

![Linear Search
Linear Search is defined as a sequential search algorithm that starts at one
end and goes through each element of a list until the desired element is
found, otherwise the search continues till the end of the data set. It is the
easiest searching algorithm.
Algorithm Linear(A,n,x)
{
for(i:=0;i<n;i++)
{
If(a[i]=x) then
return i;
}
return -1;
}](https://image.slidesharecdn.com/searchingandsortingmethods-250510103046-f3254d9c/85/Different-Searching-and-Sorting-Methods-pptx-3-320.jpg)










![Bubble Sort Algorithm
Algorithm Bubble_Sort(a, n)
{
for i := 1 to n – 1 do
{
// to keep track of the number of iterations
for j := 0 to n –i-1
{
// to compare the elements inside the particular iteration
if (a[j] > a[j + 1]) then
swap(a[j], a[j + 1]); // swap if any element is greater than its adjacent element
}
}
}](https://image.slidesharecdn.com/searchingandsortingmethods-250510103046-f3254d9c/85/Different-Searching-and-Sorting-Methods-pptx-15-320.jpg)

![Merge Sort
array A[1..n] of n elements given, idea is to split the array in two sets say A[1]……
A[n/2] and A[n/2 + 1]……A[n].
Sort two sets of arrays individually.
Merge two sorted sets of to produce a single sorted list of n elements as follows:
• Repeat the following until no elements remain in one of the arrays:
-compare the first elements in the remaining unprocessed portions of the arrays
- copy the smaller of the two into A, while incrementing the index indicating the
unprocessed portion of that array
• Once all elements in one of the arrays are processed, copy the remaining
unprocessed elements from the other array into A](https://image.slidesharecdn.com/searchingandsortingmethods-250510103046-f3254d9c/85/Different-Searching-and-Sorting-Methods-pptx-17-320.jpg)


![Example
a[1:10]=(310, 285, 179, 652, 351, 423, 861, 254, 450, 520)
• Hand simulation
• (310 285 179 652 351 | 423 861 254 450 520) split
• (310 285 179 | 652 351 | 423 861 254 450 520) split
• (310 285 | 179 | 652 351 | 423 861 254 450 520) split
• (310 | 285 | 179 | 652 351 | 423 861 254 450 520) split
• (285 310 | 179 | 652 351 | 423 861 254 450 520) merge
• (179 285 310 | 652 351 | 423 861 254 450 520) merge
• (179 285 310 | 652 | 351 | 423 861 254 450 520) split
• (179 285 310 | 351 652 | 423 861 254 450 520) merge
• (179 285 310 351 652 | 423 861 254 450 520) merge
• (179 285 310 351 652 | 423 861 254 | 450 520) split
• ……](https://image.slidesharecdn.com/searchingandsortingmethods-250510103046-f3254d9c/85/Different-Searching-and-Sorting-Methods-pptx-20-320.jpg)
![Tree of calls of Merge Sort
a[1:10]=(310, 285, 179, 652, 351, 423, 861, 254, 450, 520)](https://image.slidesharecdn.com/searchingandsortingmethods-250510103046-f3254d9c/85/Different-Searching-and-Sorting-Methods-pptx-21-320.jpg)
![Tree of calls of Merge
a[1:10]=(310, 285, 179, 652, 351, 423, 861, 254, 450, 520)](https://image.slidesharecdn.com/searchingandsortingmethods-250510103046-f3254d9c/85/Different-Searching-and-Sorting-Methods-pptx-22-320.jpg)
![Example:
a[1:8] = 50 10 25 30 15 70 35 55
Tree of calls of MergeSort
Tree of calls of Merge](https://image.slidesharecdn.com/searchingandsortingmethods-250510103046-f3254d9c/85/Different-Searching-and-Sorting-Methods-pptx-23-320.jpg)

![Quick Sort
Partitioning a[1:n] into two subarrays in such a way that sorted subarrays do not need
to be merged later.
This is accomplished by rearranging the elements in a[1:n] such that a[i] <= a[j] for all i
between 1 to m, and for all j between m+1 to n where 1<=m<=n.
Thus, the elements in a[1:m] and a[m+1:n] can be sorted independently
No need for merging
The rearrangement of the elements is accomplished by picking some element of a[],say
t = a[s],and then reordering the other elements so that all elements appearing before t
in a[1:n] are less than or equal to t and all elements appearing after t are greater than
or equal to t.
This rearranging is referred to as partitioning.](https://image.slidesharecdn.com/searchingandsortingmethods-250510103046-f3254d9c/85/Different-Searching-and-Sorting-Methods-pptx-25-320.jpg)



![Partition Algorithm
Algorithm Partition(a, m, p)
{
v:= a[m], i:= m, j:= p;
while(i < j)
{
while(a[i]<=v)
i++;
while(a[j]> v)
J--;
if(i<j)
{
temp:= a[i];
a[i]:= a[j];
a[j] := temp;
}
}
a[m]:= a[j];
a[j]= v;
return j;
}](https://image.slidesharecdn.com/searchingandsortingmethods-250510103046-f3254d9c/85/Different-Searching-and-Sorting-Methods-pptx-29-320.jpg)



![Selection Sort Algorithm
Algorithm Selectionsort(a,n)
{
for i:=1 to n-1 do
{
pos := i ;
pos:=Smallest(a, i, n, pos) ;
swap( a[i], a[pos] );
}
}](https://image.slidesharecdn.com/searchingandsortingmethods-250510103046-f3254d9c/85/Different-Searching-and-Sorting-Methods-pptx-33-320.jpg)
![Algorithm Smallest
Algorithm Smallest (a, i, n, pos)
small := a[i] ;
for j := i+1 to n do
{
if (small > a[j]) then
{
small = a[j] ;
pos := j ;
}
}
return pos;
}](https://image.slidesharecdn.com/searchingandsortingmethods-250510103046-f3254d9c/85/Different-Searching-and-Sorting-Methods-pptx-34-320.jpg)












Different Searching and Sorting Methods.pptx
- 1. Unit 2 Searching and Sorting Methods
- 2. Agenda • Linear Search, Binary Search • Bubble Sort, Merge Sort • Quick Sort, Selection Sort • Insertion Sort, Radix Sort, Bucket Sort • Complexity Issues of algorithms
- 3. Linear Search Linear Search is defined as a sequential search algorithm that starts at one end and goes through each element of a list until the desired element is found, otherwise the search continues till the end of the data set. It is the easiest searching algorithm. Algorithm Linear(A,n,x) { for(i:=0;i<n;i++) { If(a[i]=x) then return i; } return -1; }
- 4. Complexity Analysis : Summary 4 Case Number of key comparisons Asymptotic complexity Remark Case 1 T(n) = 1 T(n) = O(1) Best case Case 2 T(n) = n T(n) = O(n) Worst case Case 3 T(n) = O(n) Average case 2 1 ) ( n n T
- 8. Example -15,-6,0,7, 9, 23,54, 82,101,112,125, 131,142,151 and x=151, x=-14, x=9
- 9. Complexity Analysis: Best Case: In Binary search, best case occurs when the element to search is found in first comparison, i.e., when the first middle element itself is the element to be searched. The best-case time complexity of Binary search is O(1). Average Case : The average case time complexity of Binary search is O(logn) Worst Case: In Binary search, the worst case occurs, when we have to keep reducing the search space till it has only one element. The worst-case time complexity of Binary search is O(logn).
- 10. Sorting Sorting takes an unordered collection and makes it an ordered one. 5 12 35 42 77 101 1 2 3 4 5 6 5 12 35 42 77 101 1 2 3 4 5 6
- 11. Bubble Sort Traverse a collection of elements Move from the front to the end “Bubble” the largest value to the end using pair-wise comparisons and swapping 5 12 35 42 77 101 1 2 3 4 5 6
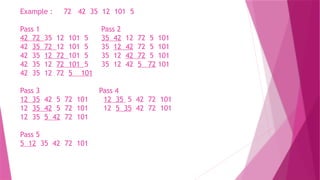
- 12. Example : 72 42 35 12 101 5 Pass 1 Pass 2 42 72 35 12 101 5 35 42 12 72 5 101 42 35 72 12 101 5 35 12 42 72 5 101 42 35 12 72 101 5 35 12 42 72 5 101 42 35 12 72 101 5 35 12 42 5 72 101 42 35 12 72 5 101 Pass 3 Pass 4 12 35 42 5 72 101 12 35 5 42 72 101 12 35 42 5 72 101 12 5 35 42 72 101 12 35 5 42 72 101 Pass 5 5 12 35 42 72 101
- 13. “Bubbling” All the Elements 77 12 35 42 5 1 2 3 4 5 6 101 5 42 12 35 77 1 2 3 4 5 6 101 42 5 35 12 77 1 2 3 4 5 6 101 42 35 5 12 77 1 2 3 4 5 6 101 42 35 12 5 77 1 2 3 4 5 6 101 N - 1
- 14. Reducing the Number of Comparisons 12 35 42 77 101 1 2 3 4 5 6 5 77 12 35 42 5 1 2 3 4 5 6 101 5 42 12 35 77 1 2 3 4 5 6 101 42 5 35 12 77 1 2 3 4 5 6 101 42 35 5 12 77 1 2 3 4 5 6 101
- 15. Bubble Sort Algorithm Algorithm Bubble_Sort(a, n) { for i := 1 to n – 1 do { // to keep track of the number of iterations for j := 0 to n –i-1 { // to compare the elements inside the particular iteration if (a[j] > a[j + 1]) then swap(a[j], a[j + 1]); // swap if any element is greater than its adjacent element } } }
- 16. Complexity Analysis • Best Case: The best case occurs when the array is already sorted. So the number of comparisons required is N-1 and the number of swaps required = 0. Hence the best case complexity is O(N). • Worst Case: The worst-case condition for bubble sort occurs when elements of the array are arranged in decreasing order. In the worst case, the total number of iterations or passes required to sort a given array is (N-1). where ‘N’ is the number of elements present in the array. • In each iteration Total number of swaps = Total number of comparison • Total number of comparison (Worst case) = N(N-1)/2 Total number of swaps (Worst case) = N(N-1)/2 • So worst case and average case time complexity is O(N2 ) as N2 is the highest order term.
- 17. Merge Sort array A[1..n] of n elements given, idea is to split the array in two sets say A[1]…… A[n/2] and A[n/2 + 1]……A[n]. Sort two sets of arrays individually. Merge two sorted sets of to produce a single sorted list of n elements as follows: • Repeat the following until no elements remain in one of the arrays: -compare the first elements in the remaining unprocessed portions of the arrays - copy the smaller of the two into A, while incrementing the index indicating the unprocessed portion of that array • Once all elements in one of the arrays are processed, copy the remaining unprocessed elements from the other array into A
- 20. Example a[1:10]=(310, 285, 179, 652, 351, 423, 861, 254, 450, 520) • Hand simulation • (310 285 179 652 351 | 423 861 254 450 520) split • (310 285 179 | 652 351 | 423 861 254 450 520) split • (310 285 | 179 | 652 351 | 423 861 254 450 520) split • (310 | 285 | 179 | 652 351 | 423 861 254 450 520) split • (285 310 | 179 | 652 351 | 423 861 254 450 520) merge • (179 285 310 | 652 351 | 423 861 254 450 520) merge • (179 285 310 | 652 | 351 | 423 861 254 450 520) split • (179 285 310 | 351 652 | 423 861 254 450 520) merge • (179 285 310 351 652 | 423 861 254 450 520) merge • (179 285 310 351 652 | 423 861 254 | 450 520) split • ……
- 21. Tree of calls of Merge Sort a[1:10]=(310, 285, 179, 652, 351, 423, 861, 254, 450, 520)
- 22. Tree of calls of Merge a[1:10]=(310, 285, 179, 652, 351, 423, 861, 254, 450, 520)
- 23. Example: a[1:8] = 50 10 25 30 15 70 35 55 Tree of calls of MergeSort Tree of calls of Merge
- 24. Analysis of Mergesort All cases have same efficiency O(n log n) Space complexity O(n)
- 25. Quick Sort Partitioning a[1:n] into two subarrays in such a way that sorted subarrays do not need to be merged later. This is accomplished by rearranging the elements in a[1:n] such that a[i] <= a[j] for all i between 1 to m, and for all j between m+1 to n where 1<=m<=n. Thus, the elements in a[1:m] and a[m+1:n] can be sorted independently No need for merging The rearrangement of the elements is accomplished by picking some element of a[],say t = a[s],and then reordering the other elements so that all elements appearing before t in a[1:n] are less than or equal to t and all elements appearing after t are greater than or equal to t. This rearranging is referred to as partitioning.
- 27. Example 15 22 13 27 12 10 20 25
- 28. Quick Sort Algorithm Algorithm Quicksort(first, last) { If(first < last) { J:= Partition(a, first, last); Quicksort(first, j-1); Quicksort(j+1, last); } }
- 29. Partition Algorithm Algorithm Partition(a, m, p) { v:= a[m], i:= m, j:= p; while(i < j) { while(a[i]<=v) i++; while(a[j]> v) J--; if(i<j) { temp:= a[i]; a[i]:= a[j]; a[j] := temp; } } a[m]:= a[j]; a[j]= v; return j; }
- 30. Analysis of Quicksort Worst-case time is The average time is O(n log n).
- 31. Selection Sort In selection sort, the smallest value among the unsorted elements of the array is selected in every pass and inserted to its appropriate position into the array. In this algorithm, the array is divided into two parts, first is sorted part, and another one is the unsorted part. Initially, the sorted part of the array is empty, and unsorted part is the given array. Sorted part is placed at the left, while the unsorted part is placed at the right. In selection sort, the first smallest element is selected from the unsorted array and placed at the first position. After that second smallest element is selected and placed in the second position. The process continues until the array is entirely sorted.
- 32. Example 12 29 25 8 32 17 40 8 29 25 12 32 17 40 8 12 25 29 32 17 40 8 12 17 29 32 25 40 8 12 17 25 32 29 40 8 12 17 25 29 32 40 8 12 17 25 29 32 40
- 33. Selection Sort Algorithm Algorithm Selectionsort(a,n) { for i:=1 to n-1 do { pos := i ; pos:=Smallest(a, i, n, pos) ; swap( a[i], a[pos] ); } }
- 34. Algorithm Smallest Algorithm Smallest (a, i, n, pos) small := a[i] ; for j := i+1 to n do { if (small > a[j]) then { small = a[j] ; pos := j ; } } return pos; }
- 35. Analysis of Selection Sort Best case, average case and worst case time complexity is
- 36. Insertion Sort Insertion sort, is an efficient algorithm for sorting a small number of elements. Insertion sort works the way many people sort a hand of playing cards. We start with an empty left hand and the cards face down on the table. We then remove one card at a time from the table and insert it into the correct position in the left hand. To find the correct position for a card, we compare it with each of the cards already in the hand, from right to left.
- 37. Example
- 39. Analysis Best case time complexity is Θ(n) Average case and worst case time complexity is
- 40. Radix Sort Digit-by-digit sort. Idea: Sort on least-significant digit first with auxiliary stable sort. Go from least to most significant digit.
- 41. Example
- 42. Radix Sort Example 170, 45, 75, 90, 802, 24, 2, 66
- 43. Algorithm
- 44. Bucket Sort Bucket sort assumes that the input is generated by a random process that distributes elements uniformly and independently over the interval (0, 1). Bucket sort divides the interval (0, 1) into n equal-sized subintervals, or buckets, and then distributes the n input numbers into the buckets. Since the inputs are uniformly and independently distributed over (0, 1), we do not expect many numbers to fall into each bucket. To produce the output, we simply sort the numbers in each bucket and then go through the buckets in order, listing the elements in each.
- 45. Algorithm
- 46. Example
- 47. Example 0.13, 0.8, 0.2, 0.7, 0.16, 0.18, 0.12, 0.1, 0.23, 0.11