𝑁 𝑓 𝒚𝑖 𝑔(𝒙 − 𝒚𝑖) 連続カーネル離散カーネル
- 55. [Wang2018]Deep Parametric Continuous CNN Continuous Convolution Layer 各点の k近傍 k近傍 点座標 近傍点への カーネル重み 畳み込み Semantic Segmentation Network
- 56. [Wang2018]Deep Parametric Continuous CNN 車両の屋根に搭載したVelodyne-64で取得したデータセットに 対して評価
- 57. まとめ Point CloudのSemantic Segmentationはここでは紹介しき れないほど、まだまだ多くの手法があります。 点ごとに特徴量を求めるアプローチ、画像へ投影するア プローチ、Voxelに対して畳み込むアプローチ、RNNを用 いるアプローチについて紹介しました。 Point Cloudに対するCNNについても様々な手法が提案 されており、それらの大半はSemantic Segmentationに直 接応用可能です。 PointNetおよびPointNet++が現時点で最も多く利用されてい ます。 Uber/トロント大のグループがContinuous Convolutionを利用し た研究をいくつか発表しています
- 58. 付録 [Zehng2015]Zehng, S., Jayasumana, S., Romera-Paredes, B., Vineet,V., Su, Z., Du, D., …Torr, P. H. S. (2015). Conditional Random Fields as Recurrent Neural Networks. In IEEE Conference on ComputerVision and Pattern Recognition. [Iandola2016]Iandola, F. N., Han, S., Moskewicz, M.W., Ashraf, K., Dally,W. J., & Keutzer, K. (2016). SqueezeNet: AlexNet-level accuracy with 50x fewer parameters and <0.5MB model size. ArXiv, 1602.07360.
- 59. [Zheng2015]CRF as RNN Fully Connected CRFの平均場近似による学習と等価なRNNを構築 特徴抽出部分にFCN(Fully Convolutional Networks)を用いることで、 end to endで誤差逆伝播法による学習が行えるネットワークを構築 平均場近似の一回のIterationを表すCNN ネットワークの全体像 ソースコード https://github.com/torrvisi on/crfasrnn (Caffe)
- 60. [Iandola2016]SqueezeNet AlexNetと同等の性能を1/510のパラメータサイズで実現 畳み込み処理を、1x1畳み込みでチャネル数を減らし (squeeze)、3x3と1x1畳み込みを併用する(expand)ことでカー ネルサイズを減らすことで、全体のパラメータ数削減 Downsample(PoolingやStride>1の畳み込み)を後ろの層で行 うことで精度向上