Monte-Carlo method for Two-Stage SLP
0 likes•279 views

This document presents a detailed lecture on the Monte Carlo method for solving two-stage stochastic linear programming problems, focusing on various estimation techniques and optimality testing. It outlines the iterative stochastic procedure for gradient search and discusses methods for regulating sample sizes during optimization. The conclusions emphasize the development of a stochastic adaptive method that ensures convergence through adjustments based on Monte Carlo estimates and statistical accuracy.


![Two-stage stochastic optimization
problem
F ( x) c x E min y [q y | W y T x h, y R ] min
m
Ax b, x n ,
assume vectors q, h and matrices W, T random in
general.](https://image.slidesharecdn.com/lecture5-100818114346-phpapp01/85/Monte-Carlo-method-for-Two-Stage-SLP-3-320.jpg)


![Two-stage stochastic optimization problem with
complete recourse will be
F ( x ) c x E Q ( x, ) min n
xD
subject to the feasible set
D x A x b, x R
n
where
Q( x, ) min y [q y | W y T x h, y R ]
m](https://image.slidesharecdn.com/lecture5-100818114346-phpapp01/85/Monte-Carlo-method-for-Two-Stage-SLP-6-320.jpg)
![It can be derived under the assumption on the existence
of a solution at the second stage and continuity of
measure P, that the objective function is smoothly
differentiable and the gradient is
x F ( x) Eg ( x, )
where
g ( x, ) c T u *
is given by the set of solutions of the dual problem
(h T x)T u * max u [(h T x)T u | u W T q 0, u R ]
s](https://image.slidesharecdn.com/lecture5-100818114346-phpapp01/85/Monte-Carlo-method-for-Two-Stage-SLP-7-320.jpg)








![The starting point can be obtained as the solution of the
deterministic linear problem:
( x 0 , y 0 ) arg min[c x q y | A x b, W y T x h, y R , x R ].
m n
x, y
The iterative stochastic procedure of gradient search could
be used further:
xt 1 xt t G ( xt )
where t t (Gt ) is the step-length multiplier and
x
G G( xt )
t
-feasible the projection of gradient
estimator to the ε
is set.
V xt](https://image.slidesharecdn.com/lecture5-100818114346-phpapp01/85/Monte-Carlo-method-for-Two-Stage-SLP-16-320.jpg)










Monte-Carlo method for Two-Stage SLP
- 1. Lecture 5 Monte-Carlo method for Two-Stage SLP Leonidas Sakalauskas Institute of Mathematics and Informatics Vilnius, Lithuania <[email protected]> EURO Working Group on Continuous Optimization
- 2. Content Introduction Monte Carlo estimators Stochastic Differentiation -feasible gradient approach for two-stage SLP Interior-point method for two stage SLP Testing optimality Convergence analysis Counterexample
- 3. Two-stage stochastic optimization problem F ( x) c x E min y [q y | W y T x h, y R ] min m Ax b, x n , assume vectors q, h and matrices W, T random in general.
- 4. Two-stage stochastic optimization problem Say, vector h can be distributed multivariate normally: N ( , S ) here , S are correspondingly the vector of means and the covariance matrix
- 5. Two-stage stochastic optimization problem the random vector Z distributed with respect to N ( , S ) is simulated as Z R T is standard normal vector, R is triangle matrix that RT R S (Choletzky factorization)
- 6. Two-stage stochastic optimization problem with complete recourse will be F ( x ) c x E Q ( x, ) min n xD subject to the feasible set D x A x b, x R n where Q( x, ) min y [q y | W y T x h, y R ] m
- 7. It can be derived under the assumption on the existence of a solution at the second stage and continuity of measure P, that the objective function is smoothly differentiable and the gradient is x F ( x) Eg ( x, ) where g ( x, ) c T u * is given by the set of solutions of the dual problem (h T x)T u * max u [(h T x)T u | u W T q 0, u R ] s
- 8. Monte-Carlo samples We assume here that the Monte-Carlo sample of a certain size N is provided for any x D n Y ( y1, y 2 ,..., y N ), the sampling estimator of the objective function 1 N F ( x) f ( x, y ) j N j 1 and sampling variance can be computed 1 N 2 D ( x) 2 f ( x, y j ) F ( x) N 1 j 1
- 9. Gradient The gradient is evaluated using the same random sample: 1 N g ( x) g ( x, y ), j N j 1 xD R n
- 10. Covariance matrix We use the sampling covariance matrix 1 N g x, y g x g x, y g x T A( x) j j N n j 1 later on for normalising the gradient estimator.
- 11. – feasible direction approach Let us define the set of feasible directions as follows: V ( x) g Ag 0, 1in g j 0, if x j 0 n
- 12. Gradient projection Denote, gU as projection of vector g onto the set U. Since the objective function is differentiable, the solution xD is optimal if F x V 0
- 13. Gradient projection the projection of G onto the set Ax 0 is GA G P T P I A A A T T 1 A where is projector
- 14. Assume a certain multiplier 0 to be given. Define the function : V ( x) x by 1 j n g j 0 xj x ( g ) min , min( ) ˆ 1j 0, g j g j n Thus, x g D , when x ( g ), for any g V x , x D
- 15. Now, let a certain small value 0 be given. Then we introduce the function x : V ( x) x ( g ) maxmin x j , g j , ˆ ˆ g 0 , 1 j n 1 j n j g j 0 x ( g ) 0 , if 1 j n ( g j 0) and define the ε - feasible set V ( x) g n Ag 0, 1i n g j 0, if 0 x j x ( g )
- 16. The starting point can be obtained as the solution of the deterministic linear problem: ( x 0 , y 0 ) arg min[c x q y | A x b, W y T x h, y R , x R ]. m n x, y The iterative stochastic procedure of gradient search could be used further: xt 1 xt t G ( xt ) where t t (Gt ) is the step-length multiplier and x G G( xt ) t -feasible the projection of gradient estimator to the ε is set. V xt
- 17. Monte-Carlo sample size problem There is no a great necessity to compute estimators with a high accuracy on starting the optimisation, because then it suffices only to approximately evaluate the direction leading to the optimum. Therefore, one can obtain not so large samples at the beginning of the optimum search and, later on, increase the size of samples so as to get the estimate of the objective function with a desired accuracy just at the time of decision making on finding the solution to the optimisation problem.
- 18. We propose a following version for regulating the sample size: n Fish( , nt , N t nt ) N min max t 1 ~ t T ~ t n t ,N min ,N max (G( x ) ( A( x t ))1 (G( x ) t
- 19. Statistical testing of the optimality hypothesis The optimality hypothesis could be accepted for some point x t with significance 1 , if the following condition is sattisfied ~ ~ ( N t nt ) ( g ( x t ))T A( x t ) 1 g ( x t ) T2 Fish( , nt , N t nt ) nt Next, we can use the asymptotic normality again and decide that the objective function is estimated with a permissible accuracy , if its confidence bound does not exceed this value: ~ t D( x ) / N t
- 20. Computer simulation Two-stage stochastic linear optimisation problem. Dimensions of the task are as follows: the first stage has 10 rows and 20 variables; the second stage has 20 rows and 30 variables. http://www.math.bme.hu/~deak/twostage/ l1/20x20.1/ (2006-01-20).
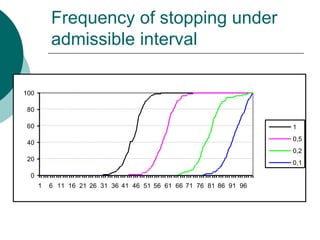
- 21. Two stage stochastic programing The estimate of the optimal value of the objective function given in the database is 182.94234 0.066 N0=Nmin=100 Nmax=10000. Maximal number of iterations tmax 100 , generation of trials was broken when the estimated confidence interval of the objective function exceeds admissible value . Initial data were as follows: = =0.95; 0.99, 0.1; 0.2; 0.5; 1.0.
- 22. Frequency of stopping under admissible interval 100 80 60 1 0,5 40 0,2 20 0,1 0 1 6 11 16 21 26 31 36 41 46 51 56 61 66 71 76 81 86 91 96
- 23. Change of the objective function under admissible interval 184,5 184 0,1 183,5 0,2 183 0,5 182,5 1 182 1 12 23 34 45 56 67 78 89 100
- 24. Change of confidence interval under admissible interval 7 6 5 0,1 4 0,2 3 0,5 2 1 1 0 1 8 15 22 29 36 43 50 57 64 71 78 85 92 99
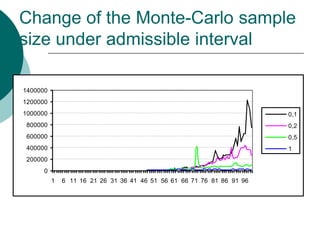
- 25. Change of the Monte-Carlo sample size under admissible interval 1400000 1200000 1000000 0,1 800000 0,2 600000 0,5 400000 1 200000 0 1 6 11 16 21 26 31 36 41 46 51 56 61 66 71 76 81 86 91 96
- 26. Hotelling statistics under admissible interval 10 9 8 7 0,1 6 0,2 5 4 0,5 3 1 2 1 0 1 11 21 31 41 51 61 71 81 91
- 27. t Nj Histogram of ratio Nt j 1 under admissible interval 30 25 20 0,1 0,2 15 0,5 1 10 5 0 8 10 12 14 16 18 20 22 24 26 28 30 32 34 36
- 28. Wrap-Up and Conclisions The stochastic adaptive method has been developed to solve stochastic linear problems by a finite sequence of Monte-Carlo sampling estimators The method is grounded by adaptive regulation of the size of Monte-Carlo samples and the statistical termination procedure, taking into consideration the statistical modeling accuracy The proposed adjustment of sample size, when it is taken inversely proportional to the square of the norm of the Monte-Carlo estimate of the gradient, guarantees the convergence a. s. at a linear rate