Artificial Neural Networks: Introduction, Neural Network representation, Appropriate problems, Perceptron- Perceptron Training rule, Back propagation algorithm.
0 likes0 views

Artificial Neural Networks: Introduction, Neural Network representation, Appropriate problems, Perceptron- Perceptron Training rule, Back propagation algorithm.






























































![To derive a weight learning rule for linear units, specify a
measure for the training error of a hypothesis (weight vector),
relative to the training examples.
Where,
• D is the set of training examples,
• td is the target output for training example d,
• od is the output of the linear unit for training example d
• E [ w ] is simply half the squared difference between the target output td and the linear unit output
od, summed over all training examples.
10
5](https://image.slidesharecdn.com/mlmodule3part1-250502064421-8d4d02bc/85/Artificial-Neural-Networks-Introduction-Neural-Network-representation-Appropriate-problems-Perceptron-Perceptron-Training-rule-Back-propagation-algorithm-66-320.jpg)



















































Ad
More Related Content
Similar to Artificial Neural Networks: Introduction, Neural Network representation, Appropriate problems, Perceptron- Perceptron Training rule, Back propagation algorithm. (20)
More from BMS Institute of Technology and Management (15)













Ad
Recently uploaded (20)




















Ad
Artificial Neural Networks: Introduction, Neural Network representation, Appropriate problems, Perceptron- Perceptron Training rule, Back propagation algorithm.
- 1. MODULE -3 1 ARTIFICIAL NEURAL NETWORKS By. Dr. Ravi Kumar B N Assistant Professor, Dept. of CSE
- 2. • Introduction • Neural Network Representation • Appropriate Problems for Neural Network Learning • Perceptrons • Multilayer Networks and BACKPROPAGATION Algorithms • Remarks on the BACKPROPAGATIONAlgorithms 2 CONTENT
- 3. 3
- 6. INTRODUCTION 6 An artificial neural network is an attempt to simulate the network of neurons that make up a human brain so that the computer will be able to learn things and make decisions in a humanlike manner. Artificial neural networks (ANNs) provide a general, practical method for learning real-valued, discrete-valued, and vector-valued target functions from examples.
- 7. What type of learning is used in ANN? 7 Supervised Learning This learning process is dependent. During the training of ANN under supervised learning, the input vector is presented to the network, which will give an output vector. This output vector is compared with the desired output vector.
- 8. Biological Motivation 8 • The study of artificial neural networks (ANNs) has been inspired by the observation that biological learning systems are built of very complex webs of interconnected Neurons • Human information processing system consists of brain neuron: basic building block cell that communicates information to and from various parts of body • Simplest model of a neuron: considered as a threshold unit –a processing element (PE) • Collects inputs & produces output if the sum of the input exceeds an internal threshold value
- 10. Facts of Human Neurobiology 10 • Number of neurons ~ 1011 • Connection per neuron ~ 10 4 – 5 • Neuron switching time ~ 0.001 second or 10 -3 • Scene recognition time ~ 0.1 second • 100 inference steps doesn’t seem like enough • Highly parallel computation based on distributed representation
- 11. Properties of Neural Networks 11 • Many neuron-like threshold switching units • Many weighted interconnections among units • Highly parallel, distributed process • Emphasis on tuning weights automatically • Input is a high-dimensional discrete or real-valued (e.g, sensor input) What is a threshold unit in neural network? In neural networks, a threshold is a value that determines whether the output of a neuron or an activation function is activated or not. It acts as a decision boundary, where if the output exceeds the threshold, it is considered as activated or fired, otherwise it remains inactive.
- 12. When to consider Neural Networks ? 12 • Input is a high-dimensional discrete or real-valued (e.g., sensor input) • Output is discrete or real-valued • Output is a vector of values • Possibly noisy data • Form of target function is unknown • Human readability of result is unimportant Examples: 1. Speech phoneme recognition 2. Image classification 3. Financial predition
- 13. Neuron 13
- 14. Neuron 14
- 15. Neuron 15
- 16. 16
- 17. Neuron 17
- 20. 20
- 21. • A prototypical example of ANN learning is provided by Pomerleau's (1993) system ALVINN, which uses a learned ANN to steer an autonomous vehicle driving at normal speeds on public highways. • The input to the neural network is a 30x32 grid of pixel intensities obtained from a forward-pointed camera mounted on the vehicle. • The network output is the direction in which the vehicle is steered. 21
- 22. • Figure illustrates the neural network representation. • The network is shown on the left side of the figure, with the input camera image depicted below it. • Each node (i.e., circle) in the network diagram corresponds to the output of a single network unit, and the lines entering the node from below are its inputs. • There are four units that receive inputs directly from all of the 30 x 32 pixels in the image. These are called "hidden" units because their output is available only within the network and is not available as part of the global network output. Each of these four hidden units computes a single real-valued output based on a weighted combination of its 960 inputs • These hidden unit outputs are then used as inputs to a second layer of 30 "output" units. • Each output unit corresponds to a particular steering direction, and the output values of these units determine which steering direction is recommended most strongly. 22
- 23. • The diagrams on the right side of the figure depict the learned weight values associated with one of the four hidden units in thisANN. • The large matrix of black and white boxes on the lower right depicts the weights from the 30 x 32 pixel inputs into the hidden unit. Here, a white box indicates a positive weight, a black box a negative weight, and the size of the box indicates the weight magnitude. • The smaller rectangular diagram directly above the large matrix shows the weights from this hidden unit to each of the 30 output units. 23
- 24. 63 Footage of a Tesla car autonomously driving around along with the sensing and perception involved.
- 25. APPROPRIATE PROBLEMS FOR NEURAL NETWORK LEARNING 25 ANN is appropriate for problems with the following characteristics : • Instances are represented by many attribute-value pairs. • The target function output may be discrete-valued, real-valued, or a vector of several real- or discrete-valued attributes. • The training examples may contain errors. • Long training times are acceptable. • Fast evaluation of the learned target function may be required • The ability of humans to understand the learned target function is not important
- 26. Architectures of Artificial Neural Networks 26 An artificial neural network can be divided into three parts (layers), which are known as: • Input layer: This layer is responsible for receiving information (data), signals, features, or measurements from the external environment. These inputs are usually normalized within the limit values produced by activation functions • Hidden, intermediate, or invisible layers: These layers are composed of neurons which are responsible for extracting patterns associated with the process or system being analysed. These layers perform most of the internal processing from a network. • Output layer : This layer is also composed of neurons, and thus is responsible for producing and presenting the final network outputs, which result from the processing performed by the neurons in the previous layers.
- 27. Architectures of Artificial Neural Networks 27 The main architectures of artificial neural networks, considering the neuron disposition, how they are interconnected and how its layers are composed, can be divided as follows: 1. Single-layer feedforward network 2. Multi-layer feedforward networks 3. Recurrent or Feedback networks 4. Mesh networks
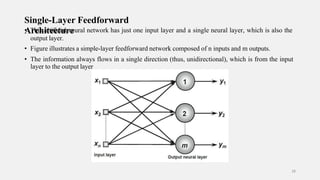
- 28. Single-Layer Feedforward • AT rh cih s i at rt e if c ic tiu alrn e eural network has just one input layer and a single neural layer, which is also the output layer. • Figure illustrates a simple-layer feedforward network composed of n inputs and m outputs. • The information always flows in a single direction (thus, unidirectional), which is from the input layer to the output layer 28
- 29. Multi-Layer Feedforward • AT rh cih s iatre tif c ic ti u alre neural feedforward networks with multiple layers are composed of one or more hidden neural layers. • Figure shows a feedforward network with multiple layers composed of one input layer with n sample signals, two hidden neural layers consisting of n1 and n2 neurons respectively, and, finally, one output neural layer composed of m neurons representing the respective output values of the problem being analyzed. 29
- 30. Recurrent or Feedback • AI r ncth heis teen c et tw uo rre ks, the outputs of the neurons are used as feedback inputs for other neurons. • Figure illustrates an example of a Perceptron network with feedback, where one of its output signals is fed back to the middle layer. 30
- 31. Mesh Architectures • The main features of networks with mesh structures reside in considering the spatial arrangement of neurons for pattern extraction purposes, that is, the spatial localization of the neurons is directly related to the process of adjusting their synaptic weights and thresholds. • Figure illustrates an example of the Kohonen network where its neurons are arranged within a two- dimensional space 31
- 32. What is Perceptron? Perceptron is one of the simplest Artificial neural network architectures. It was introduced by Frank Rosenblatt in 1957s. It is the simplest type of feedforward neural network, consisting of a single layer of input nodes that are fully connected to a layer of output nodes. It can learn the linearly separable patterns. it uses slightly different types of artificial neurons known as threshold logic units (TLU). 32 A perceptron is the simplest type of neural network— kind of like a tiny brain cell that makes decisions. •Takes Inputs: Think of it like getting marks in different subjects: Math = 90, Science = 80, English = 70 •Multiplies with Weights: Each input is multiplied by a weight (like giving importance •Adds a Bias: A small number added to adjust the output. •Adds Everything Together: Total = (Input1 × Weight1) + (Input2 × Weight2) + ... + Bias •Applies Activation Function: It decides: “Is the result big enough to say YES (1) or NO (
- 33. Types of Perceptron •Single-Layer Perceptron: This type of perceptron is limited to learning linearly separable patterns. effective for tasks where the data can be divided into distinct categories through a straight line. •Multilayer Perceptron: Multilayer perceptrons possess enhanced processing capabilities as they consist of two or more layers, adept at handling more complex patterns and relationships within the data. Basic Components of Perceptron A perceptron, the basic unit of a neural network, comprises essential components that collaborate in information processing. •Input Features: The perceptron takes multiple input features, each input feature represents a characteristic or attribute of the input data. •Weights: Each input feature is associated with a weight, determining the significance of each input feature in influencing the perceptron’s output. During training, these weights are adjusted to learn the optimal values. 33
- 34. •Summation Function: The perceptron calculates the weighted sum of its inputs using the summation function. The summation function combines the inputs with their respective weights to produce a weighted sum. •Activation Function: The weighted sum is then passed through an activation function. Perceptron uses Heaviside step function functions. which take the summed values as input and compare with the threshold and provide the output as 0 or 1. •Output: The final output of the perceptron, is determined by the activation function’s result. For example, in binary classification problems, the output might represent a predicted class (0 or 1). •Bias: A bias term is often included in the perceptron model. The bias allows the model to make adjustments that are independent of the input. It is an additional parameter that is learned during training. •Learning Algorithm (Weight Update Rule): During training, the perceptron learns by adjusting its weights and bias based on a learning algorithm or backpropagation. A common approach is the perceptron learning algorithm, which updates weights based on the difference between the predicted output and the true output. 34
- 35. Bias example? 35 To understand the role of biases, consider a simple example. Imagine a neuron that processes the brightness of an image pixel . Without a bias, this neuron might only activate when the pixel's brightness is exactly at a certain threshold.
- 36. PERCEPTRONS • Perceptron is a single layer neural network. • A perceptron takes a vector of real-valued inputs, calculates a linear combination of these inputs, then outputs a 1 if the result is greater than some threshold and -1 otherwise • Given inputs x1 through xn, the output O(x1, . . . , xn) computed by the perceptron is • where each wi is a real-valued constant, or weight, that determines the contribution of input xi to the perceptron output. • -w0 is a threshold that the weighted combination of inputs w1x1 + . . . + wnxn must surpass in order for the perceptron to output a 1. 36
- 37. Sometimes, the perceptron function is written as, Learning a perceptron involves choosing values for the weights w0 , . . . , wn . Therefore, the space H of candidate hypotheses considered in perceptron learning is the set of all possible real-valued weight vectors Why do we need Weights and Bias? Weights shows the strength of the particular node. A bias value allows you to shift the activation function curve up or down 37
- 38. 38
- 39. 39
- 40. 40
- 41. Representational Power of Perceptrons *The viewed 41 perceptron can be as representing a hyperplane decision surface in the n-dimensional space of instances. *The perceptron outputs a 1 for instances lying on one side of the hyperplane and outputs a -1 for instances lying on the other side
- 42. The Perceptron Training Rule 42 The learning problem is to determine a weight vector that causes the perceptron to produce the correct + 1 or - 1 output for each of the given training examples. Tolearn an acceptable weight vector • Begin with random weights, then iteratively apply the perceptron to each training example, modifying the perceptron weights whenever it misclassifies an example. • This process is repeated, iterating through the training examples as many times as needed until the perceptron classifies all training examples correctly. • Weights are modified at each step according to the perceptron training rule, which revises the weight wi associated with input xi according to the rule.
- 43. • The role of the learning rate is to moderate the degree to which weights are changed at each step. It is usually set to some small value (e.g., 0.1) and is sometimes made to decay as the number of weight-tuning iterations increases Drawback: The perceptron rule finds a successful weight vector when the training examples are linearly separable, it can fail to converge if the examples are not linearly separable. 43
- 44. 44
- 45. 45
- 46. 46
- 47. 47
- 48. 48
- 49. Final perceptron model for AND 49
- 50. AND function Solution 2: If we initialize weights with 0.6 for both W1 and W2 we will get the solution in single iteration itself. But for better demonstration we should also show how we change the wights so we considered different weights for W1 and W2 in solution1 • IfA=0 & B=0 → 0*0.6 + 0*0.6 = 0. This is not greater than the threshold of 1, so the output = 0. • IfA=0 & B=1 → 0*0.6 + 1*0.6 = 0.6. This is not greater than the threshold, so the output = 0. • IfA=1 & B=0 → 1*0.6 + 0*0.6 = 0.6. This is not greater than the threshold, so the output = 0. • IfA=1 & B=1 → 1*0.6 + 1*0.6 = 1.2. This exceeds the threshold, so the output = 1. 50
- 51. 51
- 52. 52
- 53. 53
- 54. 54
- 55. 55
- 56. 56
- 57. 57
- 58. Final perceptron model for OR 58
- 59. 59
- 60. 60
- 61. 10 0
- 62. 10 1
- 63. 10 2
- 64. 10 3
- 65. Gradient Descent and the Delta Rule • If the training examples are not linearly separable, the delta rule converges toward a best-fit approximation to the target concept. • The key idea behind the delta rule is to use gradient descent to search the hypothesis space of possible weight vectors to find the weights that best fit the training examples. To understand the delta training rule, consider the task of training an unthresholded perceptron. That is, a linear unit for which the output O is given by 10 4
- 66. To derive a weight learning rule for linear units, specify a measure for the training error of a hypothesis (weight vector), relative to the training examples. Where, • D is the set of training examples, • td is the target output for training example d, • od is the output of the linear unit for training example d • E [ w ] is simply half the squared difference between the target output td and the linear unit output od, summed over all training examples. 10 5
- 67. MULTILAYER NETWORKS AND THE BACKPROPAGATION ALGORITHM 12 3 Multilayer networks learned by the BACKPROPACATION algorithm are capable of expressing a rich variety of nonlinear decision surfaces
- 68. • Decision regions of a multilayer feedforward network. The network shown here was trained to recognize 1 of 10 vowel sounds occurring in the context "h_d" (e.g., "had," "hid"). The network input consists of two parameters, F1 and F2, obtained from a spectral analysis of the sound. The 10 network outputs correspond to the 10 possible vowel sounds. The network prediction is the output whose value is highest. • The plot on the right illustrates the highly nonlinear decision surface represented by the learned network. Points shown on the plot are test examples distinct from the examples used to train the network. 12 4
- 69. A Differentiable Threshold Unit • Sigmoid unit-a unit very much like a perceptron, but based on a smoothed, differentiable threshold function. • The sigmoid unit first computes a linear combination of its inputs, then applies a threshold to the result. In the case of the sigmoid unit, however, the threshold output is a continuous function of its input. • More precisely, the sigmoid unit computes its output O as σ is the sigmoid function 12 5
- 70. 12 6
- 71. The BACKPROPAGATION Algorithm • The BACKPROPAGATION Algorithm learns the weights for a multilayer network, given a network with a fixed set of units and interconnections. It employs gradient descent to attempt to minimize the squared error between the network output values and the target values for these outputs. • In BACKPROPAGATION algorithm, we consider networks with multiple output units rather than single units as before, so we redefine E to sum the errors over all of the network output units. where, • outputs - is the set of output units in the network • tkd and Okd - the target and output values associated with the kth output unit • d - training example 12 7
- 72. 12 8
- 73. 12 9
- 76. Stage 1: Forward Pass (Initial)
- 85. Final Output After One Update: y=0.6820
- 87. THANK YOU 13 9