



































































Lec 4 (program and network properties)
- 1. Program and Network Properties • Conditions of parallelism • Program partitioning and scheduling • Program flow mechanisms • System interconnect architectures
- 2. 2 Conditions of Parallelism The exploitation of parallelism in computing requires un derstanding the basic theory associated with it. Progress is needed in several areas: computation models for parallel computing interprocessor communication in parallel architectures integration of parallel systems into general environments
- 3. 3 Data dependences The ordering relationship between statements is indicated by the data de pendence. •Flow dependence •Anti dependence •Output dependence •I/O dependence •Unknown dependence
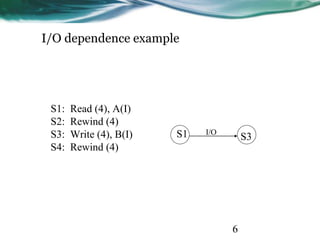
- 4. 4 Data Dependence - 1 • Flow dependence: S1 precedes S2, and at least one output of S1 is input to S2. • Antidependence: S1 precedes S2, and the output of S2 overlaps th e input to S1. • Output dependence: S1 and S2 write to the same output variable. • I/O dependence: two I/O statements (read/write) reference the sa me variable, and/or the same file.
- 5. 5 Data dependence example S1: Load R1, A S2: Add R2, R1 S3: Move R1, R3 S4: Store B, R1 S1 S2 S4 S3
- 6. 6 I/O dependence example S1: Read (4), A(I) S2: Rewind (4) S3: Write (4), B(I) S4: Rewind (4) S1 S3I/O
- 7. 7 Control dependence • The order of execution of statements cannot be determined before ru n time o Conditional branches o Successive operations of a looping procedure
- 8. 8 Control dependence examples Do 20 I = 1, N A(I) = C(I) IF(A(I) .LT. 0) A(I)=1 20 Continue Do 10 I = 1, N IF(A(I-1) .EQ. 0) A(I)=0 10 Continue
- 9. 9 Resource dependence • Concerned with the conflicts in using shared resources o Integer units o Floating-point units o Registers o Memory areas o ALU o Workplace storage
- 10. 10 Bernstein’s conditions • Set of conditions for two processes to execute in parallel I1 O2 = Ø I2 O1 = Ø O1 O2 = Ø
- 11. 11 Bernstein’s Conditions - 2 • In terms of data dependencies, Bernstein’s conditions imply th at two processes can execute in parallel if they are flow-indepe ndent, anti-independent, and output-independent. • The parallelism relation || is commutative (Pi || Pj implies Pj || Pi ), but not transitive (Pi || Pj and Pj || Pk does not imply Pi || Pk ) . Therefore, || is not an equivalence relation. • Intersection of the input sets is allowed.
- 12. 12 Utilizing Bernstein’s conditions P1 : C = D x E P2 : M = G + C P3 : A = B + C P4 : C = L + M P5 : F = G / E P1 P3 P2 P4 P5
- 14. 14 Hardware parallelism • A function of cost and performance tradeoffs • Displays the resource utilization patterns of simultan eously executable operations • Denote the number of instruction issues per machin e cycle: k-issue processor • A multiprocessor system with n k-issue processors s hould be able to handle a maximum number of nk th reads of instructions simultaneously
- 15. 15 Software parallelism • Defined by the control and data dependence of p rograms • A function of algorithm, programming style, and compiler organization • The program flow graph displays the patterns of simultaneously executable operations
- 16. 16 Mismatch between software and hardware parallelism - 1 L1 L2 L3 L4 X1 X2 + - A B Fig. : Software parallelism Cycle 1 Cycle 2 Cycle 3 Maximum software parallelis m (L=load, X/+/- = arithmeti c) 8 instructions(4 loads and 4 arithmetic operations ) Parallelism varies from 4 to 2 in three cycles
- 17. 17 Mismatch between software and hardware parall elism - 2 L1 L2 L4 L3X1 X2 + - A B Cycle 1 Cycle 2 Cycle 3 Cycle 4 Cycle 5 Cycle 6 Cycle 7 Same problem, but consid ering the parallelism on a two-issue superscalar pro cessor.
- 18. 18 Mismatch between software and hardware parall elism - 3 L1 L2 S1 X1 + L5 L3 L4 S2 X2 - L6 BA Cycle 1 Cycle 2 Cycle 3 Cycle 4 Cycle 5 Cycle 6 Same problem, w ith two single-iss ue processors = inserted for s ynchronization Fig. : Dual processor execution
- 19. 19 Types of Software Parallelism • Control Parallelism – two or more operations can be performed s imultaneously. This can be detected by a compiler, or a programmer can explicitly indicate control parallelism by using special language c onstructs or dividing a program into multiple processes. • Data parallelism – multiple data elements have the same operatio ns applied to them at the same time. This offers the highest potentia l for concurrency (in SIMD and MIMD modes). Synchronization in SIMD machines handled by hardware.
- 20. 20 Solving the Mismatch Problems • Develop compilation support • Redesign hardware for more efficient exploitation by compilers • Use large register files and sustained instruction pipelining. • Have the compiler fill the branch and load delay slots in code genera ted for RISC processors.
- 21. 21 The Role of Compilers • Compilers used to exploit hardware features to improve performanc e. • Interaction between compiler and architecture design is a necessity i n modern computer development. • It is not necessarily the case that more software parallelism will impr ove performance in conventional scalar processors. • The hardware and compiler should be designed at the same time.
- 22. 22 Program Partitioning & Scheduling • The size of the parts or pieces of a program that can be considered fo r parallel execution can vary. • The sizes are roughly classified using the term “granule size,” or sim ply “granularity.” • The simplest measure, for example, is the number of instructions in a program part. • Grain sizes are usually described as fine, medium or coarse, dependi ng on the level of parallelism involved.
- 23. 23 Latency • Latency is the time required for communication between different s ubsystems in a computer. • Memory latency, for example, is the time required by a processor to access memory. • Synchronization latency is the time required for two processes to sy nchronize their execution. • Computational granularity and communication latency are closely re lated.
- 24. 24 Levels of Parallelism Jobs or programs Instructions or statements Non-recursive loops or unfolded iterations Procedures, subroutines, tasks, or coroutines Subprograms, job steps or related parts of a program } } Coarse grain Medium grain }Fine grain Increasing com munication dem and and scheduli ng overhead Higher degree of parallelism
- 25. 25 Instruction Level Parallelism • This fine-grained, or smallest granularity level typically involves less than 20 instructions per grain. The number of candidates for paralle l execution varies from 2 to thousands, with about five instructions o r statements (on the average) being the average level of parallelism. • Advantages: o There are usually many candidates for parallel execution o Compilers can usually do a reasonable job of finding this parallelism
- 26. 26 Loop-level Parallelism • Typical loop has less than 500 instructions. • If a loop operation is independent between iterations, it can be handl ed by a pipeline, or by a SIMD machine. • Most optimized program construct to execute on a parallel or vector machine • Some loops (e.g. recursive) are difficult to handle. • Loop-level parallelism is still considered fine grain computation.
- 27. 27 Procedure-level Parallelism • Medium-sized grain; usually less than 2000 instructions. • Detection of parallelism is more difficult than with smaller grains; in terprocedural dependence analysis is difficult and history-sensitive. • Communication requirement less than instruction-level • SPMD (single procedure multiple data) is a special case • Multitasking belongs to this level.
- 28. 28 Subprogram-level Parallelism • Job step level; grain typically has thousands of instructions; medium - or coarse-grain level. • Job steps can overlap across different jobs. • Multiprograming conducted at this level • No compilers available to exploit medium- or coarse-grain parallelis m at present.
- 29. 29 Job or Program-Level Parallelism • Corresponds to execution of essentially independent jobs or program s on a parallel computer. • This is practical for a machine with a small number of powerful proc essors, but impractical for a machine with a large number of simple processors (since each processor would take too long to process a sin gle job).
- 30. 30 Communication Latency • Balancing granularity and latency can yield better performance. • Various latencies attributed to machine architecture, technology, an d communication patterns used. • Latency imposes a limiting factor on machine scalability. Ex. Memo ry latency increases as memory capacity increases, limiting the amou nt of memory that can be used with a given tolerance for communica tion latency.
- 31. 31 Interprocessor Communication Latency • Needs to be minimized by system designer • Affected by signal delays and communication patterns • Ex. n communicating tasks may require n (n - 1)/2 communication li nks, and the complexity grows quadratically, effectively limiting the number of processors in the system.
- 32. 32 Grain Packing and Scheduling • Two questions: o How can I partition a program into parallel “pieces” to yield the shorte st execution time? o What is the optimal size of parallel grains? • There is an obvious tradeoff between the time spent scheduling and synchronizing parallel grains and the speedup obtained by paralle l execution. • Solution is both problem-dependent and machine-dependent. • Goal is to produce a short schedule for fast execution of subdivided prog ram modules. • One approach to the problem is called “grain packing”
- 33. 33 Program Graphs and Packing • A program graph is similar to a dependence graph o Nodes = { (n,s) }, where n = node name, s = size (larger s = larger grain siz e). o Edges = { (v,d) }, where v = variable being “communicated,” and d = com munication delay. • Packing two (or more) nodes produces a node with a larger grain siz e and possibly more edges to other nodes. • Packing is done to eliminate unnecessary communication dela ys or reduce overall scheduling overhead.
- 34. 34EENG-630 - Chapter 2
- 35. 35 Scheduling • A schedule is a mapping of nodes to processors and start times such that communication delay requirements are observed, and no two n odes are executing on the same processor at the same time. • Some general scheduling goals o Schedule all fine-grain activities in a node to the same processor to minim ize communication delays. o Select grain sizes for packing to achieve better schedules for a particular p arallel machine.
- 37. 37 Static multiprocessor scheduling • Grain packing may not be optimal • Dynamic multiprocessor scheduling is an NP-hard problem • Node duplication is a static scheme for multiprocessor scheduling
- 38. 38 Node duplication • Duplicate some nodes to eliminate idle time and reduce communicat ion delays • Grain packing and node duplication are often used jointly to determi ne the best grain size and corresponding schedule
- 39. 39 Schedule without node duplication A,4 a,1 b,1 c,8 a,8 c,1 C,1B,1 D,2 E,2 e,4d,4 P1 P2 P2P1 A D B I E C I4 6 13 21 27 23 20 16 14 12 4
- 40. 40 Schedule with node duplication A,4 a,1 b,1 c,1 a,1 c,1 C’,1B,1 D,2 E,2 P1 P2 P2P1 A D B E C A 4 6 10 14 13 9 6 4 C,1 A’,4 a,1 C 7
- 41. 41 Grain determination and scheduling optimization Step 1: Construct a fine-grain program graph Step 2: Schedule the fine-grain computation Step 3: Grain packing to produce coarse grains Step 4: Generate a parallel schedule based on the packed graph
- 42. 42 System Interconnect Architectures • Direct networks for static connections • Indirect networks for dynamic connections • Networks are used for o internal connections in a centralized system among • processors • memory modules • I/O disk arrays o distributed networking of multicomputer nodes
- 43. 43 Goals and Analysis • The goals of an interconnection network are to provide o low-latency o high data transfer rate o wide communication bandwidth • Analysis includes o latency o bisection bandwidth o data-routing functions o scalability of parallel architecture
- 44. 44 Network Properties and Routing • Static networks: point-to-point direct connections that will not chan ge during program execution • Dynamic networks: o switched channels dynamically configured to match user program commu nication demands o include buses, crossbar switches, and multistage networks • Both network types also used for inter-PE data routing in SIMD com puters
- 45. 45 Network Parameters • Network size: The number of nodes (links or channels) in the graph used to represent the network • Node Degree d: The number of edges incident to a node. In the case of unidirectional channels, the number of channels into a node is t he in degree and that out of a node is the out degree. Then the node degree is the sum of the two. • Network Diameter D: The maximum shortest path between any two nodes
- 46. 46 Network Parameters (cont.) • Bisection Width: o Channel bisection width b: The minimum number of edges (channels) along the cut that divides the network in two equal halves o Each channel has w bit wires o Wire bisection width: B=b*w; B is the wiring density of the network. It provides a good indicator of the max communication bandwidth along the bisection of the network
- 47. 47 Terminology - 1 • Network usually represented by a graph with a finite nu mber of nodes linked by directed or undirected edges. • Number of nodes in graph = network size . • Number of edges (links or channels) incident on a node = node degree d (also note in and out degrees when edges a re directed). Node degree reflects number of I/O ports as sociated with a node, and should ideally be small and con stant. • Diameter D of a network is the maximum shortest path b etween any two nodes, measured by the number of links t raversed; this should be as small as possible (from a com munication point of view).
- 48. 48 Terminology - 2 • Channel bisection width b = minimum number of edges cut to split a network into two parts each having the same numb er of nodes. Since each channel has w bit wires, the wire bis ection width B = bw. Bisection width provides good indicati on of maximum communication bandwidth along the bisecti on of a network, and all other cross sections should be boun ded by the bisection width. • Wire (or channel) length = length (e.g. weight) of edges bet ween nodes. • Network is symmetric if the topology is the same looking fro m any node; these are easier to implement or to program. • Other useful characterizing properties: homogeneous nodes ? buffered channels? nodes are switches?
- 49. 49 Data Routing Functions Data-routing network used for inter-PE data exchange. This network ca n be static (i.e: hypercube) or dynamic (i.e: multistage network) Commonly data-routing functions includes: • Shifting • Rotating • Permutation (one to one) • Broadcast (one to all) • Multicast (many to many) • Personalized broadcast (one to many) • Shuffle • Exchange • Etc.
- 50. 50 Hypercube Routing Functions • If the vertices of a n-dimensional cube are labeled with n-bit number s so that only one bit differs between each pair of adjacent vertices, t hen n routing functions are defined by the bits in the node (vertex) a ddress. • For example, with a 3-dimensional cube, we can easily identify routi ng functions that exchange data between nodes with addresses that differ in the least significant, most significant, or middle bit. • Figure: 2.15
- 51. 51 Factors Affecting Network Performance • Functionality – how the network supports data routing, interrupt handling, synchronization, request/message combining, and cohere nce • Network latency – worst-case time for a unit message to be transf erred • Bandwidth – maximum data rate • Hardware complexity – implementation costs for wire, logic, swi tches, connectors, etc. • Scalability – how easily does the scheme adapt to an increasing nu mber of processors, memories, etc.?
- 52. 52 Static Networks • Linear Array • Ring and Chordal Ring • Barrel Shifter • Tree and Star • Fat Tree • Mesh and Torus
- 53. 53 Static Networks – Linear Array • N nodes connected by n-1 links (not a bus); segments between differ ent pairs of nodes can be used in parallel. • Internal nodes have degree 2; end nodes have degree 1. • Diameter = n-1 • Bisection = 1 • For small n, this is economical, but for large n, it is obviously inappr opriate.
- 54. 54 Static Networks – Ring, Chordal Ring • Like a linear array, but the two end nodes are connected by an n th li nk; the ring can be uni- or bi-directional. Diameter is n/2 for a b idirectional ring, or n for a unidirectional ring. • By adding additional links (e.g. “chords” in a circle), the node degree is increased, and we obtain a chordal ring. This reduces the network diameter. • In the limit, we obtain a fully-connected network, with a node degree of n -1 and a diameter of 1.
- 55. 55 Static Networks – Barrel Shifter • Like a ring, but with additional links between all pairs of nodes that have a distance equal to a power of 2. • With a network of size N = 2n, each node has degree d = 2n -1, and th e network has diameter D = n /2. • Barrel shifter connectivity is greater than any chordal ring of lower n ode degree. • Barrel shifter much less complex than fully-interconnected network.
- 56. 56
- 57. 57 Static Networks – Tree and Star • A k-level completely balanced binary tree will have N = 2k – 1 nodes, with maximum node degree of 3 and network diameter is 2(k – 1). • The balanced binary tree is scalable, since it has a constant maximu m node degree. • A star is a two-level tree with a node degree d = N – 1 and a constant diameter of 2.
- 58. 58 Static Networks – Fat Tree • A fat tree is a tree in which the number of edges between nodes incre ases closer to the root (similar to the way the thickness of limbs incre ases in a real tree as we get closer to the root). • The edges represent communication channels (“wires”), and since co mmunication traffic increases as the root is approached, it seems log ical to increase the number of channels there.
- 59. 59 Static Networks – Mesh and Torus • Pure mesh – N = n k nodes with links between each adjacent pair of nodes in a row or column (or higher degree). This is not a symmetri c network; interior node degree d = 2k, diameter = k (n – 1). • Illiac mesh (used in Illiac IV computer) – wraparound is allowed, th us reducing the network diameter to about half that of the equivalent pure mesh. • A torus has ring connections in each dimension, and is symmetric. An n n binary torus has node degree of 4 and a diameter of 2 n / 2 .
- 60. 60 Static Networks – Systolic Array • A systolic array is an arrangement of processing elements and comm unication links designed specifically to match the computation and c ommunication requirements of a specific algorithm (or class of algor ithms). • This specialized character may yield better performance than more g eneralized structures, but also makes them more expensive, and mor e difficult to program.
- 61. 61 Network Throughput • Network throughput – number of messages a network can handle in a unit time interval. • One way to estimate is to calculate the maximum number of message s that can be present in a network at any instant (its capacity); throu ghput usually is some fraction of its capacity. • A hot spot is a pair of nodes that accounts for a disproportionately la rge portion of the total network traffic (possibly causing congestion). • Hot spot throughput is maximum rate at which messages can be sen t between two specific nodes.
- 62. 62 Dynamic Connection Networks • Dynamic connection networks can implement all communication pa tterns based on program demands. • In increasing order of cost and performance, these include o bus systems o multistage interconnection networks o crossbar switch networks • Price can be attributed to the cost of wires, switches, arbiters, and co nnectors. • Performance is indicated by network bandwidth, data transfer rate, network latency, and communication patterns supported.
- 63. 63 Dynamic Networks – Bus Systems • A bus system (contention bus, time-sharing bus) has o a collection of wires and connectors o multiple modules (processors, memories, peripherals, etc.) which con nect to the wires o data transactions between pairs of modules • Bus supports only one transaction at a time. • Bus arbitration logic must deal with conflicting requests. • Lowest cost and bandwidth of all dynamic schemes. • Many bus standards are available.
- 64. 64 Dynamic Networks – Switch Modules • An a b switch module has a inputs and b outputs. A binary switch has a = b = 2. • It is not necessary for a = b, but usually a = b = 2k, for some integer k . • In general, any input can be connected to one or more of the outputs . However, multiple inputs may not be connected to the same output . • When only one-to-one mappings are allowed, the switch is called a c rossbar switch.
- 65. 65 Multistage Networks • In general, any multistage network is comprised of a collection of a b switch modules and fixed network modules. The a b s witch modules are used to provide variable permutation or other reordering of the inputs, which are then further reordered by the fixed network modules. • A generic multistage network consists of a sequence alternating dynamic switches (with relatively small values for a and b) with st atic networks (with larger numbers of inputs and outputs). The stati c networks are used to implement interstage connections (ISC).
- 66. 66 Omega Network • A 2 2 switch can be configured for o Straight-through o Crossover o Upper broadcast (upper input to both outputs) o Lower broadcast (lower input to both outputs) o (No output is a somewhat vacuous possibility as well) • With four stages of eight 2 2 switches, and a static perf ect shuffle for each of the four ISCs, a 16 by 16 Omega net work can be constructed (but not all permutations are po ssible). • In general , an n-input Omega network requires log 2 n st ages of 2 2 switches and n / 2 switch modules.
- 67. 67
- 68. 68 Baseline Network • A baseline network can be shown to be topologically equivalent to ot her networks (including Omega), and has a simple recursive generati on procedure. • Stage k (k = 0, 1, …) is an m m switch block (where m = N / 2k ) co mposed entirely of 2 2 switch blocks, each having two configuratio ns: straight through and crossover.
- 69. 69 4 4 Baseline Network
- 70. 70 Crossbar Networks • A m n crossbar network can be used to provide a constant latency con nection between devices; it can be thought of as a single stage switch. • Different types of devices can be connected, yielding different constraint s on which switches can be enabled. o With m processors and n memories, one processor may be able to generate request s for multiple memories in sequence; thus several switches might be set in the same row. o For m m interprocessor communication, each PE is connected to both an input a nd an output of the crossbar; only one switch in each row and column can be turne d on simultaneously. Additional control processors are used to manage the crossba r itself.