





















![• Compute the binomial coefficient value of C[2,1]using the dynamic programming
approach.
• Init Row 0:
• Row 0 is computed by setting C[0, 0] = 1. This is required as a start-up of the
algorithm as by convention C(0, 0) = 1.
• Compute the first row:
C[1, 0] = 1; C[1, 1] = 1
• Using row 1, row 2 is computed as follows:
• Compute the second row:
C[2, 0] = 1; C[2, 1] = C[1, 0] + C[1, 1] = 1 + 1 = 2; C[2, 2] = 1
• Compute the third row.
C[3, 1] = C[2, 0] + C[2, 1] = 1 + 2 = 3
C[3, 2] = C[2, 1] + C[2, 2] = 2 + 1 = 3
• As the problem is about the computation of C[3, 2], it can be seen that the
binomial coefficient value of C[2, 1] is 2 and tallies with the conventional result
3!
1!1!
=6/2=3
24](https://image.slidesharecdn.com/l21l27unit5dynamicprogramming-250501115701-1accf2f3/85/L21_L27_Unit_5_Dynamic_Programming-Computer-Science-24-320.jpg)

![Forward computation procedure
• Step 1: Read directed graph G = <V, E> with k stages.
• Step 2: Let n be the number of nodes and dist[1… k] be the distance array.
• Step 3: Set the initial cost to zero.
• Step 4: Loop index i from (n − 1) to 1.
• 4a: Find a vertex v from the next stage such that the edge connecting the current
stage and the next stage is minimum (j, v) + cost(v) is minimum.
• 4b: Update cost and store v in another array dist[].
• Step 5: Return cost.
• Step 6: End.
• The shortest path can finally be obtained or reconstructed by tracking the
distance array
26](https://image.slidesharecdn.com/l21l27unit5dynamicprogramming-250501115701-1accf2f3/85/L21_L27_Unit_5_Dynamic_Programming-Computer-Science-26-320.jpg)





![Floyd-Warshall all-pairs shortest algorithm
• The Floyd–Warshall algorithm finds the shortest simple path from node s to node
t. The input for the algorithm is an adjacency matrix of the graph G. The cost(i, j)
is computed as follows
• Step 1: Read weighted graph G = <V, E>.
• Step 2: Initialize D[i, j] as follows:
0
𝐶𝑜𝑠𝑡 𝑖, 𝑗 = ∞
𝑤𝑖𝑗
𝑖𝑓 𝑖 = 𝑗
𝑖𝑓 𝑒𝑑𝑔𝑒 (𝑖, 𝑗) ∉ 𝐸(𝐺)
𝑖𝑓 𝑒𝑑𝑔𝑒 (𝑖, 𝑗) ∈ 𝐸(𝐺)
• Step 3: For intermediate nodes k, 1 ≤ 𝑘 ≤ 𝑛, recursively compute 𝐷𝑖𝑗 =
𝑚𝑖𝑛1≤𝑘≤𝑛 𝐷𝑖𝑗, 𝐷𝑖𝑘 + 𝐷𝑘𝑗
• Step 4: Return matrix D.
• Step 5: End.
34](https://image.slidesharecdn.com/l21l27unit5dynamicprogramming-250501115701-1accf2f3/85/L21_L27_Unit_5_Dynamic_Programming-Computer-Science-32-320.jpg)





![Travelling salesman problem
• Step 1: Read weighted graph G = <V, E>.
• Step 2: Initialize d[i, j] as follows:
0
𝑑 𝑖, 𝑗 = ∞
𝑤𝑖𝑗
𝑖𝑓 𝑖 = 𝑗
𝑖𝑓 𝑒𝑑𝑔𝑒 (𝑖, 𝑗) ∉ 𝐸(𝐺)
𝑖𝑓 𝑒𝑑𝑔𝑒 (𝑖, 𝑗) ∈ 𝐸(𝐺)
• Step 3: Compute a function g(i, S), a function that gives the length of the shortest path starting from
vertex i, traversing through all the vertices in set S, and terminating at vertex i as follows:
3a: 𝑐𝑜𝑠𝑡 𝑖, 𝜙 = 𝑑 𝑖, 1 , 1 ≤ 𝑖 ≤ 𝑛
3b: For |S| = 2 to n − 1, where, 𝑖 ≠ 1, 1 ∉ 𝑆, 𝑖 ∉ 𝑆 compute recursively
𝑐𝑜𝑠𝑡(𝑆. 𝑖) 𝑚𝑖𝑛𝑗∈𝑆{𝑐𝑜𝑠𝑡[𝑖, 𝑗], 𝑆 − {𝑗}} and store the value.
• Step 4: Compute the minimum cost of the travelling salesperson tour as follows: Compute
cost 1, v − {1} = 𝑚𝑖𝑛2 ≤ 𝑖 ≤ 𝑘{𝑑[1, 𝑘] + 𝑐𝑜𝑠𝑡(𝑘, 𝑣 − {1, 𝑘}} 𝑢𝑠𝑖𝑛𝑔 𝑔(𝑖, 𝑆) computed in Step 3.
• Step 5: Return the value of Step 4.
• Step 6: End.
46](https://image.slidesharecdn.com/l21l27unit5dynamicprogramming-250501115701-1accf2f3/85/L21_L27_Unit_5_Dynamic_Programming-Computer-Science-38-320.jpg)
![Travelling salesman problem
• Solve the TSP for the graph shown in Fig. 13.17 using dynamic programming.
• cost(2, ∅) = d[2, 1] = 2; cost(3, ∅) = d[3, 1] = 4; cost(4, ∅) = d[4, 1] = 6
• This indicates the distance from vertices 2, 3, and 4 to vertex 1. When |S| = 1, cost(i, j) function
can be solved using the recursive function as follows:
cost(2,{3}) = d[2, 3] + cost(3, ∅)=5+4=9
cost(2,{4}) = d[2, 4] + cost(4, ∅) = 7 + 6 = 13
cost(3,{2}) = d[3, 2] + cost(2, ∅) =3+2=5
cost(3,{4}) = d[3, 4] + cost(4, ∅) = 8 + 6 = 14
cost(4,{2}) = d[4, 2] + cost(2, ∅) =5+2=7
cost(4,{3}) = d[4, 3] + cost(3, ∅) = 9 + 4 = 13
47](https://image.slidesharecdn.com/l21l27unit5dynamicprogramming-250501115701-1accf2f3/85/L21_L27_Unit_5_Dynamic_Programming-Computer-Science-39-320.jpg)
![• Now, cost(S, i) is computed with |S| = 2, i ≠ 1, 1 ∉S, i ∉n, that is, set S involves two intermediate nodes.
cost(2,{3,4}) = min{d[2, 3] + cost(3, {4}), d[2, 4] + cost(4, {3})} = min{5 + 14 , 7 + 13} = min{19, 20} = 19
cost(3,{2,4}) = min{d[3, 2] + cost(2, {4}), dist[3, 4]+cost(4, {2})} = min{3 + 13, 8 + 7} = min{16, 15} = 15
cost(4,{2,3}) = min{d[4, 2] + cost(2, {3}), d[4, 3] + cost(3, {2})} = min{5 + 9, 9 + 5} = min{14, 14} = 14
• Finally, the total cost of the tour is calculated, which involves three intermediate nodes, that is, |S| = 3. As |S|
= n − 1, where n is the number of nodes, the process terminates.
• Finally, using the equation, cost(1, v − {1}) = 〖min〗_(2≤i≤k) {dist[1, k] + cost(k, v − {1, k}}, cost of the tour
[cost(1, {2, 3, 4})] is computed as follows:
cost(1,{2, 3, 4}) = min{d[1, 2] + cost(2,{3, 4}), d[1, 3] + cost(3, {2, 4}),d[1, 4] + cost(4, {2, 3})} = min{5 + 19, 3 +
15, 10 + 14} = min {24,18, 24} = 18
Hence, the minimum cost tour is 18. Therefore, P(1, {2, 3, 4}) = 3, as the minimum cost obtained is only 18. Thus,
the tour goes from 1→3. It can be seen that C(3, {2, 4}) is minimum and the successor of node 3 is 4. Hence, the
path is 1 → 3 → 4, and the final TSP tour is given as 1 → 3 → 4 → 2 → 1. 48](https://image.slidesharecdn.com/l21l27unit5dynamicprogramming-250501115701-1accf2f3/85/L21_L27_Unit_5_Dynamic_Programming-Computer-Science-40-320.jpg)
![Knapsack Problem
• Step 1: Let n be the number of objects.
• Step 2: Let W be the capacity of the knapsack.
• Step 3: Construct the matrix V [i, j] that stores items and their weights. Index i
tracts the items added to the knapsack (i.e., 1 to n), and index j tracks the weights
(i.e., 0 to W)
• Step 4: Initialize V[0, j] = 0 if j≥0. This implies no profit if no item is in the
knapsack.
• Step 5: Recursively compute the following steps:
5a: Leave the object i if 𝑤𝑗 > 𝑗 or 𝑗 − 𝑤𝑖 < 0. This leaves the knapsack
with the items {1, 2, … , 𝑖 − 1] with profit 𝑉 𝑖 − 1, 𝑗 .
5b: Add the item i if 𝑤𝑗 ≤ 𝑗 or 𝑗 − 𝑤𝑖 ≥ 0. In this case, the addition of the
items results in a profit max{𝑉 [𝑖 − 1,𝑗], 𝑉𝑖 + 𝑉 [𝑖 − 1,𝑗 − 𝑤𝑖])}. Here 𝑉𝑖 is the
profit of the current item.
• Step 6: Return the maximum profit of adding feasible items to the knapsack, V
[1… n].
• Step 7: End. 55](https://image.slidesharecdn.com/l21l27unit5dynamicprogramming-250501115701-1accf2f3/85/L21_L27_Unit_5_Dynamic_Programming-Computer-Science-41-320.jpg)


![• Computation of first row:
V[1, 1] = max{V[1 − 1, 1], 1 + V[0, 0]} = max{V[0, 1], 1 + 0} = 1
V[1, 2] = max{V[0, 1], 1 + V[0, 1]} = 1
V[1, 3] = max{V[0, 1], 1 + V[0, 2]} = 1
• Computation of second row:
V[2, 1] = 1
V[2, 2] = max{V[1, 1], 6 + V[1, 0]} = 6
V[2, 3] = max{V[1, 1], 6 + V[1, 1]} = 7
• Computation of third row
V[3, 1] = V[2, 1] = 1
V[3, 2] = V[2, 2] = 6
V[3, 3] = V[2, 3] = 7
58](https://image.slidesharecdn.com/l21l27unit5dynamicprogramming-250501115701-1accf2f3/85/L21_L27_Unit_5_Dynamic_Programming-Computer-Science-44-320.jpg)






























Ad
More Related Content
Similar to L21_L27_Unit_5_Dynamic_Programming Computer Science (20)
Recently uploaded (20)


















Ad
L21_L27_Unit_5_Dynamic_Programming Computer Science
- 2. • Useful for solving multistage optimization problems. • An optimization problem deals with the maximization or minimization of the objective function as per problem requirements. • In multistage optimization problems, decisions are made at successive stages to obtain a global solution for the given problem. • Dynamic programming divides a problem into subproblems and establishes a recursive relationship between the original problem and its subproblems. BASICS OF DYNAMIC PROGRAMMING 2
- 3. BASICS OF DYNAMIC PROGRAMMING-cont’d • A subproblem representing a small part of the original problem is solved to obtain the optimal solution. • Then the scope of this subproblem is enlarged to find the optimal solution for a new subproblem. • This enlargement process is repeated until the subproblem’s scope encompasses the original problem. • After that, a solution for the whole problem is obtained by combining the optimal solutions of its subproblems. 3
- 4. • The difference between dynamic programming and the top-down or divide-and-conquer approach is that the subproblems overlap in the dynamic programming approach. In contrast, in the divide-and-conquer approach, the subproblems are independent. The differences between the dynamic programming and divide-and-conquer approaches. Dynamic programming vs divide-and-conquer approaches 4
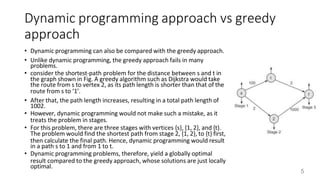
- 5. Dynamic programming approach vs greedy approach • Dynamic programming can also be compared with the greedy approach. • Unlike dynamic programming, the greedy approach fails in many problems. • consider the shortest-path problem for the distance between s and t in the graph shown in Fig. A greedy algorithm such as Dijkstra would take the route from s to vertex 2, as its path length is shorter than that of the route from s to ‘1’. • After that, the path length increases, resulting in a total path length of 1002. • However, dynamic programming would not make such a mistake, as it treats the problem in stages. • For this problem, there are three stages with vertices {s}, {1, 2}, and {t}. The problem would find the shortest path from stage 2, {1, 2}, to {t} first, then calculate the final path. Hence, dynamic programming would result in a path s to 1 and from 1 to t. • Dynamic programming problems, therefore, yield a globally optimal result compared to the greedy approach, whose solutions are just locally optimal. 5
- 6. Dynamic programming approach vs greedy approach Advantages and Disadvantages of dynamic programming 6
- 7. Components of Dynamic Programming • The guiding principle of dynamic programming is the ‘principle of optimality’. In simple words, a given problem is split into subproblems. • Then, this principle helps us solve each subproblem optimally, ultimately leading to the optimal solution of the given problem. It states that an optimal sequence of decisions in a multistage decision problem is feasible if its sub-sequences are optimal. • In other words, the Bellman principle of optimality states that “an optimal policy (a sequence of decisions) has the property that whatever the initial state and decision are, the remaining decisions must constitute an optimal policy concerning the state resulting from the first decision”. • The solution to a problem can be achieved by breaking the problem into subproblems. The subproblems can then be solved optimally. If so, the original problem can be solved optimally by combining the optimal solutions of its subproblems. 7
- 8. Components of Dynamic Programming 8
- 9. overlapping subproblems • Dynamic programs possess two essential properties— • overlapping subproblems • optimal substructures. • Overlapping subproblems One of the main characteristics of dynamic programming is to split the problem into subproblems, similar to the divide-and-conquer approach. The sub-problems are further divided into smaller problems. However, unlike divide and conquer, here, many subproblems overlap and cannot be treated distinctly. • This feature is the primary characteristic of dynamic programming. There are two ways of handling this overlapping problem: • The memoization technique • The tabulation method. 9
- 10. overlapping subproblems • The Fibonacci sequence is given as (0, 1, 1, 2, 3, 5, 8, 13, …). The following recurrence equations can generate this sequence: 𝐹0 = 0 𝐹1 = 1 𝐹𝑛 = 𝐹𝑛−1 + 𝐹𝑛−2 𝑓𝑜𝑟 𝑛 ≥ 2 • A straightforward pseudo-code for implementing this recursive equation is as follows: • Consider a Fibonacci recurrence tree for n = 5, as shown in Fig. 13.2. • It can be observed from Fig. 13.3 that there are multiple overlapping subproblems. • As n becomes large, subproblems increase exponentially, and repeated calculation makes the algorithm ineffective. In general, to compute Fibonacci(n), one requires two terms: • Fibonacci (n-1) and Fibonacci (n-2) • Even for computing Fibonacci(50), one must have all the previous 49 terms, which is tedious. • This exponential complexity of Fibonacci computation is because many of the subproblems are repetitive, and hence there are chances of multiple recomputations. • The complexity analysis of this algorithm yields 𝑇 𝑛 = Ω 𝜙𝑛 . Here f is called the golden ratio, whose value is approximately 1.62. 10
- 11. Optimal substructure • The optimal solution of a problem can be expressed in terms of optimal solutions to its subproblems. • In dynamic programming, a problem can be divided into subproblems. Then, the subproblem can be solved suboptimally. If so, the optimal solutions of the subproblems can lead to the optimal solution of the original problem. • If the solution to the original problem has stages, then the decision taken at the current stage depends on the decision taken in the previous stages. • Therefore, there is no need to consider all possible decisions and their consequences as the optimal solution of the given problem is built on the optimal solution of its subproblems 11
- 12. Optimal substructure • Consider the graph shown in Fig. 13.3. Consider the best route to visit the city v from city u. • This problem can be broken into a problem of finding a route from u to x and from x to v. If <u, x> is the optimal route from u to x, and the best route from x to v is <x, v>, then the best route from u to v can be built on the optimal solutions of its two subproblems. In other words, the route constructed on the suboptimal optimal routes must also be optimal. • The general template for solving dynamic programming looks like this: • Step 1: The given problem is divided into many subproblems, as in the case of the divide-and-conquer strategy. In divide and conquer, the subproblems are independent of each other; however, in the dynamic programming case, the subproblems are not independent of each other, but they are interrelated and hence are overlapping subproblems. 12
- 13. Optimal substructure • Step 2: A table is created to avoid the recomputation of multiple overlapping subproblems repeatedly; a table is created. Whenever a subproblem is solved, its solution is stored in the table, so that its solutions can be reused. • Step 3.The solutions of the subproblems are combined in a bottom-up manner to obtain the final solution of the given problem • The essential steps are thus: 1. It is breaking the problems into its subproblems. 2. Creating a lookup table that contains the solutions of the subproblems. 3. Reuse the solutions of the subproblems stored in the table to construct solutions to the given problem. 13
- 14. Optimal substructure Dynamic programming uses the lookup table in both a top-down manner and a bottom-up manner. The top-down approach is called the memorization technique, and the bottom-up manner is called the tabulation method. 1. Memoization technique: This method looks into a table to check whether the table has any entries. The lookup table Contains entries such as ‘NIL’ or ‘undefined’. If no value is present, then it is computed. Otherwise, the pre- computed value is reused. In other words, computation follows a top-down method similar to the recursion approach. 2. Tabulation method: Here, the problem is solved from scratch. The smallest subproblem is solved, and its value is stored in the table. Its value is used later for solving larger problems. In other words, computation follows a bottom-up method. 14
- 15. FIBONACCI PROBLEM • The Fibonacci sequence is given as (0, 1, 1, 2, 3, 5, 8, 13, …). The following recurrence equations can generate this sequence: 𝐹0 = 0 𝐹1 = 1 𝐹𝑛 = 𝐹𝑛−1 + 𝐹𝑛−2 𝑓𝑜𝑟 𝑛 ≥ 2 • The best way to solve this problem is to use the dynamic programming approach, in which the results of the intermediate problems are stored. Consequently, results of the previously computed subproblems can be used instead of recomputing the subproblems repeatedly. Thus, a subproblem is computed only once, and the exponential algorithm is reduced to a polynomial algorithm. • A table is created to store the intermediate results, a table is created, and its values are reused. 15
- 16. Bottom-up approach • An iterative loop can be used to modify this Fibonacci number computation effectively, and the resulting dynamic programming algorithm can be used to compute the nth Fibonacci number. • Step 1: Read a positive integer n. • Step 2: Initialize first to 0. • Step 3: Initialize second to 1. • Step 4: Repeat n − 1 times. • 4a: Compute current as first + second. • 4b: Update first = second. • 4c: Update second = current. • Step 5: Return(current). • Step 6: End. 16
- 17. Fibonacci Algorithm using dynamic programming 17
- 18. Top-down approach and Memoization • Dynamic programming can use the top-down approach for populating and manipulating the table. • Step 1: Read a positive integer n • Step 2: Create a table A with n entries • Step 3: Initialize table A with the status ‘undefined.’ • Step 4: If the table entry is ‘undefined.’ • 4a: Compute recursively mem_Fib(n) = mem_Fib(n − 1) + mem_Fib(n − 2) else return table value • Step 5: Return(mem_Fibonacci(A, n)) 18
- 20. COMPUTING BINOMIAL COEFFICIENTS • Given a positive integer 𝑛 and any real number 𝑎 and 𝑏, the expansion of (𝑎 + 𝑏)𝑛 is done as follows: • Where, C=Combination, 𝐶 𝑛, 𝑘 𝑜𝑟 • Binomial coefficients represented as 𝐶(𝑛, 𝑘) or 𝑛𝐶𝑘, can be used to represent the coefficients of (𝑎 + 𝑏)𝑛 𝑛 𝑘 20
- 21. COMPUTING BINOMIAL COEFFICIENTS • The binomial coefficient can be computed using the following formula: • 𝐶 𝑛, 𝑘 = 𝑛! 𝑘! 𝑛−𝑘 ! for non-negative integers n and k. And, by convention, 𝐶(0,0) = 1. 21
- 22. Computing binomial coefficients Algorithm The complexity analysis of this algorithm can be observed as O(n, k). 22
- 24. • Compute the binomial coefficient value of C[2,1]using the dynamic programming approach. • Init Row 0: • Row 0 is computed by setting C[0, 0] = 1. This is required as a start-up of the algorithm as by convention C(0, 0) = 1. • Compute the first row: C[1, 0] = 1; C[1, 1] = 1 • Using row 1, row 2 is computed as follows: • Compute the second row: C[2, 0] = 1; C[2, 1] = C[1, 0] + C[1, 1] = 1 + 1 = 2; C[2, 2] = 1 • Compute the third row. C[3, 1] = C[2, 0] + C[2, 1] = 1 + 2 = 3 C[3, 2] = C[2, 1] + C[2, 2] = 2 + 1 = 3 • As the problem is about the computation of C[3, 2], it can be seen that the binomial coefficient value of C[2, 1] is 2 and tallies with the conventional result 3! 1!1! =6/2=3 24
- 25. MULTISTAGE GRAPH PROBLEM (stagecoach problem) • The multistage problem is a problem of finding the shortest path from the source to the destination. Every edge connects two nodes from two partitions. The initial node is called a source (No indegree), and the last node is called a sink (as there is no outdegree). 25
- 26. Forward computation procedure • Step 1: Read directed graph G = <V, E> with k stages. • Step 2: Let n be the number of nodes and dist[1… k] be the distance array. • Step 3: Set the initial cost to zero. • Step 4: Loop index i from (n − 1) to 1. • 4a: Find a vertex v from the next stage such that the edge connecting the current stage and the next stage is minimum (j, v) + cost(v) is minimum. • 4b: Update cost and store v in another array dist[]. • Step 5: Return cost. • Step 6: End. • The shortest path can finally be obtained or reconstructed by tracking the distance array 26
- 29. • Consider the graph shown in Fig. 13.7. Find the shortest path from the source to the sink using the forward approach of dynamic programming. 29
- 30. Backward computation procedure • Consider the graph shown in Fig. 13.8. Find the shortest path from the source to the sink using the backward approach of dynamic programming. • Unlike the forward approach, the computation starts from stage 1 to stage 5. The cost of the edges that connect Stage 2 to Stage 1 is calculated. 30
- 31. 31
- 32. Floyd-Warshall all-pairs shortest algorithm • The Floyd–Warshall algorithm finds the shortest simple path from node s to node t. The input for the algorithm is an adjacency matrix of the graph G. The cost(i, j) is computed as follows • Step 1: Read weighted graph G = <V, E>. • Step 2: Initialize D[i, j] as follows: 0 𝐶𝑜𝑠𝑡 𝑖, 𝑗 = ∞ 𝑤𝑖𝑗 𝑖𝑓 𝑖 = 𝑗 𝑖𝑓 𝑒𝑑𝑔𝑒 (𝑖, 𝑗) ∉ 𝐸(𝐺) 𝑖𝑓 𝑒𝑑𝑔𝑒 (𝑖, 𝑗) ∈ 𝐸(𝐺) • Step 3: For intermediate nodes k, 1 ≤ 𝑘 ≤ 𝑛, recursively compute 𝐷𝑖𝑗 = 𝑚𝑖𝑛1≤𝑘≤𝑛 𝐷𝑖𝑗, 𝐷𝑖𝑘 + 𝐷𝑘𝑗 • Step 4: Return matrix D. • Step 5: End. 34
- 33. Floyd-Warshall all-pairs shortest algorithm 35
- 34. Floyd-Warshall all-pairs shortest algorithm 36
- 35. Floyd-Warshall all-pairs shortest algorithm 37
- 36. • Apply the Warshall algorithm and find the transitive closure for the graph shown in Fig. 13.10. 38
- 37. • Consider the graph shown in Fig. 13.11 and find the shortest path using the Floyd–Warshall algorithm. 39
- 38. Travelling salesman problem • Step 1: Read weighted graph G = <V, E>. • Step 2: Initialize d[i, j] as follows: 0 𝑑 𝑖, 𝑗 = ∞ 𝑤𝑖𝑗 𝑖𝑓 𝑖 = 𝑗 𝑖𝑓 𝑒𝑑𝑔𝑒 (𝑖, 𝑗) ∉ 𝐸(𝐺) 𝑖𝑓 𝑒𝑑𝑔𝑒 (𝑖, 𝑗) ∈ 𝐸(𝐺) • Step 3: Compute a function g(i, S), a function that gives the length of the shortest path starting from vertex i, traversing through all the vertices in set S, and terminating at vertex i as follows: 3a: 𝑐𝑜𝑠𝑡 𝑖, 𝜙 = 𝑑 𝑖, 1 , 1 ≤ 𝑖 ≤ 𝑛 3b: For |S| = 2 to n − 1, where, 𝑖 ≠ 1, 1 ∉ 𝑆, 𝑖 ∉ 𝑆 compute recursively 𝑐𝑜𝑠𝑡(𝑆. 𝑖) 𝑚𝑖𝑛𝑗∈𝑆{𝑐𝑜𝑠𝑡[𝑖, 𝑗], 𝑆 − {𝑗}} and store the value. • Step 4: Compute the minimum cost of the travelling salesperson tour as follows: Compute cost 1, v − {1} = 𝑚𝑖𝑛2 ≤ 𝑖 ≤ 𝑘{𝑑[1, 𝑘] + 𝑐𝑜𝑠𝑡(𝑘, 𝑣 − {1, 𝑘}} 𝑢𝑠𝑖𝑛𝑔 𝑔(𝑖, 𝑆) computed in Step 3. • Step 5: Return the value of Step 4. • Step 6: End. 46
- 39. Travelling salesman problem • Solve the TSP for the graph shown in Fig. 13.17 using dynamic programming. • cost(2, ∅) = d[2, 1] = 2; cost(3, ∅) = d[3, 1] = 4; cost(4, ∅) = d[4, 1] = 6 • This indicates the distance from vertices 2, 3, and 4 to vertex 1. When |S| = 1, cost(i, j) function can be solved using the recursive function as follows: cost(2,{3}) = d[2, 3] + cost(3, ∅)=5+4=9 cost(2,{4}) = d[2, 4] + cost(4, ∅) = 7 + 6 = 13 cost(3,{2}) = d[3, 2] + cost(2, ∅) =3+2=5 cost(3,{4}) = d[3, 4] + cost(4, ∅) = 8 + 6 = 14 cost(4,{2}) = d[4, 2] + cost(2, ∅) =5+2=7 cost(4,{3}) = d[4, 3] + cost(3, ∅) = 9 + 4 = 13 47
- 40. • Now, cost(S, i) is computed with |S| = 2, i ≠ 1, 1 ∉S, i ∉n, that is, set S involves two intermediate nodes. cost(2,{3,4}) = min{d[2, 3] + cost(3, {4}), d[2, 4] + cost(4, {3})} = min{5 + 14 , 7 + 13} = min{19, 20} = 19 cost(3,{2,4}) = min{d[3, 2] + cost(2, {4}), dist[3, 4]+cost(4, {2})} = min{3 + 13, 8 + 7} = min{16, 15} = 15 cost(4,{2,3}) = min{d[4, 2] + cost(2, {3}), d[4, 3] + cost(3, {2})} = min{5 + 9, 9 + 5} = min{14, 14} = 14 • Finally, the total cost of the tour is calculated, which involves three intermediate nodes, that is, |S| = 3. As |S| = n − 1, where n is the number of nodes, the process terminates. • Finally, using the equation, cost(1, v − {1}) = 〖min〗_(2≤i≤k) {dist[1, k] + cost(k, v − {1, k}}, cost of the tour [cost(1, {2, 3, 4})] is computed as follows: cost(1,{2, 3, 4}) = min{d[1, 2] + cost(2,{3, 4}), d[1, 3] + cost(3, {2, 4}),d[1, 4] + cost(4, {2, 3})} = min{5 + 19, 3 + 15, 10 + 14} = min {24,18, 24} = 18 Hence, the minimum cost tour is 18. Therefore, P(1, {2, 3, 4}) = 3, as the minimum cost obtained is only 18. Thus, the tour goes from 1→3. It can be seen that C(3, {2, 4}) is minimum and the successor of node 3 is 4. Hence, the path is 1 → 3 → 4, and the final TSP tour is given as 1 → 3 → 4 → 2 → 1. 48
- 41. Knapsack Problem • Step 1: Let n be the number of objects. • Step 2: Let W be the capacity of the knapsack. • Step 3: Construct the matrix V [i, j] that stores items and their weights. Index i tracts the items added to the knapsack (i.e., 1 to n), and index j tracks the weights (i.e., 0 to W) • Step 4: Initialize V[0, j] = 0 if j≥0. This implies no profit if no item is in the knapsack. • Step 5: Recursively compute the following steps: 5a: Leave the object i if 𝑤𝑗 > 𝑗 or 𝑗 − 𝑤𝑖 < 0. This leaves the knapsack with the items {1, 2, … , 𝑖 − 1] with profit 𝑉 𝑖 − 1, 𝑗 . 5b: Add the item i if 𝑤𝑗 ≤ 𝑗 or 𝑗 − 𝑤𝑖 ≥ 0. In this case, the addition of the items results in a profit max{𝑉 [𝑖 − 1,𝑗], 𝑉𝑖 + 𝑉 [𝑖 − 1,𝑗 − 𝑤𝑖])}. Here 𝑉𝑖 is the profit of the current item. • Step 6: Return the maximum profit of adding feasible items to the knapsack, V [1… n]. • Step 7: End. 55
- 43. • Apply the dynamic programming algorithm to the instance of the knapsack problem shown in Table 13.28. Assume that the knapsack capacity is w = 3. Knapsack Problem 57
- 44. • Computation of first row: V[1, 1] = max{V[1 − 1, 1], 1 + V[0, 0]} = max{V[0, 1], 1 + 0} = 1 V[1, 2] = max{V[0, 1], 1 + V[0, 1]} = 1 V[1, 3] = max{V[0, 1], 1 + V[0, 2]} = 1 • Computation of second row: V[2, 1] = 1 V[2, 2] = max{V[1, 1], 6 + V[1, 0]} = 6 V[2, 3] = max{V[1, 1], 6 + V[1, 1]} = 7 • Computation of third row V[3, 1] = V[2, 1] = 1 V[3, 2] = V[2, 2] = 6 V[3, 3] = V[2, 3] = 7 58