IoT and the Autonomous Vehicle in the Clouds: Simultaneous Localization and Mapping (SLAM) with Kafka and Spark Streaming: Spark Summit East talk by Jay White Bear

Processing real-time analytics of big data streams from sensor data will continue to be an important task as embedded technology increases and we continue to generate new types and ways of data analysis, particularly in regard to the Internet of Things (IoT). Robotics models many of these key challenges well and incorporates the possibility of high- throughput streams as well as complex online machine learning and analytics algorithms. These challenges make it an almost ideal candidate for in depth analysis of real-time streaming analytics. We look at a simultaneous localization and mapping (SLAM) problem, an ongoing research area in robotics for autonomous vehicles, and well recognized as a non-trivial problem space in both industry and research. We will use a new integrated framework on Kafka and Spark Streaming to explore a constrained SLAM problem using online algorithms to navigate and map a space in real time. We present benchmarks of our open-source robot’s integration with Kafka and Spark Streaming for performance against other SLAM algorithms currently in use, explore some of the challenges we faced in our implementation, and make recommendations for improvement of performance and optimization on our framework. Finally, new to this talk, we demo real-time usage of our implementation with the Turtlebot II and explore relevant benchmarks and their implications on the future of autonomous vehicles in the IoT and cloud analytics space.







![Why SLAM on IoT?
SLAM in IoT
••"[SLAM] is one of the fundamental challenges of robotics . . . [but it] seems that almost all the current approaches
can not perform consistent maps for large areas, mainly due to the increase of the computational cost and due
to the uncertainties that become prohibitive when the scenario becomes larger."[12] Generally, complete 3D
SLAM solutions are highly computationally intensive as they use complex real-time particle filters, sub-mapping
strategies or hierarchical combination of metric topological representations, etc. (Wiki)
••Computational costs become prohibitive on embedded systems, especially smaller robotic modules. The data
becomes large and the calculations and corrections over time and space become much more important.
Specifically, SlaM increases exponentially with the number of landmarks found.
••The state uncertainty increase with time and space, and must be bounded by some form of machine learning to
predict and use accurate corrections in the algorithm
••Additional sensors, rapid movements, processing visual input adds additional computational burdens…](https://image.slidesharecdn.com/6312jwhitebear-170216010832/85/IoT-and-the-Autonomous-Vehicle-in-the-Clouds-Simultaneous-Localization-and-Mapping-SLAM-with-Kafka-and-Spark-Streaming-Spark-Summit-East-talk-by-Jay-White-Bear-8-320.jpg)



















![The Framework: Apache Kafka
28
Page 1 of 3untitled text 8
package com.kafka.producer;1
2
import org.apache.kafka.clients.producer.Producer;3
import org.apache.kafka.clients.producer.ProducerRecord;4
5
public class ProducerSim {6
7
public ProducerSim(ProducerSimConnect sim){8
try {9
10
//publish odometry data11
Thread threadOdom = new Thread("threadOdomSim") {12
13
public void run(){14
//instance must be created inside run class15
ProducerClass prod = new ProducerClass();16
Producer<String,String> prodr = prod.getProducer();17
18
//get odom file19
try {20
while(true){21
double[] odom = sim.getOdom();22
String odomLine =23
odom[1] +","+ odom[2] + ","+ odom[3];24
prodr.send(new ProducerRecord<String, String>25
("odom", String.valueOf(odom[0]),odomLine));26
prodr.flush();27
System.out.println("odom " + odomLine);28
//laser scanner intervals29
Thread.sleep(1000);30
}31
32
} catch (Exception e) {33
// TODO Auto-generated catch block34
e.printStackTrace();35
}36
37
}38
};39
40
//publish odometry data41
Thread threadLaser = new Thread("threadLaserSim") {42
public void run(){43
//instance must be new in each thread to maintain thread safety44
ProducerClass prod = new ProducerClass();45
Producer<String,String> prodr = prod.getProducer();46](https://image.slidesharecdn.com/6312jwhitebear-170216010832/85/IoT-and-the-Autonomous-Vehicle-in-the-Clouds-Simultaneous-Localization-and-Mapping-SLAM-with-Kafka-and-Spark-Streaming-Spark-Summit-East-talk-by-Jay-White-Bear-28-320.jpg)

![The Framework: Spark Streaming
30
Page 1 of 3untitled text 8
public class Stream {1
private Set<String> topicSet;2
private Map<String, String> kafkaParams;3
private ArrayList<double[]> odometry;4
private ArrayList<ArrayList<double[]>> laserData;5
private Data d;6
7
public Stream(JavaSparkContext sc){8
//storage9
odometry = new ArrayList<double[]>();10
laserData = new ArrayList<ArrayList<double[]>>();11
d = new Data();12
13
//set batch size14
//streaming context15
JavaStreamingContext jssc =16
new JavaStreamingContext(sc, Durations.seconds(1));17
18
//topic list19
topicSet = new HashSet<String>(Arrays.asList("odom", "laser"));20
//parameter list21
kafkaParams = new HashMap<String, String>();22
kafkaParams.put("bootstrap.servers", "localhost:9092");23
kafkaParams.put("group.id", "ekf");24
//set at movement of robot25
kafkaParams.put("auto.commit.interval.ms", "1");26
kafkaParams.put("consumer.timeout.ms", "10");27
28
29
//connect to tcp30
/*JavaReceiverInputDStream<String> lines =31
jssc.socketTextStream("localhost", 10555);32
33
lines.print();*/34
35
JavaPairInputDStream<String, String> msg =36
KafkaUtils.createDirectStream(37
jssc,38
String.class,39
String.class,40
StringDecoder.class,41
StringDecoder.class,42
kafkaParams,43
topicSet44
);45
46](https://image.slidesharecdn.com/6312jwhitebear-170216010832/85/IoT-and-the-Autonomous-Vehicle-in-the-Clouds-Simultaneous-Localization-and-Mapping-SLAM-with-Kafka-and-Spark-Streaming-Spark-Summit-East-talk-by-Jay-White-Bear-30-320.jpg)







































More Related Content
What's hot (20)
Viewers also liked (20)


















Similar to IoT and the Autonomous Vehicle in the Clouds: Simultaneous Localization and Mapping (SLAM) with Kafka and Spark Streaming: Spark Summit East talk by Jay White Bear (20)




















More from Spark Summit (20)




















Recently uploaded (20)




















IoT and the Autonomous Vehicle in the Clouds: Simultaneous Localization and Mapping (SLAM) with Kafka and Spark Streaming: Spark Summit East talk by Jay White Bear
- 1. IOT AND THE AUTONOMOUS VEHICLE IN THE CLOUDS: SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM) WITH KAFKA AND SPARK STREAMING J. White Bear IBM, Spark STC
- 2. About Me Education • University of Michigan- Computer Science • Databases, Machine Learning/Computational Biology, Cryptography • University of California San Francisco, University of California Berkeley- • Multi-objective Optimization/Computational Biology/Bioinformatics • McGill University • Machine Learning/ Multi-objective Optimization for Path Planning/ Cryptography Industry • IBM • Amazon • TeraGrid • Pfizer • Research at UC Berkeley, Purdue University, and every university I ever attended. J Fun Facts (?) I love research for its own sake. I like robots, helping to cure diseases, advocating for social change and reform, and breaking encryptions. Also, all activities involving the Ocean and I usually hate taking pictures. J
- 3. Introduction: Robotics Today FIRST Robotics World Championship NASA Glenn Research Center in Cleveland sponsored Tri-C's team. Tartan Racing’s Boss, the robotic SUV that won the 2007 DARPA Urban Challenge, South Korean Team, KAIST wins the DARPA Robot Challenge Amazon Drones
- 4. Introduction: Robotics Tomorrow Navigate stores, museums and other indoor locations, with directions overlaid onto your surroundings. Google Tango Nanorobots wade through blood to deliver drugs Space/underground/underwater rescue and exploration. Places humans can’t go. SLaM and ML on automated wheelchair
- 5. What is SLAM? Simultaneous Localization and Mapping (SLAM) ••Formal Definition ••Given a series of sensor observations over discrete time steps the SLAM problem is to compute an estimate of the agent's location and a map of the environment. All quantities are usually probabilistic, so the objective is to compute: ••Computational problem of constructing or updating a map of an unknown environment while simultaneously keeping track of an agent's location within it. ••SLAM algorithms use various implementations to attempt to find heuristics to make this problem tractable using machine learning and probabilistic models ••GPS cannot account for unknown barriers, precision navigation, moving objects, or any areas with satellite interference including weather phenomena.
- 6. What is SLAM? What are some of the key challenges in SLAM? ••Computer vision correctly and identifying images observed ••Moving objects Non-static environments, such as those containing other vehicles or pedestrians, continue to present research challenges. (collision detection) ••Data Association-refers to the problem of ascertaining which parts of one image correspond to which parts of another image, where differences are due to movement of the camera, the elapse of time, and/or movement of objects in the photos. ••Loop closure is the problem of recognizing a previously visited location and updating the states accordingly.
- 8. Why SLAM on IoT? SLAM in IoT ••"[SLAM] is one of the fundamental challenges of robotics . . . [but it] seems that almost all the current approaches can not perform consistent maps for large areas, mainly due to the increase of the computational cost and due to the uncertainties that become prohibitive when the scenario becomes larger."[12] Generally, complete 3D SLAM solutions are highly computationally intensive as they use complex real-time particle filters, sub-mapping strategies or hierarchical combination of metric topological representations, etc. (Wiki) ••Computational costs become prohibitive on embedded systems, especially smaller robotic modules. The data becomes large and the calculations and corrections over time and space become much more important. Specifically, SlaM increases exponentially with the number of landmarks found. ••The state uncertainty increase with time and space, and must be bounded by some form of machine learning to predict and use accurate corrections in the algorithm ••Additional sensors, rapid movements, processing visual input adds additional computational burdens…
- 9. Why SLAM on IoT? The Benefits ••Seamless integration and scaling allowing users to easily improve the heuristics of the algorithm without losing any of the performance expectations of an embedded system. ••Including smart cities, lawn mowing, dog walking, kitchen appliances, or even communication inside the human body creating a truly unique interaction between humans and robotics ••Large scale evaluation of performance metrics for all IoT systems (Big Data) ••Monitoring and control of sensors based on stored data (eg reducing sensor usage to conserve power)
- 10. Why SLAM on IoT? Current Approaches ••Robot Operating System (ROS) a collection of software frameworks for robot software development ••Providing operating system-like functionality on a heterogeneous computer cluster. ••Hardware abstraction, low-level device control, implementation of commonly used functionality, message-passing between processes, and package management. ••No true real-time analytics! Despite the importance of reactivity and low latency in robot control, ROS is not a Realtime OS ••Difficult to scale in IoT! Adding a heterogenous swarm, or integrating interactions requires significant planning. ••There is a need! Are there any plans to build Kalman filtering and system identification into this framework? https://github.com/sryza/spark-timeseries/issues/19 ••We need a framework that can do this! Enter Apache Kafka and Spark Streaming!
- 11. Why SLAM on IoT? Why build an ATV in isolation? “Google is trying to teach its cars to think more like humans. Google’s explanation of the incident ….” • Google cars have been involved in multiple accidents. Like many drivers, Googles blames the other non ATV drivers on the roads, humans. • http://gizmodo.com/a-google-self-driving-car-got-into-a-crash-with-a-bus-1762007421 • http://www.reuters.com/article/us-google-autos-accidents-idUSKBN0NX04I20150512 • “The autopilot sensors on the Model S failed to distinguish a white tractor-trailer crossing the highway against a bright sky.” • Tesla cars, also, recently ran into a bus. Unfortunatetly resulting in a death. • https://www.theguardian.com/technology/2016/jun/30/tesla-autopilot-death-self-driving- car-elon-musk
- 12. Why SLAM on IoT? Sensor Corrections Proximity Data Weather Data Cell phone Data Traffic Data This image cannot currently be displayed.
- 13. Why SLAM on IoT? Visual Data Odometry GPS Vehicle Sensors Kafka Messages Sensor Corrections Proximity Data Weather Data Cell phone Data Traffic Data
- 14. The Framework. 14 Business Processes & Functions Database Transactions POS/Retail Transactions Workforce/ workflow Manufacturing Production Line Optim. Energy Management Supply Chain Mgmt. Smart Cities/Homes Traffic Patterns/ Autonomous Vehicles Public Transit Energy/Water Mgmt Medical Devices Emergency Services Cellular Data More! Drone/Robotic Delivery Underwater/Space Research Nanobot Drug Delivery SensorData Kafka • BiDirectional Communication • High/Variable throughput • Adaptive Latency • Recovery • Redundancy • Metadata Analysis • Sensor Integration • ETL/Storage • Distributed/Hybrid Architecture Multiple Sensor Types • Wifi/ Lan/Wan • TCP/IP • Bluetooth • Cellular • Mems • Biological/ Chemical Sensors SparkStreaming/ML • High Performance Hybrid Cloud • Real-Time Analytics • Semi-Supervised Learning • Variety of Machine Learning Algorithms • Distributed Storage • Graphical Analysis • Data Science at your fingertips • More!
- 15. More sensors, more problems. 15
- 16. The Framework: The Kafka’s in the Details. 16 Topic Illustration 3. S1 Partition Management Bot5: 30ms Bot4: 25ms A. Increase in sensors/bots Bot1: 10ms Sensor Interval Detection (10ms & 40ms) Bot2: 10ms Bot3: 40ms Producer Producer Thread 10ms Producer Thread 40ms Sensor Interval Detection (10ms,25ms,30ms, 40ms) Producer Producer Thread 10ms Producer Thread 40ms Producer Thread 25ms & 30ms Topic C2 . Partition Doubling Optimization. All partitions are at maximum expected throughput, eg Bots arrive. We add 2 partitions (min needed partitions is 1) and divide the sensor over the two partitions X/ 2. B. New Producer Threads Spawned C. Bots 4,5 are added to the 40ms partition b/c it is the slowest. This happens for each new sensor interval until max throughput is reached. Partition 10ms (Bots 1,2) Partition 40ms (Bot 3) Bot1: 10ms Bot2: 10ms Bot3: 40ms Partition 10ms (Bots 1,2) Partition 40ms (Bots 3,4,5) Topic Partition 10ms (Bots 1,2) Partition 5ms (Bots X1) Partition 40ms (Bots 3,4,5) Partition 45ms (Bots X2) Partition Throughput Monitor
- 17. The Framework: The Kafka’s in the Details. 17 This is the first of many machine learning entry points in our cloud. Let’s assume a sensor is detected….. • How do we determine what kind of sensor is it? • What is the expected interval of communication of this sensor? • What is an interval that indicates failure? • Which vehicle is it connected to? • What other sensors should we be expecting to integrate with it? • What are the key intersections in this data, with our public data?
- 18. The Framework: The Kafka’s in the Details. 18 We need to model this as a machine learning problem and, in order to be efficient we need this to happen in real-time or near real-time. • Every sensor needs to be detected and distributed correctly in our messaging architecture. • The attributes we looked at early can be modeled as features and hashed accordingly. • The distribution needs to be correct and responsive. • We need automated retraining on these algorithms to ensure our models don’t diverge and remain within a certain boundary.
- 19. The Framework: Enter Real-Time Learning… 19 Kafka Producer RealTime Streaming Data Spark MlLib Streaming Real-Time Consumption Feature Extraction Feature Hashing Hashing Trick Matrix Factorization (omitted in POC) Out-of-Core Component RDD of All Data (not in cache) Timed/Event Based Training on Historical Dataset Can Trigger Model Updates *very large data can use subsampling methodology Background Out-of-Core Processing AllReduce Component All Reduce Analysis of mini batch data using dist. node averaging Can trigger Model Updates Initiates semi-supervised state, mini batches can be sequential or subsampling scheme Background In-Memory Processing Spanning Tree Protocol for AllReduce (simulated in POC) MiniBatches of RDD’s distributed to nodes Current Model Analysis Model Monitor Periodically tracks model performance poor performance initiates trigger to background/ cache processes for better model parameters Store current model parameters Current Model Parameters & Performance Single Batch Analysis (min >= 1 record) Cache of all model params and performance Comparative analysis of cached model, implement best perform local, if curr list of global performers < curr local, biased toward local Global Cache Stores/Best Performers Metrics from Out of Core Local Cache Stores/Best Performers Metrics from AllReduce
- 20. The Framework: Enter Real-Time Learning… 20 A Reliable Effective Terascale Linear Learning System, Agarwal et al.
- 21. The Framework: Implementation 21 The Approach ••Extended Kalman Filter (matrix based update/estimation) ••Nonlinear version of the Kalman filter which linearizes about an estimate of the current mean and covariance. de facto standard in the theory of nonlinear state estimation eg navigation systems and GPS. (wiki) ••TurtleBot II (standard robotics research bot) (named PQ)
- 22. The Framework: Implementation 22 The Approach
- 23. The Framework 23
- 24. The Framework 24 Our cluster: IBM SoftLayer cluster with 3 Nodes.
- 25. The Framework 25 IBM SoftLayer cluster with 3 Nodes. Node 1: Management Node Apache Kafka (Multithreaded Producers are each assigned a sensor) Simulator/Sensor Data Mapping Agent Node 2: Hadoop/Spark Spark Streaming Consumer/ Apache Kafka Producer to Simulator Spark Streaming Spark ML Analytics Node 3: Hadoop/Spark Spark Streaming Consumer/ Apache Kafka Producer to Simulator Spark Streaming Spark ML/ Analytics
- 26. The Framework 26 Apache Kafka Spark Streaming Spark ML/ Analytics and Computation Apache Kafka Simulated Turtlebot • Odometry, pose and orientation data for every movement. • Laser scan data every 30ms with over 1200 data points per read! • One robot and not even all the sensors! A high performing plug n play cloud for smart robotics, drones and intelligent systems that allows easily tuneable interactions for scientists and industry in any environment!
- 27. The Framework 27 A high performing plug n play cloud for smart robotics, drones and intelligent systems that allows easily tuneable interactions for scientists and industry in any environment! ••EKF is calculated primarily using matrix operations! ••Distributed raw sensor data using Apache Kafka. Number of sensors limited only by Kafka cluster! ••Improved performance using RDDs and Spark ML for computational intensive tasks! ••Fast/optimized learning and analytics! ••Real-time sensor messaging! ••Easy sensor integration and scaling! ••Retention of data over time for improved optimizations and accuracy!
- 28. The Framework: Apache Kafka 28 Page 1 of 3untitled text 8 package com.kafka.producer;1 2 import org.apache.kafka.clients.producer.Producer;3 import org.apache.kafka.clients.producer.ProducerRecord;4 5 public class ProducerSim {6 7 public ProducerSim(ProducerSimConnect sim){8 try {9 10 //publish odometry data11 Thread threadOdom = new Thread("threadOdomSim") {12 13 public void run(){14 //instance must be created inside run class15 ProducerClass prod = new ProducerClass();16 Producer<String,String> prodr = prod.getProducer();17 18 //get odom file19 try {20 while(true){21 double[] odom = sim.getOdom();22 String odomLine =23 odom[1] +","+ odom[2] + ","+ odom[3];24 prodr.send(new ProducerRecord<String, String>25 ("odom", String.valueOf(odom[0]),odomLine));26 prodr.flush();27 System.out.println("odom " + odomLine);28 //laser scanner intervals29 Thread.sleep(1000);30 }31 32 } catch (Exception e) {33 // TODO Auto-generated catch block34 e.printStackTrace();35 }36 37 }38 };39 40 //publish odometry data41 Thread threadLaser = new Thread("threadLaserSim") {42 public void run(){43 //instance must be new in each thread to maintain thread safety44 ProducerClass prod = new ProducerClass();45 Producer<String,String> prodr = prod.getProducer();46
- 29. The Framework: Spark Streaming 29 Spark Streaming Integration Apache Spark Streaming Apache Kafka Consumer Replaces Kafka Consumer Producer feeds directly to Spark Streaming Adheres to fault tolerance policies incl. WAL (write ahead logs to HDFS) Not necessarily thread safe (Java Api) KafkaUtils.createDirectStreamDirect w/o Receivers in new version, better access to low level Kafka metadata Auto-commit feature, partition replication, integration with Zookeeper. Finely tuned metadata access and storage by topic and partition Microbatch processing and better integration into Spark incl online learning Buffered batches, developing streaming analytics capabilities
- 30. The Framework: Spark Streaming 30 Page 1 of 3untitled text 8 public class Stream {1 private Set<String> topicSet;2 private Map<String, String> kafkaParams;3 private ArrayList<double[]> odometry;4 private ArrayList<ArrayList<double[]>> laserData;5 private Data d;6 7 public Stream(JavaSparkContext sc){8 //storage9 odometry = new ArrayList<double[]>();10 laserData = new ArrayList<ArrayList<double[]>>();11 d = new Data();12 13 //set batch size14 //streaming context15 JavaStreamingContext jssc =16 new JavaStreamingContext(sc, Durations.seconds(1));17 18 //topic list19 topicSet = new HashSet<String>(Arrays.asList("odom", "laser"));20 //parameter list21 kafkaParams = new HashMap<String, String>();22 kafkaParams.put("bootstrap.servers", "localhost:9092");23 kafkaParams.put("group.id", "ekf");24 //set at movement of robot25 kafkaParams.put("auto.commit.interval.ms", "1");26 kafkaParams.put("consumer.timeout.ms", "10");27 28 29 //connect to tcp30 /*JavaReceiverInputDStream<String> lines =31 jssc.socketTextStream("localhost", 10555);32 33 lines.print();*/34 35 JavaPairInputDStream<String, String> msg =36 KafkaUtils.createDirectStream(37 jssc,38 String.class,39 String.class,40 StringDecoder.class,41 StringDecoder.class,42 kafkaParams,43 topicSet44 );45 46
- 31. The Framework: Spark ML, RANSAC 31 Spark ML with RANSAC ••RANSAC •• One of many iterative method to estimate parameters of a mathematical model from a set of observed data which contains outliers. •• Default methodology for determining whether a series of landmark forms a wall or structure ••Ideal for consumption with high-throughput batches in Spark Streaming! ••Integrated as an online learning algorithm (This framework) as back-end iterative process in Spark Streaming/ Spark!
- 32. The Framework: RANSAC 32 Page 1 of 3untitled text 8 /* Tuning Parameters1 * N – Max number of times to attempt to find lines.2 S – Number of samples to compute initial line.3 D – Degrees from initial reading to sample from.4 X – Max distance a reading may be from line to get associated to line.5 C – Number of points that must lie on a line for it to be taken as a line.6 */7 8 //RANSAC Parameters9 final static int MAX_ITERATIONS = 10;10 final static int SAMPLES = 5;11 final static int DEGREE_RANGE = 10;12 final static int MAX_INLIER_DISTANCE = 3; //in cm/inches13 final static int MIN_LINE_SIZE = 10; //in number of points14 15 //ml vars16 SQLContext sqlContext;17 DataFrame training;18 19 //SLAM vars20 final static int LIFE = 40; //time to discard landmark ???21 final static double MAXRANGE = 1;22 final static double DEGREESPERSCAN = 0.5; //??23 24 //landmark25 ArrayList<Landmark2> landmarkDB; //track landmarks, change to RDD26 27 public Landmark2(){28 //landmarkDB = new ArrayList<Landmark2>();29 30 sqlContext = new org.apache.spark.sql.SQLContext(sc);31 32 // Load a text file and convert each line to a JavaBean.33 JavaRDD<String> readings =34 sc.textFile("sample_laser_range_cartesion_data.txt");35 36 // The schema is encoded in a string37 String schemaString = "x y";38 39 // Generate the schema based on the string of schema40 List<StructField> fields = new ArrayList<StructField>();41 for (String fieldName: schemaString.split(" ")) {42 fields.add(DataTypes.createStructField(fieldName, DataTypes.StringType, true));43 }44 fields.add(new StructField("features", new VectorUDT(), false, Metadata.empty()));45 fields.add(new StructField("label", DataTypes.DoubleType, false, Metadata.empty()));46
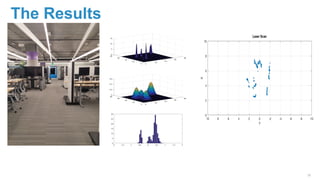
- 33. The Results 33 Key Challenges ••Network Latency ••Embedded vs Framework ••Matrix computations and updates to large matrices ••Jacobian (derivatives), Inversion, Transpositon, Multiplication, Addition/ Subtraction, Gaussian ••Covariance/Estimation computations ••Coordinating movement with computation ••Spark ML to correctly interpret visual landmark data, minimizing errors
- 34. The Results 34 Challenges ••~4KLOC (Java != verbose J) •• Java lambda documentation ••Kafka topics from Spark Streaming consumer ••Real-life latency depends on the type of connection and creates additional noise ••Matrix computation ••Defining heuristics
- 35. The Results 35 Measuring landmark acquisition and cpu time Embedded vs Framework at 500 iterations.
- 36. The Results 36 Measuring landmark acquisition and cpu time Embedded vs Framework at 500 iterations. Framework completed 500 iterations with expected exponential growth Embedded failed to complete at 500 iterations (up to ~300)
- 37. The Results 37 Measuring landmark acquisition and cpu time Embedded vs Framework for complete map. Both installations were run until the number of landmarks/maps were roughly equivalent and iterations marked. Iterations: ~100, Time ~2 min Iterations: ~100, Time ~30-40s
- 38. The Results 38
- 39. Next Steps 39 • Automated Message Identification and Partition Management • Expanded stochastic analysis beyond gradient descent • Kalman Filter and Extended Kalman Filter • Improving accuracy and precision with an end to end pipeline that allows customization/optimization • Path Planning algorithms to improve search and search times • Incorporate swarms/particles • A complete robotics library or even extension to handle robotics, computer vision or any of the ai/machine learning problems specifics to robotics publishable and opens the door to a whole new group of scientists. • Further scaling and optimization with robotic swarms and rapid/increased volume sensor data
- 40. Demo 40
- 41. 38 Contact Information: J. White Bear ([email protected]) IBM Spark Technology Center 425 Market St San Francisco, CA