
























![ FLD Source- Decrements the stack pointer by
one and copies a real number from a
stack element or memory location to the new ST.
•FLD ST(3) ;Copies ST(3) to ST.
•FLD LONG_REAL[BX] ;Number from memory
copied to ST.
FLD Destination- Copies ST to a specified stack
position or to a specified memory location .
•FST ST(2) ;Copies ST to ST(2),and increment
stack pointer.
•FST SHORT_REAL[BX] ;Copy ST to a memory at
a SHORT_REAL[BX]
28](https://image.slidesharecdn.com/8087microprocessor-240505131933-9db6895a/85/8087-MICROPROCESSOR-and-diagram-with-definition-pdf-27-320.jpg)

![ FILD Source – Integer load. Convert integer
number from memory to temporary-real
sformat and push on 8087 stack.
•FILD DWORD PTR[BX] ;Short integer from
memory at [BX].
FIST Destination- Integer store. Convert number
from ST to integer and copy to memory.
•FIST LONG_INT ;ST to memory locations named
LONG_INT.
20-Nov-10
30
www.eazynotes.com](https://image.slidesharecdn.com/8087microprocessor-240505131933-9db6895a/85/8087-MICROPROCESSOR-and-diagram-with-definition-pdf-29-320.jpg)


































Ad
More Related Content
What's hot (20)
Similar to 8087 MICROPROCESSOR and diagram with definition.pdf (20)


















Ad
More from MalligaarjunanN (20)




















Ad
Recently uploaded (20)




















8087 MICROPROCESSOR and diagram with definition.pdf
- 1. 2 Compatible Processor and Coprocessor Processors 1. 8086 & 8088 2. 80286 3. 80386DX 4. 80386SX 5. 80486DX 6. 80486SX Coprocessors 1. 8087 2. 80287,80287XL 3. 80287,80387DX 4. 80387SX 5. It is Inbuilt 6. 80487SX
- 2. INTRODUCTION 8087 was the first math coprocessor for 16-bit processors designed by Intel. It was built to pair with 8086 and 8088. The purpose of 8087 was to speed up the computations involving floating point calculations. Addition, subtraction, multiplication and division of simple numbers is not the coprocessor’s job. It does all the calculations involving floating point numbers like scientific calculations and algebraic functions. 3
- 3. INTRODUCTION By having a coprocessor, which performs all the calculations, it can free up a lot of CPU’s time. This would allow the CPU to focus all of its resources on the other functions it has to perform. This increases the overall speed and performance of the entire system. This coprocessor introduced about 60 new instructions available to the programmer. All the mnemonics begin with “F” to differentiate them from the standard 8086 instructions. For e.g.: in contrast to ADD/MUL, 8087 provide FADD/FMUL. 4
- 4. INTRODUCTION Math coprocessor is also called as: Numeric Processor Extension (NPX) Numeric Data Processor (NDP) Floating Point Unit (FPU) 5
- 5. ARCHITECTURE OF 8087 8087 coprocessor is designed to operate with 8086 microprocessor. The microprocessor and coprocessor can execute their respective instructions simultaneously. Microprocessor interprets and executes the normal instruction set and the coprocessor interprets and executes only the coprocessor instructions. All the coprocessor instructions are ESC instructions, i.e. they start with “F”. 6
- 7. ARCHITECTURE OF 8087 The internal structure of 8087 coprocessor is divided into two major sections: Control Unit (CU) Numerical Execution Unit (NEU) 8
- 8. CONTROL UNIT (CU) It interfaces coprocessor to the microprocessor system bus. It also synchronize the operation of the coprocessor and the microprocessor. This unit has a Control Word, Status Word and Data Buffer. If an instruction is ESC instruction, then coprocessor executes it. If not, then microprocessor executes. 9
- 9. NUMERIC EXECUTION UNIT (NEU) This unit is responsible for executing all coprocessor instructions. It has an 8 register stack that holds the operands for instructions and result of instructions. The stack contains 8 registers that are 80-bits wide. Numeric data is transferred inside the coprocessor in two parts: 64-bit mantissa bus 16-bit exponent bus 10
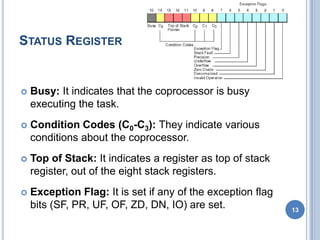
- 11. STATUS REGISTER Status Register tells the overall status of 8087 coprocessor. It is a 16-bit register. It is accessed by executing the FSTSW instruction. This instruction stores the contents of status register into memory. Once the status is stored in memory, the bit positions of the status register can be examined. 12
- 12. STATUS REGISTER Busy: It indicates that the coprocessor is busy executing the task. Condition Codes (C0-C3): They indicate various conditions about the coprocessor. Top of Stack: It indicates a register as top of stack register, out of the eight stack registers. Exception Flag: It is set if any of the exception flag bits (SF, PR, UF, OF, ZD, DN, IO) are set. 13
- 13. STATUS REGISTER Stack Fault: It is not available in 8087. It is active only in 80387 and above. Precision: It indicates that the result has exceeded the selected precision. Underflow: It tells if the result is too small to fit in a register. Overflow: It tells if the result is too large to fit in a register. 14
- 14. STATUS REGISTER Zero Divide: It indicates that you try to divide a non-zero value by zero. Denormalized: It indicates that at least one of the operand is de-normalized. Invalid Operation: It indicates an invalid operation. For e.g.: pushing more than eight items onto the stack, attempting to pop an item off an empty stack or taking the square root of a negative number. 15
- 16. CONTROL REGISTER Control Register controls the operating modes of 8087. It is also a 16-bit register. It performs rounding control and precision control. It is also used to do masking and unmasking of the exception bits that correspond to the rightmost six bits of the status register. FLDCW instruction is used to load the value into control register. 17
- 17. CONTROL REGISTER Rounding Control: It determines the type of rounding or truncating to be done. 00=Round to nearest or even 01=Round down towards minus infinity 10=Round up towards plus infinity 11=Chop or truncate towards zero Precision Control: It sets the precision of the result. 00=Single precision (short) 01=Reserved 10=Double precision (long) 11=Extended precision (temporary) Exception Masks: It determines that whether an error effects the exception bits in the status register. If it is one, then the corresponding error is ignored. If it is zero and the corresponding error occurs, then it generates an interrupt, and the corresponding bit in status register is set. 18
- 18. TAG REGISTER 19 Tag Values: 00 = Valid 01 = Zero 10 = Invalid 11 = Empty TAG 7 TAG 6 TAG 5 TAG 4 TAG 3 TAG 2 TAG 1 TAG 0
- 19. TAG REGISTER Tag Register is used to indicate the contents of each register in the stack. There are total 8 tags (Tag 0 to Tag 7) in this register and each tag uses 2 bits to represent a value. Therefore, it is a 16-bit register. 20 Tag Values: 00 = Valid 01 = Zero 10 = Invalid 11 = Empty TAG 7 TAG 6 TAG 5 TAG 4 TAG 3 TAG 2 TAG 1 TAG 0
- 20. PIN DIAGRAM OF 8087 21 8 0 8 7 GND GND CLK NC NC AD0 AD1 AD2 AD3 AD4 AD5 AD6 AD7 AD8 AD9 AD10 AD11 AD12 AD13 AD14 VCC AD15 A16/S3 A17/S4 A18/S5 A19/S6 BHE/S7 RQ/GT1 INT RQ/GT0 NC NC S2 S1 S0 QS0 QS1 BUSY READY RESET
- 21. INTERFACING OF 8086 AND 8087 Multiplexed address-data bus lines are connected directly from 8086 to 8087. The status lines and the queue status lines are connected directly from 8086 to 8087. The Request/Grant (RQ/GT0 and RQ/GT1) signals of 8087 are connected to RQ/GT0 and RQ/GT1 of 8086. BUSY signal of 8087 is connected to TEST pin of 8086. 22
- 22. EXCEPTION HANDLING The 8087 detects six different types of exception conditions that occur during instruction execution. These will cause an interrupt if unmasked and interrupts are enabled. 1) INVALID OPERATION 2) OVERFLOW 3) ZERO DIVISOR 4) UNDERFLOW 5) DENORMALIZED OPERAND 6) INEXACT RESULT 23
- 23. SYNCHRONIZATION BETWEEN 8086 AND 8087 24 Escape Activate Test Pin Execute 8086 Instruction Wait Deactivate Test Pin Monitor 8086 Wake up Co-processor Wakeup 8086 8086 8087
- 24. DATA TYPES Internally, all data operands are converted to the 80-bit temporary real format. We have 3 types. •Integer data type •Packed BCD data type •Real data type 25
- 25. INSTRUCTION SET The 8087 instruction mnemonics begins with the letter F which stands for Floating point and distinguishes from 8086. The 8087 detects an error condition usually called an exception when it executing an instruction it will set the bit in its Status register. Types I. DATA TRANSFER INSTRUCTIONS. II. ARITHMETIC INSTRUCTIONS. III. COMPARE INSTRUCTIONS. 20-Nov-10 26 www.eazynotes.com
- 26. DATA TRANSFERS INSTRUCTIONS REAL TRANSFER FLD Load real FST Store real FSTP Store real and pop FXCH Exchange registers INTEGER TRANSFER FILD Load integer FIST Store integer FISTP Store integer and pop 27
- 27. FLD Source- Decrements the stack pointer by one and copies a real number from a stack element or memory location to the new ST. •FLD ST(3) ;Copies ST(3) to ST. •FLD LONG_REAL[BX] ;Number from memory copied to ST. FLD Destination- Copies ST to a specified stack position or to a specified memory location . •FST ST(2) ;Copies ST to ST(2),and increment stack pointer. •FST SHORT_REAL[BX] ;Copy ST to a memory at a SHORT_REAL[BX] 28
- 28. FXCH Destination – Exchange the contents of ST with the contents of a specified stack element. •FXCH ST(5) ;Swap ST and ST(5) 20-Nov-10 29 www.eazynotes.com
- 29. FILD Source – Integer load. Convert integer number from memory to temporary-real sformat and push on 8087 stack. •FILD DWORD PTR[BX] ;Short integer from memory at [BX]. FIST Destination- Integer store. Convert number from ST to integer and copy to memory. •FIST LONG_INT ;ST to memory locations named LONG_INT. 20-Nov-10 30 www.eazynotes.com
- 30. ARITHMETIC INSTRUCTIONS. FOUR BASIC ARITHMETIC FUNCTIONS: ADDITION, SUBTRACTION, MULTIPLICATION, AND DIVISION Addition FADD Add real FADDP Add real and pop FIADD Add integer Subtraction FSUB Subtract real FSUBP Subtract real and pop FISUB Subtract integer 31
- 31. Multiplication FMUL Multiply real FMULP Multiply real and pop FIMUL Multiply integer Advanced FABS Absolute value FCHS Change sign FPREM Partial remainder FPRNDINT Round to integer FSCALE Scale FSQRT Square root FXTRACT Extract exponent and mantissa. 20-Nov-10 32 www.eazynotes.com
- 32. FADD ST(3), ST ;Add ST to ST(3), result in ST(3) •FADD ST,ST(4) ;Add ST(4) to ST, result in ST. •FADD ;ST + ST(1), pop stack result at ST •FADDP ST(1) ;Add ST(1) to ST. Increment stack pointer so ST(1) become ST. •FSUB ST(2), ST ;ST(2)=ST(2) – ST. •FSUB Rate ;ST=ST – real no from memory. •FSUB ;ST=( ST(1) – ST) FSUBP - Subtract ST from specified stack element and put result in specified stack element .Then increment the pointer by one. •FSUBP ST(1) ;ST(1)-ST. ST(1) becomes new ST 33
- 33. COMPARE INSTRUCTIONS. FCOM Compare real FCOMP Compare real and pop FCOMPP Compare real and pop twice FICOM Compare integer FICOMP Compare integer and pop FTST Test ST against +0.0 FXAM Examine ST Transcendental Instruction. 34