





















































More Related Content
Similar to Control System Modeling case study with complete explanation (20)
Recently uploaded (20)


















Control System Modeling case study with complete explanation
- 6. Unit I - Control System Modeling
- 7. Control system • A control system is defined as a system of devices that manages, commands, directs, or regulates the behavior of other devices or systems to achieve a desired result. • A control system can be simplified as a system, which controls other systems.
- 8. Need of control system
- 9. Need of control system One needs to be pro-active!
- 10. Need of control system One needs to be pro-active! No one wants to find a fault after it had occurred!
- 11. Need of control system One needs to be pro-active! No one wants to find a fault after it had occurred! One has to expect the unexpected!
- 12. Need of control system • In order to modify the behavior of a system so it behaves in a specific desirable way over time, control is introduced.
- 13. Control System : Definition and Representation • A system, which provides the desired response by controlling the output. • A collection of devices/systems which function together to drive things in a desired direction, either from external input or sensed conditions. • Today are a central part of industry and of automation.
- 14. Control system • eliminates the redundant manual controls. • reduces human errors that can cost loss. • certifies that there is a strategic method to improving productivity. • ensures enhancement of the best practices.
- 15. Control system • should be evaluated frequently to ensure that the processes are where they need to be and functioning efficiently and effectively.
- 16. Basic components of Control System • Input : Source of power to the system. • Process being controlled : Function of the system. • Output : Result of function of the system. • Sensing elements : To sense the output quantities/errors. • Controller & Actuating devices : System that controls & system that is controlled.
- 17. Control System characteristics • Accuracy: is the measurement tolerance of the instrument and defines the limits of the errors made when the instrument is used in normal operating conditions. • Sensitivity: is changing with the change in surrounding conditions, internal disturbance or any other parameters. • Noise: an undesired input signal. • Stability: the output must be bounded for bounded input signal and output must be zero if the input is zero. • Bandwidth: operating frequency range decides the bandwidth of the control system. • Speed: time taken by the control system to achieve its stable output. • Oscillation: small numbers of oscillation or constant oscillation of output tend to indicate the system to be stable.
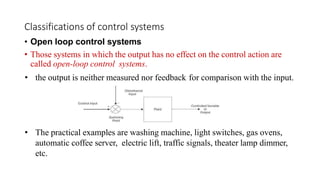
- 18. Classifications of control systems • Open loop control systems • Those systems in which the output has no effect on the control action are called open-loop control systems. • the output is neither measured nor feedback for comparison with the input. • The practical examples are washing machine, light switches, gas ovens, automatic coffee server, electric lift, traffic signals, theater lamp dimmer, etc.
- 20. • In any open-loop control system the output is not compared with the reference input. • Open-loop control can be used, in practice, only if the relationship between the input and output is known and if there are neither internal nor external disturbances Advantages I. They are simple in construction and design. II. They are economic. III. Easy for maintenance. IV. Not much problems of stability. V. Convenient to use when output is difficult to measure Disadvantages I. Inaccurate and unreliable because accuracy is dependent on calibration. II. Error in results due to parameter variations, internal disturbances. III. To maintain quality and accuracy, recalibration of controller is necessary in regular time interval.
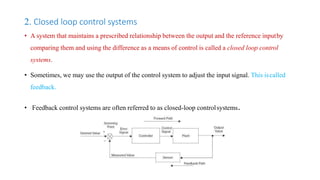
- 21. 2. Closed loop control systems • A system that maintains a prescribed relationship between the output and the reference inputby comparing them and using the difference as a means of control is called a closed loop control systems. • Sometimes, we may use the output of the control system to adjust the input signal. This iscalled feedback. • Feedback control systems are often referred to as closed-loop controlsystems.
- 22. • The practical examples are air conditioner, automatic electric iron, missile launched and auto tracked by radar, servo voltage stabilizer, sun-seeker solar system, water level controller, etc. • The term closed-loop control always implies the use of feedback control action in order to reduce system error. Advantages: I. Accuracy is very high as errors are corrected. II. It senses changes in output due to parametric changes, internal disturbances, etc. and corrects them. III. Reduced effect of non-linearties. IV. High bandwidth means large operating frequency range. V. Facilitates and supports automation. Disadvantages: I. Complicated in design and costlier maintenance. II. This system is generally higher in cost and power. III. Stability is a major problem in this system.
- 23. Comparison between open loop and closed loop control systems Open loop system Closed loop system No feedback and elements of feedback. Feedback and elements of feedback exists. No error detector. Error detector is present. Inaccurate. Accurate. Highly sensitive to parameter changes. Less sensitive to parameter changes. Small bandwidth. Large bandwidth. No issue of stability. Issue of stability. Lower in cost and power. Higher in cost and power. Examples: washing machine, light switches, gas ovens, automatic coffee server, electric lift, traffic signals, theater lamp dimmer, etc. Examples: air conditioner, automatic electric iron, missile launched and auto tracked by radar, servo voltage stabilizer, sun-seeker solar system, water level controller, etc.
- 24. Concept of superposition for linear systems • Before understanding concept of superposition for linear systems, we have to understand concept of linearity. • Linearity: • Basically, a mathematical equation is said to be linear if the following properties hold • homogeneity • additivity • Homogeneity requires that if the input (excitation) of a system (equation) is multiplied by a constant, thenthe output should be obtained by multiplying by the same constant to obtain the correct solution. Does homogeneity hold for the following equation? y = 4x If x = 1, y = 4. If we double x to x = 2 and substitute this value into above equation, we get y = 8.
- 25. • Now for homogenity to hold, scaling should hold for y. That is, y has a value of 4 when x = 1. If we increase x by a factor of 2, when we should be able to multiply y by the same factor and get the same answer and when we substitute into the right side of the equation for x = 2. • Additivity property is equivalent to the statement that the response of a system to a sum of inputs is the same as the responses of the system when each input is applied separately and the individual responses summed (added together). This can be explained by considering the following illustrations. Given, y = 4x Let x = x1, then y1 = 4x1 Let x = x2, then y2 = 4x2 Then y = y1 + y2 = 4x1 + 4x2 …. Eq 1.1 Also, we note, y = f(x1 + x2) = 4(x1 + x2) = 4x1 + 4x2 …. Eq 1.2 Since Equations (1.1) and (1.2) are identical, the additivity property holds.
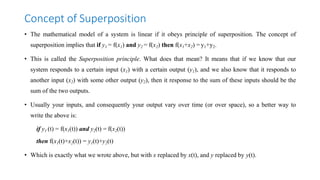
- 26. Concept of Superposition • The mathematical model of a system is linear if it obeys principle of superposition. The concept of superposition implies that if y1 = f(x1) and y2 = f(x2) then f(x1+x2) = y1+y2. • This is called the Superposition principle. What does that mean? It means that if we know that our system responds to a certain input (x1) with a certain output (y1), and we also know that it responds to another input (x2) with some other output (y2), then it response to the sum of these inputs should be the sum of the two outputs. • Usually your inputs, and consequently your output vary over time (or over space), so a better way to write the above is: if y1 (t) = f(x1(t)) and y2(t) = f(x2(t)) then f(x1(t)+x2(t)) = y1(t)+y2(t) • Which is exactly what we wrote above, but with x replaced by x(t), and y replaced by y(t).
- 27. ControlSystem: Classification Types : Considering I/P-O/P 1. SISO (single input single output) 2. MIMO (multiple input multiple output) Types : Considering Signal Types 1. Continuous time control system 2. Discrete time control system