













![A color model (also called color space or color system) is a
specification of a coordinate system and a subspace within that
system where each color is represented by a single point.
The RGB color model: In the RGB model, each color appears in its
primary spectral components of red, green, and blue. This model
is based on a Cartesian coordinate system. The color subspace
is the cube in which RGB values are at three corners; cyan,
magenta, and yellow are at three other corners; black is at the
origin; and white is at the corner farthest from the origin.
The gray scale (points of equal RGB values) extends from black to
white along the diagonal line joining these two points.
The different colors are points on or inside the cube, and are
defined by vectors extending from the origin.
All values of R, G. and B are assumed to be in the range [0, 1].
17
Color Models](https://image.slidesharecdn.com/day2-visualperception-200627104208/85/DIGITAL-IMAGE-PROCESSING-Visual-perception-DAY-2-17-320.jpg)














































![68
GRAY SCALE
• The interval [Lmin , Lmax ] is called thegray scale.
• Common practice is to shift this interval numerically to
the interval [0, L-1],
• where L = 0 is considered black and
L = L-1 is considered white on the gray scale.
All intermediate values are shades of gray varying from
black to white.](https://image.slidesharecdn.com/day2-visualperception-200627104208/85/DIGITAL-IMAGE-PROCESSING-Visual-perception-DAY-2-68-320.jpg)














DIGITAL IMAGE PROCESSING - Visual perception - DAY 2
- 1. Digital Image Processing DAY 2- 22/6/2020 TODAYS TOPICS: • Elements of Visual Perception • Image Sensing and Acquisition • Image Sampling and Quantization • Relationships between pixels
- 2. Elements of visual perception Human Eye, a 3D view 2
- 3. Elements of visual perception Human Eye, a 2D view 3
- 4. 1. A human eye, nearly a sphere with an average diameter of approximately 20 mm, is enclosed by three membranes: cornea and sclera, choroid and retina. 2. The Cornea is a tough & transparent tissue, covering the anterior surface of the eye. 3. The Sclera is an opaque membrane, enclosing the remainder of the eye globe. 4. The Choroid contains blood vessels to supply nutrients to the eye. It is heavily pigmented stopping external light and is divided into ciliary body and iris. 4 Elements of visual perception
- 5. 5. Center opening of iris, known as pupil, is about 2-8 mm in diameter. The front of iris is filled with visible pigments and its back with black pigments. 6. The lens, layers of fiberous cells, is having 60% to 70% H2O, 6% fat and rest protein. It is lightly yellowishly pigmented. 7. The retina is rich with cones and rods which are light receptors. 8. The cones, 6 to 7 millions in count are primarily located in the center of retina, known as fovea. They are responsible for photopic (bright light) vision-colour vision. 5 Elements of visual perception
- 6. 9. The rods, 75 to 150 millions in count, are distributed all over the retina. They are responsible for scotopic (dim light) vision- contrast. 10. An individual cone is connected to an individual optical nerve and hence accounts for perception of finer details. 11. Group of rods is connected to group of optical nerves and hence accounts for overall perception. 12. The blind spot in the eye is entirely deprived of the light receptors, rods and cones. 6 Elements of visual perception
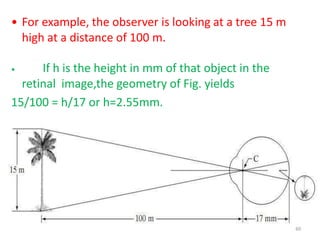
- 7. Image Formation in Human Eye H h D F The distance between the center of the lens and the retina, called the focal length, varies from approximately 17 mm to about 14 mm. The height, h of an object of height, H perceived by an observer, having a focal length, F, from a distance, D is given by the principle of similar triangle. D F 7 D H h h H F
- 8. Brightness Adaptation of Human Eye Subjective brightness is a logarithmic function of incident light intensity. 8
- 9. Brightness Adaptation of Human Eye 9 The brightness adaptation is a phenomenon which describes the ability of the human eye in simultaneously discriminating distinct intensity levels. The brightness adaptation level is the current sensitivity level of the visual system for any given set of conditions. The simultaneous contrast is a phenomenon which describes that the perceived brightness of a region in an image is not a simple function of its intensity rather it depends on the intensities of neighboring regions.
- 10. Brightness Adaptation of Human Eye The match bands are the adjacently spaced rectangular stripes of constant intensities to demonstrate the phenomenon of simultaneous contrast. Examples of simultaneous contrast. All the inner squares have the same 10 intensity, but theyprogressively darke r appear as the background becomes lighter.
- 11. Illusion of a white square Illusion of a white circle Illusion of a white circle 11
- 12. Illusion of loss of parallelism & co- planarity 12
- 13. A “color” of a light is determined by its wavelength. Any object absorbs and reflects light energy wavelengths. 13 at particula r The perceived color of an object is determined by the wavelength of the light reflected from it. The object that absorbs the light energy at all wavelength “looks” black to the perceiver while the object that reflects the light energy at all wavelengths “looks” white to the perceiver. Color Fundamentals
- 14. Achromatic light – Black and White (and their shades, gray shades). Chromatic light – Colors (and their shades). Three basic quantities are used to describe the quality of a chromatic light source: radiance, luminance, and brightness. Radiance is the total amount of energy that flows from the light source, and it is usually measured in watts (W). Luminance, measured in lumens (lm), gives a measure of the amount of energy an observer perceives from a light source. Brightness is a subjective descriptor that is practically impossible to measure. 14 Color Fundamentals
- 15. Cones are the sensors in the eye responsible for color vision. Approximately 65% of all cones are sensitive to red light, 33% are sensitive to green light, and only about 2% are sensitive to blue. Due to these absorption characteristics of the human eye, colors arc seen as variable combinations of the so-called primary colors red (R), green (G), and blue (B). The characteristics generally used to distinguish one color from another are brightness, hue, and saturation. Brightness embodies the chromatic notion of intensity. Hue is an attribute associated with the dominant wavelength in a mixture of light waves. Saturation refers to the relative purity or the amount of white light mixed with a hue. Hue and saturation taken together are called Chromaticity. 15 Color Fundamentals
- 16. The amounts of red, green, and blue needed to form any particular color are called the tristimidus values and are denoted, X, Y, and Z, respectively. A color is then specified by its trichromatic coefficients, defined as Color Fundamentals 16
- 17. A color model (also called color space or color system) is a specification of a coordinate system and a subspace within that system where each color is represented by a single point. The RGB color model: In the RGB model, each color appears in its primary spectral components of red, green, and blue. This model is based on a Cartesian coordinate system. The color subspace is the cube in which RGB values are at three corners; cyan, magenta, and yellow are at three other corners; black is at the origin; and white is at the corner farthest from the origin. The gray scale (points of equal RGB values) extends from black to white along the diagonal line joining these two points. The different colors are points on or inside the cube, and are defined by vectors extending from the origin. All values of R, G. and B are assumed to be in the range [0, 1]. 17 Color Models
- 18. Color Models The RGB color model 18
- 19. Merits of RGB color model: (i) Well suited for hardware implementations and (ii) Matches nicely with the fact that the human eye is strongly perceptive to red, green, and blue primary colors. Demerits of RGB color model: Not well suited for describing colors in terms that are practical for human interpretation. The HSI color model: A color perceived by a human eye is described by its Hue, Saturation and Intensity. HSI (Hue, Saturation and Intensity) color model thus decouples the intensity component from the color-carrying information (hue and saturation). 19 Color Models
- 20. Forming the HSI color model from the RGB color model 23 The HSI coordinate system and corresponding color subspace is obtained as follows: The RGB color cube rotated such that the cube is standing on its black vertex with the white vertex directly above and the cyan, blue, green, red, yellow and magenta vertices forming a hexagon as shown below. The dot is an arbitrary color point. The angle from the red axis gives the hue, and the length of the vector is the saturation. The intensity of all colors in any of these planes is given by the position of the plane on the vertical intensity axis. Color Models
- 21. Color Models The HSI color model 21
- 22. Principle of Video Camera: Vidicon Vidicon Camera Tube – Cross Sectional View 22
- 23. Construction The Vidicon came into general use in the early 50’s and gained immediate popularity because of its small size and ease of operation. It functions on the principle of photoconductivity, where the resistance of the target material shows a marked decrease when exposed to light. The target consists of a thin photo conductive layer of either selenium or anti-mony compounds. This is deposited on a transparent conducting film, coated on the inner surface of the face plate. This conductive coating is known as signal electrode or plate. Image side of the photolayer, which is in contact with the signal electrode, is connected to DC supply through the load resistance RL. 23 Principle of Video Camera: Vidicon
- 24. The beam that emerges from the electron gun is focused on surface of the photo conductive layer by combined action of uniform magnetic field of an external coil. The electrostatic field of grid No 3. Grid No. 4 provides a uniform decelerating field between itself, and the photo conductive layer, so that the electron beam approaches the layer with a low velocity to prevent any secondary emission. Deflection of the beam, for scanning the target, is obtained by vertical and horizontal deflecting coils, placed around the tube. 24 Principle of Video Camera: Vidicon
- 25. Principle of Video Camera: Vidicon Circuit for output current for Vidicon Camera 25
- 26. Charge Image The photolayer has a thickness of about 0.0001 cm, and behaves like an insulator with a resistance of approximately 20 M when in dark. When bright light falls on any area of the photoconductive coating, resistance across the thickness of that portion gets reduces to about 2 M. Thus, with an image on the target, each point on the gun side of the photolayer assumes a certain potential with respect to the DC supply, depending on its resistance to the signal plate. A pattern of positive potentials appears, on the gun side of the photolayer, producing a charge image, that corresponds to the incident optical image. 26 Principle of Video Camera: Vidicon
- 27. Another way of explaining the development of ‘charge image’ on the photolayer is to consider it as an array of individual target elements, each consisting of a capacitor paralleled with a light dependent resistor. One end of these target elements is connected to the signal electrode and the other end is unterminated facing the beam. Storage Action Each element of the photocoating is scanned at intervals equal to the frame time. This results in storage action and the net change in resistance, at any point or element on the photoconductive layer, depends on the time, which elapses between two successive scannings and the intensity of incident light. Since storage time for all points on the target plate is same, the net change in resistance of all elementary areas is proportional to light intensity variations in the scene being televised. 27 Principle of Video Camera: Vidicon
- 28. Signal Current As the beam scans the target plate, it encounters different positive potentials on the side of the photolayer that faces the gun. Sufficient number of electrons from the beam is then deposited on the photolayer surface to reduce the potential of each element towards the zero cathode potential. The remaining electrons, not deposited on the target, return back and are not utilized in the vidicon. The sudden change in potential on each element while the beam scans, causes a current flow in the signal electrode circuit producing a varying voltage across the load resistance RL. The amplitude of current and the consequent output voltage across RL are directly proportional to the light intensity variations on the scene. 28 Principle of Video Camera: Vidicon
- 29. Principle of Still Camera: Charge Coupled Devices: A MOS capacitor as a light sensitive device 1 SiO2 n- channel p- substrate Polysilico n Gate Polysilicon 3 Gate Polysilicon 2 Gate Potential well made by depletion layer Photon s Photonicall y liberated electrons 29
- 30. Principle of Still Camera: Charge Coupled Devices: A MOS capacitor as a light sensitive device 1 2 3 1 2 3 1 2 3 p-substrate p-substrate SiO2 n- channel Polysilico n Gate 30
- 31. Charge Coupled Devices (CCD) The operation of solid state image scanners is based on the functioning of charge coupled devices (CCDs) which is a new concept in metal- oxide-semiconductor (MOS) circuitry. The CCD may be thought of to be a shift register formed by a string of very closely spaced MOS capacitors. It can store and transfer analog charge signals— either electrons or holes—that may be introduced electrically or optically. Construction The chip consists of a p-type substrate, the one side of which is oxidized to form a film of silicon dioxide, which is an insulator. Then by photolithographic processes, similar to those used in miniature integrated circuits an array of metal electrodes, known as gates, are deposited on the insulator film. This results in the creation of a very large number of tiny MOS capacitors on the entire surface of the chip. 31 Principle of Still Camera: Charge Coupled Devices:
- 32. Principle of Operation The application of small positive potentials to the gate electrodes results in the development of depletion regions just below them. These are called potential wells. The depth of each well (depletion region) varies with the magnitude of the applied potential. The gate electrodes operate in groups of three, with every third electrode connected to a common conductor. The spots under them serve as light sensitive elements. When any image is focused onto the silicon chip, electrons are generated within it, but very close to the surface. The number of electrons depends on the intensity of incident light. Once produced they collect in the nearby potential wells. As a result the pattern of collected charges represents the optical image. 32 Principle of Still Camera: Charge Coupled Devices:
- 33. Principle of Operation Charge Transfer The charge of one element is transferred to another along the surface of the silicon chip by applying a more positive voltage to the adjacent electrode or gate, while reducing the voltage on it. The manner in which the transition takes place from potential wells is illustrated in the figure. This is achieved with the influence of continuing clock pulses. The clocking sequence continues and the charge finally reaches the end of the array where it is collected to form the signal current. 33 Principle of Still Camera: Charge Coupled Devices:
- 34. Principle of Still Camera: Charge Coupled Devices: CCD Readout 34
- 35. Principle of Operation CCD Readout The two-dimensional array of potential wells is generally referred to as parallel register. A one-dimensional CCD array acts as a serial register and plays an important role during the CCD readout operation. A programmed sequence of changing gate potentials causes all charge packets stored in the parallel register to be shifted in parallel one row toward the serial register. The charge stored in the top row is shifted from the parallel register to the serial register. Once in the serial register, the charge packets are individually shifted toward the output amplifier. 35 Principle of Still Camera: Charge Coupled Devices:
- 36. An (monochrome or black & white) image is a 2-D light- intensity function denoted as f(x,y). The value or amplitude, f of the function at any spatial coordinates (x,y) is the intensity of the image at that point. As light is energy, this value is non-zero and finite i.e., 0 f f(x,y) has two components: (i) i(x,y), the amount of light incident on the scene being viewed and (ii) r(x,y), the reflectance relating to the amount of light reflected by the objects in the scene i.e., f(x,y) = i(x,y) r(x,y) where 0 i & 0 r 1 36 (Monochrome) Image model
- 37. For a monochrome image the intensity of the image, f at any coordinates (x,y) is termed as gray level, l of the image at that point, i.e., Lmin l Lmax 0 l L, 0 black & L white Intermediate values shades of gray or gray shades 37 (Monochrome) Image model
- 38. To obtain a digital image, f(x,y) must be digitized both in space and amplitude. -digitization of spatial coordinates - image sampling -digitization of amplitude - gray-level quantization The image sampling is viewed as partitioning an image plane into a grid with coordinates of center of each grid from an integer set ZZ. The (gray-level) quantization is viewed as assigning a value from a real number set R as gray level to each grid. Hence resulting digital image is a MN matrix in which each matrix element represents a image element or picture element or pixel and its value represents the gray level of that pixel. 38 Sampling and quantization
- 39. Sampling and quantization 39 f(0,N1) f f(0,0) f(1,0) f(0,1) f(1,1) f(0,2) f(1,2) (M1,0)f(M1,1)f(M1,2) f(M1,N1) f(1,N1)
- 40. The number of samples or pixels, MN required to approximate an image is known as spatial resolution of the image. The low or insufficient spatial resolution results in pixel replication causing a checkerboard effect. Sampling and quantization Effect of spatial resolution – checkerboard effect 40
- 41. The number of discrete gray levels, G allowed for a pixel in a digital image is known as gray-level resolution of the image. The low or insufficient gray-level resolution results in ridge-like structures in smooth areas causing false contouring. 41 Sampling and quantization
- 42. Effect of gray-level resolution – false contouring: Original 8-bit image 42
- 43. Effect of gray-level resolution – false contouring: Original 4-bit image 43
- 44. Effect of gray-level resolution – false contouring: Original 2-bit image 44
- 45. Effect of gray-level resolution – false contouring: Original 1-bit image, binary image 45
- 46. •
- 48. 48 • The eye is nearly a sphere, with an average diameter of approximately 20mm. • Three membranes enclose the eye: • The cornea and sclera outer cover the choroid the retina.
- 49. 49 Cornea • The cornea is a tough, transparent tissue that covers the anterior surface of the eye. • Continuous with the cornea,the sclera is an opaque membrane that encloses the remainder of the optic globe.
- 50. 50 Choroid • The choroid lies directly below the sclera. • This membrane contains a net- work of blood vessels that serve as the major source of nutrition to the eye. • The choroid coat is heavily pigmented and hence helps to reduce the amount of extraneous light entering the eye and the backscatter within the optical globe.
- 51. 51 • At its anterior extreme, the choroid is divided into the ciliary body and the iris diaphragm. • The latter contracts or expands to control the amount of light that enters the eye • Thefront of the iris contains the visible pigment of the eye, whereas the back contains a black pigment.
- 52. 52 • The lens is made up of concentric layers of fibrous cells and is suspended by fibers that attach to the ciliary body. • It contains 60 to 70% water, about 6% fat, and more protein than any other tissue in the eye.
- 53. 53 Retina • The innermost membrane of the eye is the retina, which lines the Inside of the ǁall’s entire posterior portion. • When the eye is properly focused, light from an object outside the eye is imaged on the retina. • Pattern vision is afforded by the distribution of discrete light receptors over the surface of the retina.
- 54. 54 • There are two classes of receptors: cones and rods. • The cones in each eye number between 6 and 7 million. • They are located primarily in the central portion of the retina, called the fovea, and are highly sensitive to color.
- 55. 55 • Muscles controlling the eye rotate the eyeball until the image of an object of interest falls on the fovea. • Cone vision is called photopic or bright-light vision. • The number of rods is much larger: Some 75 to 150 million are distributed over the retinal surface.
- 56. • Figure shows the density of rods and cones for a cross section of the right eye passing through the region of emergence of the optic nerve from the eye. 56
- 57. 57 • The absence of receptors in this area results in the so-called blind spot. • Fig. shows that cones are most dense in the center of the retina (in the center area of the fovea)
- 58. Image Formation in the Eye • The principal difference between the lens of the eye and an ordinary optical lens is that the former is flexible. • The shape of the lens is controlled by tension in the fibers of the ciliary body. • To focus on distant objects, the controlling muscles cause the lens to be relatively flattened. • Similarly, these muscles allow the lens to becomethicker in order to focus on objects near the eye. 24
- 59. 59 • The distance between the center of the lens and the approximately 17 mm to about 14 retina called the focal length varies mm, from as t he refractive power of the lens increases from its minimum to its maximum. • When the eye focuses on an object farther away the lens exhibits its lowest refractive power. • When the eye focuses on a nearby object, the lens is most strongly refractive.
- 60. • For example, the observer is looking at a tree 15 m high at a distance of 100 m. • If h is the height in mm of that object in the retinal image,the geometry of Fig. yields 15/100 = h/17 or h=2.55mm. 60
- 61. 61 Light and the Electromagnetic Spectrum • Sir Isaac Newton discovered that when a beam of sunlight is passed through a glass prism, • The emerging beam of light is not white but consists instead of a continuous spectrum of colors ranging from violet at one end to red at the other.
- 63. 63 • The electromagnetic spectrum can be expressed in terms of wavelength, frequency, or energy. • Wavelength (l)and frequency (n)are related by the expression • where c is the speed of light (2.998*108 m s) • The energy of the electromagnetic spectrum is given by the expression E = hv • where h is Plank”s constant
- 64. 64 A Simple Image Formation Model • Images by two-dimensional functions of the form f(x, y). • The value or amplitude of f at spatial coordinates (x, y) gives the intensity (brightness) of the image at that point. • As light is a form of energy, f(x,y) must be non zero and finite.
- 65. 65 • The function f(x, y) may be characterized by two components: (1)the amount of source illumination incident on the scene being viewed (2)the amount of illumination reflected by the objects in the scene. • These are called the illumination and reflectance components and are denoted by i(x, y) and r(x, y), respectively.
- 66. 66 • The two functions combine as a product to form f(x, y): f(x, y) = i(x, y) r(x, y) r(x, y) = 0 --- total absorption 1 --- total reflection
- 67. • The intensity of a monochrome image f at any coordinates (x, y) the gray level (l) of the image at that point. That is, l = f(x0 , y0 ) L lies in the range 67
- 68. 68 GRAY SCALE • The interval [Lmin , Lmax ] is called thegray scale. • Common practice is to shift this interval numerically to the interval [0, L-1], • where L = 0 is considered black and L = L-1 is considered white on the gray scale. All intermediate values are shades of gray varying from black to white.
- 69. 69 Basic Relationships Between Pixels • 1. Neighbors of a Pixel :- A pixel p at coordinates (x, y) has four horizontal and vertical neighbors whose coordinates are given by (x+1, y), (x-1, y), (x, y+1), (x, y-1) • This set of pixels, called the 4-neighbors of p, is denoted by N4(p). • Each pixel is a unit distance from (x, y), and some of the neighbors of p lie outside the digital image if (x, y) is on the border of the image.
- 70. 70 ND(p) and N8(p) • The four diagonal neighbors of p have coordinates (x+1, y+1), (x+1, y-1), (x-1, y+1), (x-1, y-1) and are denoted by ND(p). • These points, together with the 4-neighbors, arecalled the 8- neighbors of p, denoted by N8(p). • If some of the points in ND(p) and N8(p) fall outside the image if (x, y) is on the border of theimage.
- 71. 71 Adjacency, Connectivity, Regions, and Boundaries•To establish whether two pixels are connected, it must be determined if they are neighbors and •if their gray levels satisfy a specified criterion of similarity (say, if their gray levels are equal). •For instance, in a binary image with values 0 and 1, two pixels may be 4-neighbors, •but they are said to be connected only if they have the same value
- 72. 72 • Let V be the set of gray-level values used todefine connectivity. In a binary image, V={1} for the connectivity of pixels with value 1. • In a grayscale image, for connectivity of pixels with a range of intensity values of say 32, 64 V typically contains more elements. • For example, • In the adjacency of pixels with a range of possible gray- level values 0 to 255, • set V could be any subset of these 256 values.We consider three types of adjacency:
- 73. • We consider three types of adjacency: (a) 4-adjacency. Two pixels p and q with values from V are 4-adjacent if q is in the set N4(p). (b) 8-adjacency. Two pixels p and q with values from V are 8-adjacent if q is in the set N8(p). (c) m-adjacency (mixed adjacency). (d) Two pixels p and q with values from V are m-adjacent if • (i) q is in N4(p), or • (ii) q is in ND(p) and theset whose values are from V. 73
- 74. • A path from pixel p with coordinates (x, y) to pixel q with coordinates (s, t) is a sequence of distinct pixels with coordinates • where (xϬ’ y0) = (x, y) and (xŶ’ yn) = (s, t), (xi’ yi) and (xi-ϭ’ yi-1) pixels and are adjacent for ϭ ч i ч Ŷ. IŶ this Đase, Ŷ is the length of the path. • If (xϬ’ y0) = (xŶ’ yn) the path is a closedpath. 74
- 75. . •Two pixels p and q are said to be connected in S if there exists a path between them consisting entirely of pixels in S. •For any pixel p in S, the set of pixels that are connected to it in S is called a connected component of S. 75
- 76. 76 Relations, equivalence • A binary relation R on a set A is a set of pairs of elements from A. If the pair (a, b) is in R, the notation used is aRb ( ie a is related to b) • Ex:- the set of points A = { p1,p2,p3,p4} arranged as P1p2 P3 p4
- 77. 77 • In this case R is set of pairs of points from A that are 4- connected that is R = {(p1,p2), (p2,p1), (p1,p3), (p3,p1)} . thus p1 is related to p2 and p1 is related to p3 and vice versa but p4 is not related to any other point under the relation .
- 78. 78 Reflective - Symmetric - Transitive • Reflective if for each a in A, aRb • Symmetric if for each a and b in A, aRb implies bRa • Transitive if for a, b and c in A, aRb and bRc implies aRc A relation satisfying the three properties is called an equivalence relation.
- 79. Distance Measures • For pixels p, q,and z,with coordinates (x, y), (s, t),and (u, v) respectively, D is a distance function or metric if (a) D(p, q)D;p, if p = q ), (b) D(p, q) = D(q, p) The Euclidean distance between p and q is defined as 79
- 80. . • The D4 distance (also called city-block distance) between p and q is defined as D4 (p, q) = | x - s | + | y – t | •For example, the pixels with D4 distance ч Ϯ from (x, y) (the center point) form the following contours of constant distance: • The pixels with D4=1 are the 4-neighbors of (x, y). 80
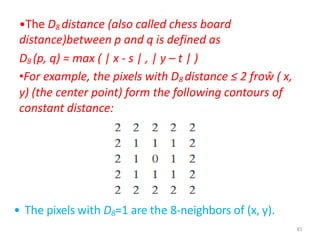
- 81. . •The D8 distance (also called chess board distance)between p and q is defined as D8 (p, q) = max ( | x - s | , | y – t | ) •For example, the pixels with D8 distance ≤ 2 froŵ ( x, y) (the center point) form the following contours of constant distance: • The pixels with D8=1 are the 8-neighbors of (x, y). 81
- 82. 82 • The Dm distance between two points is defined as the shortest m-path between the points. • In this case, the distance between two pixels will depend on the values of the pixels along the path, as well as the values of their neighbors. • For instance, consider the following arrangement of pixels and assume that p, p2 and p4 have value 1 and that p1 and p3 can have a value of 0 or 1: p3 p4 p2P1 p
- 83. 83 . • If only connectivity of pixels valued 1 is allowed, and p1 and p3 are 0 then the m distance between p and p4 is 2. • If either p1 or p3 is 1, the distance is 3 • If both pi and p2 are 1, the distance is 4