Embedded Android : System Development - Part II (Linux device drivers)
4 likes6,305 views

The document provides an extensive introduction to Linux device drivers, covering essential skills like C programming, Linux file systems, and kernel source management. It explains character, block, and USB drivers, including driver registration, file operations, memory access, and debugging. Additionally, it outlines the practical aspects of driver development with hands-on examples, kernel interaction, and I/O control APIs.
































![The I/O Control API
●
int (*ioctl)(struct inode *, struct file *, unsigned int cmd, unsigned long arg)
●
int (*unlocked_ioctl)(struct file *, unsigned int cmd, unsigned long arg)
●
Command
– <linux/ioctl.h> -> ... -> <asm-generic/ioctl.h>
– Macros
●
_IO, _IOR, _IOW, _IOWR
– Parameters
●
type (Magic character) [15:8]
●
number (index) [7:0]
●
size (param type) [29:16]](https://image.slidesharecdn.com/d2-androidsystemdevelopmentldd-170226160641/85/Embedded-Android-System-Development-Part-II-Linux-device-drivers-33-320.jpg)
](https://image.slidesharecdn.com/d2-androidsystemdevelopmentldd-170226160641/85/Embedded-Android-System-Development-Part-II-Linux-device-drivers-34-320.jpg)




;
● unsigned int iowrite[8|16|32](u[8|16|32] value, void *addr);
●
Barriers
– #include <linux/kernel.h>: void barrier(void);
– #include <asm/system.h>: void [r|w|]mb(void);](https://image.slidesharecdn.com/d2-androidsystemdevelopmentldd-170226160641/85/Embedded-Android-System-Development-Part-II-Linux-device-drivers-40-320.jpg)

;
● void out[b|w|l](unsigned [char|short|int] value,
unsigned port);](https://image.slidesharecdn.com/d2-androidsystemdevelopmentldd-170226160641/85/Embedded-Android-System-Development-Part-II-Linux-device-drivers-42-320.jpg)

Embedded Android : System Development - Part II (Linux device drivers)
- 1. Team Emertxe Linux Device Drivers An Introduction
- 2. Introduction
- 3. Familiarity Check ● Good C & Programming Skills ● Linux & the Filesytem – Root, User Space Headers & Libraries ● Files – Regular, Special, Device ● Toolchain – gcc & friends ● Make & Makefiles ● Kernel Sources (Location & Building)
- 4. The Flow ● Introduction – Linux kernel Ecosystem – Kernel Souce Organization – Command set and Files – Writing the first driver (Module) ● Character Drivers – Device files – Device access from user space (End to End flow) – Registering the driver – File Operations and registration – Data transfer between User and Kernel space – ioctl ● Memory & Hardware ● Time & Timings ● USB Drivers ● Interrupt Handling ● Block Drivers ● PCI Drivers ● Debugging
- 5. The Flow... ● Introduction – Linux kernel Ecosystem – Kernel Souce Organization – Command set and Files – Writing the first driver (Module) ● Character Drivers – Device files – Device access from user space (End to End flow) ● Memory & Hardware ● Time & Timings ● USB Drivers ● Interrupt Handling ● Block Drivers ● PCI Drivers ● Debugging
- 6. Hands-On ● Your First Driver ● Character Drivers – Null Driver – Memory Driver – UART Driver for Customized Hardware ● USB Drivers – USB Device Hot-plug-ability – USB to Serial Hardware Driver ● Filesystem Modules – VFS Interfacing – “Pseudo” File System with Memory Files
- 7. Linux Driver Ecosystem bash gvim X Server gcc firefox ` ` Process Management ssh Memory Management File Systems Device Control Networking Architecture Dependent Code Character Devices Memory Manager Filesystem Types Block Devices Network Subsystem IF Devices Concurrency MultiTasking Virtual Memory Files & Dirs: The VFS Ttys & Device Access Connectivity CPU Memory Disks & CDs Consoles, etc Network Interfaces
- 8. Kernel Source Organization Kernel Source include net drivers block fs mm kernel arch char mtd/ide net pci ...usbserial asm-<arch>linux arm powerpc sparc x86 ...
- 9. The Locations & Config Files ● Kernel Source Path: /usr/src/linux ● Std Modules Path: – /lib/modules/<kernel version>/kernel/... ● Module Configuration: /etc/modprobe.conf ● Kernel Windows: – /proc – /sys ● System Logs: /var/log/messages
- 11. The Kernel's C ● ctor & dtor – init_module, cleanup_module ● printf – printk ● Libraries – <kernel src>/kernel ● Headers – <kernel src>/include
- 12. The Init Code static int __init mfd_init(void) { printk(KERN_INFO "mfd registered"); ... return 0; } module_init(mfd_init);
- 13. The Cleanup Code static void __exit mfd_exit(void) { printk(KERN_INFO "mfd deregistered"); ... } module_exit(mfd_exit);
- 14. Usage of printk ● <linux/kernel.h> ● Constant String for Log Level – KERN_EMERG "<0>" /* system is unusable */ – KERN_ALERT "<1>" /* action must be taken immediately */ – KERN_CRIT "<2>" /* critical conditions */ – KERN_ERR "<3>" /* error conditions */ – KERN_WARNING "<4>" /* warning conditions */ – KERN_NOTICE "<5>" /* normal but significant condition */ – KERN_INFO "<6>" /* informational */ – KERN_DEBUG "<7>" /* debug-level messages */ ● printf like arguments
- 15. The Other Basics & Ornaments ● Headers – #include <linux/module.h> – #include <linux/version.h> – #include <linux/kernel.h> ● MODULE_LICENSE("GPL"); ● MODULE_AUTHOR("Emertxe"); ● MODULE_DESCRIPTION("First Device Driver");
- 16. Building the Module ● Our driver needs – The Kernel Headers for Prototypes – The Kernel Functions for Functionality – The Kernel Build System & the Makefile for Building ● Two options – Building under Kernel Source Tree ● Put our driver under drivers folder ● Edit Kconfig(s) & Makefile to include our driver – Create our own Makefile to do the right invocation
- 17. Our Makefile ifneq (${KERNELRELEASE},) obj-m += <module>.o else KERNEL_SOURCE := <kernel source directory path> PWD := $(shell pwd) default: $(MAKE) -C ${KERNEL_SOURCE} SUBDIRS=$(PWD) modules clean: $(MAKE) -C ${KERNEL_SOURCE} SUBDIRS=$(PWD) clean endif
- 18. Try Out your First Driver
- 20. Major & Minor Number ● ls -l /dev ● Major is to Driver; Minor is to Device ● <linux/types.h> (>= 2.6.0) – dev_t: 12 & 20 bits for major & minor ● <linux/kdev_t.h> – MAJOR(dev_t dev) – MINOR(dev_t dev) – MKDEV(int major, int minor)
- 21. Registering & Unregistering ● Registering the Device Driver – int register_chrdev_region(dev_t first, unsigned int count, char *name); – int alloc_chrdev_region(dev_t *dev, unsigned int firstminor, unsigned int cnt, char *name); ● Unregistering the Device Driver – void unregister_chrdev_region(dev_t first, unsigned int count); ● Header: <linux/fs.h>
- 22. The file operations ● #include <linux/fs.h> ● struct file_operations – int (*open)(struct inode *, struct file *); – int (*release)(struct inode *, struct file *); – ssize_t (*read)(struct file *, char __user *, size_t, loff_t *); – ssize_t (*write)(struct file *, const char __user *, size_t, loff_t *); – struct module owner = THIS_MODULE; / linux/module.h> */ – loff_t (*llseek)(struct file *, loff_t, int); – int (*ioctl)(struct inode *, struct file *, unsigned int, unsigned long);
- 23. User level I/O ● int open(const char *path, int oflag, ... ) ● int close(int fd); ● ssize_t write(int fd, const void *buf, size_t nbyte) ● ssize_t read(int fd, void *buf, size_t nbyte) ● int ioctl(int d, int request, ...) – The ioctl() function manipulates the underlying device parameters of special files. – The argument d must be an open file descriptor. – The second argument is a device-dependent request code.
- 24. The file & inode structures ● struct file – mode_t f_mode – loff_t f_pos – unsigned int f_flags – struct file_operations *f_op – void * private_data ● struct inode – unsigned int iminor(struct inode *); – unsigned int imajor(struct inode *);
- 25. Registering the file operations ● #include <linux/cdev.h> ● 1st way initialization: – struct cdev *my_cdev = cdev_alloc(); – my_cdev->owner = THIS_MODULE; – my_cdev->ops = &my_fops; ● 2nd way initialization: – struct cdev my_cdev; – cdev_init(&my_cdev, &my_fops); – my_cdev.owner = THIS_MODULE; – my_cdev.ops = &my_fops;
- 26. Registering the file operations... ● The Registration – int cdev_add(struct cdev *cdev, dev_t num, unsigned int count); ● The Unregistration – void cdev_del(struct cdev *cdev);
- 27. Registering/Unregistering Old Way ● Registering the Device Driver – int register_chrdev(undigned int major, const char *name, struct file_operations *fops); ● Unregistering the Device Driver – int unregister_chrdev(undigned int major, const char *name);
- 28. The read flow struct file ------------------------- f_count f_flags f_mode ------------------------- f_pos ------------------------- ... ... ssize_t my_read(struct file *f, char __user *buf, size_t cnt, loff_t *off) Buffer (in the driver) Buffer (in the application or libc) Kernel Space (Non-swappable) User Space (Swappable) copy_to_user
- 29. The /dev/null read & write ssize_t my_read(struct file *f, char __user *buf, size_t cnt, loff_t *off) { ... return read_cnt; } ssize_t my_write(struct file *f, char __user *buf, size_t cnt, loff_t *off) { ... return wrote_cnt; }
- 30. The mem device read ssize_t my_read(struct file *f, char __user *buf, size_t cnt, loff_t *off) { ... if (copy_to_user(buf, from, cnt) != 0) { return -EFAULT; } ... return read_cnt; }
- 31. The mem device write ssize_t my_write(struct file *f, char __user *buf, size_t cnt, loff_t *off) { ... if (copy_from_user(to, buf, cnt) != 0) { return -EFAULT; } ... return wrote_cnt; }
- 32. Dynamic Device Node & Classes ● Class Operations – struct class *class_create(struct module *owner, char *name); – void class_destroy(struct class *cl); ● Device into & Out of Class – struct class_device *device_create(struct class *cl, NULL, dev_t devnum, NULL, const char *fmt, ...); – void device_destroy(struct class *cl, dev_t devnum);
- 33. The I/O Control API ● int (*ioctl)(struct inode *, struct file *, unsigned int cmd, unsigned long arg) ● int (*unlocked_ioctl)(struct file *, unsigned int cmd, unsigned long arg) ● Command – <linux/ioctl.h> -> ... -> <asm-generic/ioctl.h> – Macros ● _IO, _IOR, _IOW, _IOWR – Parameters ● type (Magic character) [15:8] ● number (index) [7:0] ● size (param type) [29:16]
- 34. The I/O Control API ● Macro Usage _IO(type, index) [_IOR | _IOW | _IOWR](type, index, datatype/size)
- 35. Module Parameters ● <linux/moduleparam.h> – Macros ● module_param(name, type, perm) ● module_param_array(name, type, num, perm) ● Perm (is a bitmask) – 0 – S_IRUGO – S_IWUSR | S_IRUGO – Loading ● insmod driver.ko name=10
- 37. Memory Access
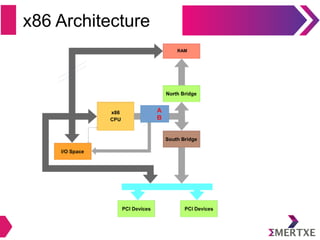
- 38. Physical Vs Virtual Memory ● The kernel Organizes Physical memory in to pages – Page size Depends on Arch ● X86-based 4096 bytes ● On 32-bit X86 system Kernel total Virtual address space – Total 4GB (pointer size) – Kernel Configuration Splits 4GB in to ● 3BG Virtual Sp for US ● 1GB Virtual Sp for Kernel – 128MB KDS – Virtual Address also called “Logical Address”
- 39. Memory Access from Kernel Space ● Virtual Address on Physical Address – #include <linux/gfp.h> ● unsigned long __get_free_pages(flags, order); etc ● void free_pages(addr, order); etc – #include <linux/slab.h> ● void *kmalloc(size_t size, gfp_t flags); – GFP_ATOMIC, GFP_KERNEL, GFP_DMA ● void kfree(void *obj); – #include <linux/vmalloc.h> ● void *vmalloc(unsigned long size); ● void vfree(void *addr);
- 40. Memory Access from Kernel Space... ● Virtual Address for Bus/IO Address – #include <asm/io.h> ● void *ioremap(unsigned long offset, unsigned long size); ● void iounmap(void *addr); ● I/O Memory Access – #include <asm/io.h> ● unsigned int ioread[8|16|32](void *addr); ● unsigned int iowrite[8|16|32](u[8|16|32] value, void *addr); ● Barriers – #include <linux/kernel.h>: void barrier(void); – #include <asm/system.h>: void [r|w|]mb(void);
- 41. Hardware Access
- 42. I/O Accesses from Kernel Space ● I/O Port Access – #include <asm/io.h> ● unsigned in[b|w|l](unsigned port); ● void out[b|w|l](unsigned [char|short|int] value, unsigned port);