Object Detection (D2L5 Insight@DCU Machine Learning Workshop 2017)
2 likes1,423 views

This document provides an overview of object detection techniques including region-based and region-free methods. Region-based methods like R-CNN, Fast R-CNN, and Faster R-CNN first generate region proposals then extract features from those regions to classify and regress bounding boxes. Region-free methods like YOLO, YOLOv2, and SSD predict bounding boxes and classifications directly from the image in one pass. Both approaches are trained end-to-end using techniques like RoI pooling and anchor boxes to predict multiple detections. Recent work aims to improve speed and accuracy by generating detections sequentially or using soft NMS instead of hard thresholding.
1 of 59
Downloaded 107 times



![Object Detection as Classification
Classes = [cat, dog, duck]
Cat ? NO
Dog ? NO
Duck? NO
4](https://image.slidesharecdn.com/dlmmdcud2l05objectdetection-170429103817/85/Object-Detection-D2L5-Insight-DCU-Machine-Learning-Workshop-2017-4-320.jpg)
![Classes = [cat, dog, duck]
Cat ? NO
Dog ? NO
Duck? NO
5
Object Detection as Classification](https://image.slidesharecdn.com/dlmmdcud2l05objectdetection-170429103817/85/Object-Detection-D2L5-Insight-DCU-Machine-Learning-Workshop-2017-5-320.jpg)
![Classes = [cat, dog, duck]
Cat ? YES
Dog ? NO
Duck? NO
6
Object Detection as Classification](https://image.slidesharecdn.com/dlmmdcud2l05objectdetection-170429103817/85/Object-Detection-D2L5-Insight-DCU-Machine-Learning-Workshop-2017-6-320.jpg)
![Classes = [cat, dog, duck]
Cat ? NO
Dog ? NO
Duck? NO
7
Object Detection as Classification](https://image.slidesharecdn.com/dlmmdcud2l05objectdetection-170429103817/85/Object-Detection-D2L5-Insight-DCU-Machine-Learning-Workshop-2017-7-320.jpg)




![Region Proposals
Selective Search (SS) Multiscale Combinatorial Grouping (MCG)
[SS] Uijlings et al. Selective search for object recognition. IJCV 2013
[MCG] Arbeláez, Pont-Tuset et al. Multiscale combinatorial grouping. CVPR 2014 13](https://image.slidesharecdn.com/dlmmdcud2l05objectdetection-170429103817/85/Object-Detection-D2L5-Insight-DCU-Machine-Learning-Workshop-2017-13-320.jpg)













































Ad
Recommended
Deep Learning for Computer Vision: Object Detection (UPC 2016)
Deep Learning for Computer Vision: Object Detection (UPC 2016)Universitat Politècnica de Catalunya The document discusses advancements in object detection techniques, focusing on deep convolutional networks and proposals for region detection. It compares various models including R-CNN, Fast R-CNN, and Faster R-CNN, highlighting their speed and accuracy improvements over time. Additionally, it touches on architectures like YOLO and SSD, and presents training resources related to these methods.
Auro tripathy - Localizing with CNNs
Auro tripathy - Localizing with CNNsAuro Tripathy The document discusses advancements in object detection using convolutional neural networks (CNNs), focusing on techniques such as region-based CNN (R-CNN) and its successors, Fast R-CNN and Faster R-CNN. It highlights key concepts like bounding box regression, mean average precision, and the importance of CNNs for accurate localization and detection. Additionally, it addresses approaches such as YOLO and SSD that improve the speed and accuracy of object detection by employing innovative architectures.
D1L5 Visualization (D1L2 Insight@DCU Machine Learning Workshop 2017)
D1L5 Visualization (D1L2 Insight@DCU Machine Learning Workshop 2017)Universitat Politècnica de Catalunya The document covers various visualization techniques in deep learning, including learned weights, activation analysis, class activation maps (CAMs), and methods like DeepDream and neural style transfer. Key concepts include the importance of occlusion experiments and gradient-based approaches for understanding neural network behavior. It references several studies and techniques that enhance image interpretation and extraction of features within convolutional neural networks.
150807 Fast R-CNN
150807 Fast R-CNNJunho Cho Fast R-CNN is a method that improves object detection speed and accuracy over previous methods like R-CNN and SPPnet. It uses a region of interest pooling layer and multi-task loss to jointly train a convolutional neural network for classification and bounding box regression in a single stage of training. This allows the entire network to be fine-tuned end-to-end for object detection, resulting in faster training and testing compared to previous methods while achieving state-of-the-art accuracy on standard datasets. Specifically, Fast R-CNN trains 9x faster than R-CNN and runs 200x faster at test time.
Object Detection - Míriam Bellver - UPC Barcelona 2018
Object Detection - Míriam Bellver - UPC Barcelona 2018Universitat Politècnica de Catalunya The document presents a comprehensive overview of object detection methodologies, primarily focusing on both proposal-based and proposal-free approaches. It details various techniques such as R-CNN, Fast R-CNN, Faster R-CNN, Mask R-CNN, YOLO, and SSD, along with their strengths and weaknesses. The discussion includes the evolution of these methods in terms of efficiency and performance metrics like test time and mean average precision.
Object Detection Methods using Deep Learning
Object Detection Methods using Deep LearningSungjoon Choi The document discusses object detection techniques including R-CNN, SPPnet, Fast R-CNN, and Faster R-CNN. R-CNN uses region proposals and CNN features to classify each region. SPPnet improves efficiency by computing CNN features once for the whole image. Fast R-CNN further improves efficiency by sharing computation and using a RoI pooling layer. Faster R-CNN introduces a region proposal network to generate proposals, achieving end-to-end training. The techniques showed improved accuracy and processing speed over prior methods.
Recent Progress on Object Detection_20170331
Recent Progress on Object Detection_20170331Jihong Kang The document discusses recent advancements in object detection, emphasizing the challenges in detecting small objects and reviewing various methods including R-CNN, YOLO, and SSD. It highlights proposed solutions such as hourglass structures, multi-scale features, and ROI alignment techniques, along with comparisons of selected papers and their approaches. Key recommendations for improving detection performance include better base networks and diverse training techniques.
#6 PyData Warsaw: Deep learning for image segmentation
#6 PyData Warsaw: Deep learning for image segmentationMatthew Opala The document discusses deep learning techniques for image segmentation, specifically focusing on clothing parsing using methods like convolutional neural networks (CNNs) and fully convolutional networks (FCNs). It presents a case study utilizing datasets with annotated clothing categories and compares models like Deeplab and CRFs in terms of their accuracy, precision, and recall. Results indicate the effectiveness of these models in detecting and segmenting clothing items, emphasizing the benefits of combining detection and segmentation approaches.
150424 Scalable Object Detection using Deep Neural Networks
150424 Scalable Object Detection using Deep Neural NetworksJunho Cho DeepMultiBox is a scalable object detection method using deep neural networks that detects objects in a class-agnostic manner. It predicts bounding boxes and confidence scores using a single DNN. It formulates object detection as a regression problem to optimize bounding box coordinates and confidences. It was shown to achieve competitive detection results on PASCAL VOC 2007 with faster runtime than other methods.
Video Object Segmentation - Laura Leal-Taixé - UPC Barcelona 2018
Video Object Segmentation - Laura Leal-Taixé - UPC Barcelona 2018Universitat Politècnica de Catalunya Professor Laura Leal-Taixé discusses advancements in dynamic scene understanding and video object segmentation, focusing on accurately segmenting every pixel in videos. The architecture incorporates various techniques, including boundary snapping and semantic propagation, to enhance segmentation accuracy and consistency. Experiments indicate that leveraging semantic information significantly improves temporal stability in dynamic scenes.
CNN vs SIFT-based Visual Localization - Laura Leal-Taixé - UPC Barcelona 2018
CNN vs SIFT-based Visual Localization - Laura Leal-Taixé - UPC Barcelona 2018Universitat Politècnica de Catalunya The document discusses the challenges and limitations of visual localization methods, particularly comparing SIFT-based and CNN-based approaches. It highlights the need for separate models for different scenes and the dependency on hyperparameters for loss functions in current techniques. The proposed methods aim to improve relative pose estimation and localization accuracy by introducing a single network that can generalize across scenes without needing scene-specific hyperparameters.
SSD: Single Shot MultiBox Detector (UPC Reading Group)
SSD: Single Shot MultiBox Detector (UPC Reading Group)Universitat Politècnica de Catalunya The SSD (Single Shot Multibox Detector) is a novel deep learning-based object detection framework that predicts object boxes and category scores in a single forward pass of the network, significantly improving speed while maintaining accuracy compared to previous methods like Faster R-CNN and YOLO. It utilizes small convolutional filters applied to different scaled feature maps to enhance detection of various object sizes and aspect ratios. The experimental results affirm SSD's efficiency and precision, marking it as a strong contender in real-time object detection applications.
Object Detection Using R-CNN Deep Learning Framework
Object Detection Using R-CNN Deep Learning FrameworkNader Karimi The document discusses object detection using the R-CNN deep learning framework, detailing concepts such as inductive bias, region proposals, and different iterations of R-CNN including Fast R-CNN, Faster R-CNN, and Mask R-CNN. It explains the machine learning processes involved in classification, localization, and segmentation, specifically how selective search is employed for region proposals. The paper emphasizes the challenges and improvements in the R-CNN family of algorithms for efficient object detection.
Object Segmentation (D2L7 Insight@DCU Machine Learning Workshop 2017)
Object Segmentation (D2L7 Insight@DCU Machine Learning Workshop 2017)Universitat Politècnica de Catalunya The document discusses object segmentation in deep learning, detailing semantic and instance segmentation techniques along with various datasets used in the field. Key methods for semantic segmentation include fully convolutional networks and learnable upsampling, while instance segmentation is addressed through proposal-based methods and recurrent approaches. Various challenges and innovations in these techniques are highlighted, including the implementation of skip connections and dilated convolutions for enhanced performance.
Deep learning for object detection
Deep learning for object detectionWenjing Chen This document discusses and compares different methods for deep learning object detection, including region proposal-based methods like R-CNN, Fast R-CNN, Faster R-CNN, and Mask R-CNN as well as single shot methods like YOLO, YOLOv2, and SSD. Region proposal-based methods tend to have higher accuracy but are slower, while single shot methods are faster but less accurate. Newer methods like Faster R-CNN, R-FCN, YOLOv2, and SSD have improved speed and accuracy over earlier approaches.
Interpretability of Convolutional Neural Networks - Eva Mohedano - UPC Barcel...
Interpretability of Convolutional Neural Networks - Eva Mohedano - UPC Barcel...Universitat Politècnica de Catalunya The document outlines various methodologies for visualizing and interpreting neural networks, notably focusing on learned weights, activations, and gradient-based techniques. Key concepts discussed include class activation maps, occlusion experiments, and activation maximization, with references to notable research papers in the field. Additionally, it introduces practical applications and tools for training and visualizing deep learning models.
Adaptive object detection using adjacency and zoom prediction
Adaptive object detection using adjacency and zoom predictionUniversitat Politècnica de Catalunya The document discusses a novel object detection algorithm called az-net, which utilizes adaptive search strategies and zoom prediction to enhance efficiency in generating object proposals. It demonstrates comparable accuracy to faster r-cnn while requiring significantly fewer anchors, thus optimizing computational resources. The study evaluates its performance on datasets such as Pascal VOC 2007 and MSCOCO, showcasing improved accuracy in region proposals.
Towards Set Learning and Prediction - Laura Leal-Taixe - UPC Barcelona 2018
Towards Set Learning and Prediction - Laura Leal-Taixe - UPC Barcelona 2018Universitat Politècnica de Catalunya The document discusses advancements in deep neural networks concerning set learning and prediction, highlighting the shift from traditional structured data to handling more complex, unordered sets. It outlines technical difficulties in processing such inputs and presents emerging techniques like DeepSetNet and Deep Perm-Set Net that aim to address these challenges. Applications span various fields, including object detection, instance-level segmentation, and graph problems.
Multiple Object Tracking - Laura Leal-Taixe - UPC Barcelona 2018
Multiple Object Tracking - Laura Leal-Taixe - UPC Barcelona 2018Universitat Politècnica de Catalunya The document discusses multiple object tracking and dynamic scene understanding, emphasizing techniques such as semantic segmentation, instance-based segmentation, and tracking-by-detection. It highlights the application of linear programming for tracking, along with methods for modeling pedestrian interactions using physics-based models and deep learning. The findings point to the importance of handling unknown detections and trajectory lengths, aiming for improvements in appearance models and multi-detector fusion.
Advanced deep learning based object detection methods
Advanced deep learning based object detection methodsBrodmann17 The document discusses advanced deep learning methods for object detection, focusing on improving non-maximum suppression (NMS), multi-scale detection, and the implementation of focal loss for better class imbalance handling. It highlights the transition from traditional NMS to learned approaches and introduces architectures such as Feature Pyramid Networks (FPN) and Mask R-CNN, emphasizing their efficiency and effectiveness in various object detection tasks. Additionally, it references practical benchmarks and external educational resources for deeper exploration of the topic.
Detection
Detectionsimplyinsimple This document describes several object detection methods: R-CNN, SPP-Net, Fast R-CNN, and a unified approach. R-CNN was slow due to processing each region of interest separately. SPP-Net addressed this with spatial pyramid pooling to process regions together. Fast R-CNN further improved speed by jointly training the detector. A unified approach aims to detect objects without extracting regions of interest by dividing the image into grids and predicting objects within each grid.
Recurrent Instance Segmentation (UPC Reading Group)
Recurrent Instance Segmentation (UPC Reading Group)Universitat Politècnica de Catalunya The document presents a method for recurrent instance segmentation, highlighting an end-to-end approach utilizing a convolutional LSTM (ConvLSTM) model. It discusses the model's architecture, including a spatial inhibition module and a custom loss function designed for accurate instance segmentation across experiments involving multiple person segmentation and plant leaf counting. The findings indicate promising results, demonstrating the model's efficacy in handling occlusions and memory retention of segmented regions.
160205 NeuralArt - Understanding Neural Representation
160205 NeuralArt - Understanding Neural RepresentationJunho Cho The document summarizes three papers on neural representations presented at a seminar:
1. Texture synthesis using convolutional neural networks (CNNs) to generate new texture samples matching a source texture based on gram matrices of CNN feature maps.
2. Reconstructing images from feature maps of CNNs trained on object recognition to understand neural representations.
3. A neural algorithm of artistic style that combines the content of one image and style of another using CNN representations of content and style.
Codetecon #KRK 3 - Object detection with Deep Learning
Codetecon #KRK 3 - Object detection with Deep LearningMatthew Opala The document discusses object detection using deep learning, covering various models such as R-CNN, Fast R-CNN, Faster R-CNN, YOLO, and SSD, along with their advantages and disadvantages. It highlights different approaches to training and evaluating object detection systems, including the use of region proposals and classification techniques. Additionally, it compares the performance of different models in terms of speed and accuracy on popular datasets.
Mask-RCNN for Instance Segmentation
Mask-RCNN for Instance SegmentationDat Nguyen Mask R-CNN is an algorithm for instance segmentation that builds upon Faster R-CNN by adding a branch for predicting masks in parallel with bounding boxes. It uses a Feature Pyramid Network to extract features at multiple scales, and RoIAlign instead of RoIPool for better alignment between masks and their corresponding regions. The architecture consists of a Region Proposal Network for generating candidate object boxes, followed by two branches - one for classification and box regression, and another for predicting masks with a fully convolutional network using per-pixel sigmoid activations and binary cross-entropy loss. Mask R-CNN achieves state-of-the-art performance on standard instance segmentation benchmarks.
Object detection - RCNNs vs Retinanet
Object detection - RCNNs vs RetinanetRishabh Indoria The document discusses various object detection methods, including selective search, R-CNN, and the Fast R-CNN approach, focusing on their advantages and disadvantages related to training time and proposal quality. It highlights the importance of region proposals and introduces the Faster R-CNN, which employs a Region Proposal Network (RPN) for improved proposal generation. Additionally, it covers advancements like Focal Loss and the use of Feature Pyramid Networks (FPN) to enhance detection accuracy across different scales and contexts.
#10 pydata warsaw object detection with dn ns
#10 pydata warsaw object detection with dn nsAndrew Brozek The document provides an overview of object detection techniques using deep learning, highlighting various models and approaches such as R-CNN, Fast R-CNN, Faster R-CNN, and YOLO. It compares detection methods based on speed, accuracy, and training complexity while discussing advancements like multi-scale training and class hierarchies. The conclusion emphasizes the effectiveness of state-of-the-art models like ResNet-101 combined with SSD for high performance in both classification and localization tasks.
Unsupervised Deep Learning (D2L1 Insight@DCU Machine Learning Workshop 2017)
Unsupervised Deep Learning (D2L1 Insight@DCU Machine Learning Workshop 2017)Universitat Politècnica de Catalunya The document discusses various techniques for unsupervised and semi-supervised learning in deep learning, highlighting the importance of learning from unlabelled data. It covers methods like autoencoders, the manifold hypothesis, and the use of energy-based models, alongside assumptions necessary for modeling data. The work emphasizes current advancements and ongoing research in this field.
D3L4-objects.pdf
D3L4-objects.pdfssusere945ae This document discusses object detection in images using deep convolutional neural networks. It begins by framing object detection as classification at multiple positions and scales. The document then reviews early approaches like HOG and deformable part models before introducing R-CNN and its improvements, Fast R-CNN and Faster R-CNN, which share computation between proposals. Faster R-CNN introduces a region proposal network to generate proposals. Finally, it briefly discusses one-stage detectors like YOLO and SSD that directly predict boxes and classes.
SimCLR: A Simple Framework for Contrastive Learning of Visual Representations
SimCLR: A Simple Framework for Contrastive Learning of Visual Representationsynxm25hpxp This document discusses object detection techniques including two-stage detectors like R-CNN and Faster R-CNN which use region proposals and classification, and one-stage detectors like YOLO that perform end-to-end detection. It also covers transformer-based detectors like DTER that use attention and object queries for set prediction. Traditional methods used hand-crafted features and classifiers while deep learning methods leverage features from neural networks. Localization identifies objects in images while classification determines the object class.
More Related Content
What's hot (20)
150424 Scalable Object Detection using Deep Neural Networks
150424 Scalable Object Detection using Deep Neural NetworksJunho Cho DeepMultiBox is a scalable object detection method using deep neural networks that detects objects in a class-agnostic manner. It predicts bounding boxes and confidence scores using a single DNN. It formulates object detection as a regression problem to optimize bounding box coordinates and confidences. It was shown to achieve competitive detection results on PASCAL VOC 2007 with faster runtime than other methods.
Video Object Segmentation - Laura Leal-Taixé - UPC Barcelona 2018
Video Object Segmentation - Laura Leal-Taixé - UPC Barcelona 2018Universitat Politècnica de Catalunya Professor Laura Leal-Taixé discusses advancements in dynamic scene understanding and video object segmentation, focusing on accurately segmenting every pixel in videos. The architecture incorporates various techniques, including boundary snapping and semantic propagation, to enhance segmentation accuracy and consistency. Experiments indicate that leveraging semantic information significantly improves temporal stability in dynamic scenes.
CNN vs SIFT-based Visual Localization - Laura Leal-Taixé - UPC Barcelona 2018
CNN vs SIFT-based Visual Localization - Laura Leal-Taixé - UPC Barcelona 2018Universitat Politècnica de Catalunya The document discusses the challenges and limitations of visual localization methods, particularly comparing SIFT-based and CNN-based approaches. It highlights the need for separate models for different scenes and the dependency on hyperparameters for loss functions in current techniques. The proposed methods aim to improve relative pose estimation and localization accuracy by introducing a single network that can generalize across scenes without needing scene-specific hyperparameters.
SSD: Single Shot MultiBox Detector (UPC Reading Group)
SSD: Single Shot MultiBox Detector (UPC Reading Group)Universitat Politècnica de Catalunya The SSD (Single Shot Multibox Detector) is a novel deep learning-based object detection framework that predicts object boxes and category scores in a single forward pass of the network, significantly improving speed while maintaining accuracy compared to previous methods like Faster R-CNN and YOLO. It utilizes small convolutional filters applied to different scaled feature maps to enhance detection of various object sizes and aspect ratios. The experimental results affirm SSD's efficiency and precision, marking it as a strong contender in real-time object detection applications.
Object Detection Using R-CNN Deep Learning Framework
Object Detection Using R-CNN Deep Learning FrameworkNader Karimi The document discusses object detection using the R-CNN deep learning framework, detailing concepts such as inductive bias, region proposals, and different iterations of R-CNN including Fast R-CNN, Faster R-CNN, and Mask R-CNN. It explains the machine learning processes involved in classification, localization, and segmentation, specifically how selective search is employed for region proposals. The paper emphasizes the challenges and improvements in the R-CNN family of algorithms for efficient object detection.
Object Segmentation (D2L7 Insight@DCU Machine Learning Workshop 2017)
Object Segmentation (D2L7 Insight@DCU Machine Learning Workshop 2017)Universitat Politècnica de Catalunya The document discusses object segmentation in deep learning, detailing semantic and instance segmentation techniques along with various datasets used in the field. Key methods for semantic segmentation include fully convolutional networks and learnable upsampling, while instance segmentation is addressed through proposal-based methods and recurrent approaches. Various challenges and innovations in these techniques are highlighted, including the implementation of skip connections and dilated convolutions for enhanced performance.
Deep learning for object detection
Deep learning for object detectionWenjing Chen This document discusses and compares different methods for deep learning object detection, including region proposal-based methods like R-CNN, Fast R-CNN, Faster R-CNN, and Mask R-CNN as well as single shot methods like YOLO, YOLOv2, and SSD. Region proposal-based methods tend to have higher accuracy but are slower, while single shot methods are faster but less accurate. Newer methods like Faster R-CNN, R-FCN, YOLOv2, and SSD have improved speed and accuracy over earlier approaches.
Interpretability of Convolutional Neural Networks - Eva Mohedano - UPC Barcel...
Interpretability of Convolutional Neural Networks - Eva Mohedano - UPC Barcel...Universitat Politècnica de Catalunya The document outlines various methodologies for visualizing and interpreting neural networks, notably focusing on learned weights, activations, and gradient-based techniques. Key concepts discussed include class activation maps, occlusion experiments, and activation maximization, with references to notable research papers in the field. Additionally, it introduces practical applications and tools for training and visualizing deep learning models.
Adaptive object detection using adjacency and zoom prediction
Adaptive object detection using adjacency and zoom predictionUniversitat Politècnica de Catalunya The document discusses a novel object detection algorithm called az-net, which utilizes adaptive search strategies and zoom prediction to enhance efficiency in generating object proposals. It demonstrates comparable accuracy to faster r-cnn while requiring significantly fewer anchors, thus optimizing computational resources. The study evaluates its performance on datasets such as Pascal VOC 2007 and MSCOCO, showcasing improved accuracy in region proposals.
Towards Set Learning and Prediction - Laura Leal-Taixe - UPC Barcelona 2018
Towards Set Learning and Prediction - Laura Leal-Taixe - UPC Barcelona 2018Universitat Politècnica de Catalunya The document discusses advancements in deep neural networks concerning set learning and prediction, highlighting the shift from traditional structured data to handling more complex, unordered sets. It outlines technical difficulties in processing such inputs and presents emerging techniques like DeepSetNet and Deep Perm-Set Net that aim to address these challenges. Applications span various fields, including object detection, instance-level segmentation, and graph problems.
Multiple Object Tracking - Laura Leal-Taixe - UPC Barcelona 2018
Multiple Object Tracking - Laura Leal-Taixe - UPC Barcelona 2018Universitat Politècnica de Catalunya The document discusses multiple object tracking and dynamic scene understanding, emphasizing techniques such as semantic segmentation, instance-based segmentation, and tracking-by-detection. It highlights the application of linear programming for tracking, along with methods for modeling pedestrian interactions using physics-based models and deep learning. The findings point to the importance of handling unknown detections and trajectory lengths, aiming for improvements in appearance models and multi-detector fusion.
Advanced deep learning based object detection methods
Advanced deep learning based object detection methodsBrodmann17 The document discusses advanced deep learning methods for object detection, focusing on improving non-maximum suppression (NMS), multi-scale detection, and the implementation of focal loss for better class imbalance handling. It highlights the transition from traditional NMS to learned approaches and introduces architectures such as Feature Pyramid Networks (FPN) and Mask R-CNN, emphasizing their efficiency and effectiveness in various object detection tasks. Additionally, it references practical benchmarks and external educational resources for deeper exploration of the topic.
Detection
Detectionsimplyinsimple This document describes several object detection methods: R-CNN, SPP-Net, Fast R-CNN, and a unified approach. R-CNN was slow due to processing each region of interest separately. SPP-Net addressed this with spatial pyramid pooling to process regions together. Fast R-CNN further improved speed by jointly training the detector. A unified approach aims to detect objects without extracting regions of interest by dividing the image into grids and predicting objects within each grid.
Recurrent Instance Segmentation (UPC Reading Group)
Recurrent Instance Segmentation (UPC Reading Group)Universitat Politècnica de Catalunya The document presents a method for recurrent instance segmentation, highlighting an end-to-end approach utilizing a convolutional LSTM (ConvLSTM) model. It discusses the model's architecture, including a spatial inhibition module and a custom loss function designed for accurate instance segmentation across experiments involving multiple person segmentation and plant leaf counting. The findings indicate promising results, demonstrating the model's efficacy in handling occlusions and memory retention of segmented regions.
160205 NeuralArt - Understanding Neural Representation
160205 NeuralArt - Understanding Neural RepresentationJunho Cho The document summarizes three papers on neural representations presented at a seminar:
1. Texture synthesis using convolutional neural networks (CNNs) to generate new texture samples matching a source texture based on gram matrices of CNN feature maps.
2. Reconstructing images from feature maps of CNNs trained on object recognition to understand neural representations.
3. A neural algorithm of artistic style that combines the content of one image and style of another using CNN representations of content and style.
Codetecon #KRK 3 - Object detection with Deep Learning
Codetecon #KRK 3 - Object detection with Deep LearningMatthew Opala The document discusses object detection using deep learning, covering various models such as R-CNN, Fast R-CNN, Faster R-CNN, YOLO, and SSD, along with their advantages and disadvantages. It highlights different approaches to training and evaluating object detection systems, including the use of region proposals and classification techniques. Additionally, it compares the performance of different models in terms of speed and accuracy on popular datasets.
Mask-RCNN for Instance Segmentation
Mask-RCNN for Instance SegmentationDat Nguyen Mask R-CNN is an algorithm for instance segmentation that builds upon Faster R-CNN by adding a branch for predicting masks in parallel with bounding boxes. It uses a Feature Pyramid Network to extract features at multiple scales, and RoIAlign instead of RoIPool for better alignment between masks and their corresponding regions. The architecture consists of a Region Proposal Network for generating candidate object boxes, followed by two branches - one for classification and box regression, and another for predicting masks with a fully convolutional network using per-pixel sigmoid activations and binary cross-entropy loss. Mask R-CNN achieves state-of-the-art performance on standard instance segmentation benchmarks.
Object detection - RCNNs vs Retinanet
Object detection - RCNNs vs RetinanetRishabh Indoria The document discusses various object detection methods, including selective search, R-CNN, and the Fast R-CNN approach, focusing on their advantages and disadvantages related to training time and proposal quality. It highlights the importance of region proposals and introduces the Faster R-CNN, which employs a Region Proposal Network (RPN) for improved proposal generation. Additionally, it covers advancements like Focal Loss and the use of Feature Pyramid Networks (FPN) to enhance detection accuracy across different scales and contexts.
#10 pydata warsaw object detection with dn ns
#10 pydata warsaw object detection with dn nsAndrew Brozek The document provides an overview of object detection techniques using deep learning, highlighting various models and approaches such as R-CNN, Fast R-CNN, Faster R-CNN, and YOLO. It compares detection methods based on speed, accuracy, and training complexity while discussing advancements like multi-scale training and class hierarchies. The conclusion emphasizes the effectiveness of state-of-the-art models like ResNet-101 combined with SSD for high performance in both classification and localization tasks.
Unsupervised Deep Learning (D2L1 Insight@DCU Machine Learning Workshop 2017)
Unsupervised Deep Learning (D2L1 Insight@DCU Machine Learning Workshop 2017)Universitat Politècnica de Catalunya The document discusses various techniques for unsupervised and semi-supervised learning in deep learning, highlighting the importance of learning from unlabelled data. It covers methods like autoencoders, the manifold hypothesis, and the use of energy-based models, alongside assumptions necessary for modeling data. The work emphasizes current advancements and ongoing research in this field.
Video Object Segmentation - Laura Leal-Taixé - UPC Barcelona 2018
Video Object Segmentation - Laura Leal-Taixé - UPC Barcelona 2018Universitat Politècnica de Catalunya
CNN vs SIFT-based Visual Localization - Laura Leal-Taixé - UPC Barcelona 2018
CNN vs SIFT-based Visual Localization - Laura Leal-Taixé - UPC Barcelona 2018Universitat Politècnica de Catalunya
Object Segmentation (D2L7 Insight@DCU Machine Learning Workshop 2017)
Object Segmentation (D2L7 Insight@DCU Machine Learning Workshop 2017)Universitat Politècnica de Catalunya
Interpretability of Convolutional Neural Networks - Eva Mohedano - UPC Barcel...
Interpretability of Convolutional Neural Networks - Eva Mohedano - UPC Barcel...Universitat Politècnica de Catalunya
Towards Set Learning and Prediction - Laura Leal-Taixe - UPC Barcelona 2018
Towards Set Learning and Prediction - Laura Leal-Taixe - UPC Barcelona 2018Universitat Politècnica de Catalunya
Multiple Object Tracking - Laura Leal-Taixe - UPC Barcelona 2018
Multiple Object Tracking - Laura Leal-Taixe - UPC Barcelona 2018Universitat Politècnica de Catalunya
Unsupervised Deep Learning (D2L1 Insight@DCU Machine Learning Workshop 2017)
Unsupervised Deep Learning (D2L1 Insight@DCU Machine Learning Workshop 2017)Universitat Politècnica de Catalunya
Similar to Object Detection (D2L5 Insight@DCU Machine Learning Workshop 2017) (20)
D3L4-objects.pdf
D3L4-objects.pdfssusere945ae This document discusses object detection in images using deep convolutional neural networks. It begins by framing object detection as classification at multiple positions and scales. The document then reviews early approaches like HOG and deformable part models before introducing R-CNN and its improvements, Fast R-CNN and Faster R-CNN, which share computation between proposals. Faster R-CNN introduces a region proposal network to generate proposals. Finally, it briefly discusses one-stage detectors like YOLO and SSD that directly predict boxes and classes.
SimCLR: A Simple Framework for Contrastive Learning of Visual Representations
SimCLR: A Simple Framework for Contrastive Learning of Visual Representationsynxm25hpxp This document discusses object detection techniques including two-stage detectors like R-CNN and Faster R-CNN which use region proposals and classification, and one-stage detectors like YOLO that perform end-to-end detection. It also covers transformer-based detectors like DTER that use attention and object queries for set prediction. Traditional methods used hand-crafted features and classifiers while deep learning methods leverage features from neural networks. Localization identifies objects in images while classification determines the object class.
“Understanding, Selecting and Optimizing Object Detectors for Edge Applicatio...
“Understanding, Selecting and Optimizing Object Detectors for Edge Applicatio...Edge AI and Vision Alliance The document provides a comprehensive overview of object detection (OD) models, including the evolution from traditional methods to modern transformer-based techniques like DETR. It discusses the challenges, applications, and considerations for optimizing OD systems specifically for edge devices, highlighting various model architectures and their trade-offs in terms of accuracy and speed. Additionally, the document outlines future directions and potential advancements in the field of object detection.
Faster R-CNN: Towards real-time object detection with region proposal network...
Faster R-CNN: Towards real-time object detection with region proposal network...Universitat Politècnica de Catalunya The document discusses Faster R-CNN, a real-time object detection framework that integrates a Region Proposal Network (RPN) to enhance efficiency by sharing convolutional features with the object detection network. It outlines the methodology behind Faster R-CNN, including how the RPN generates proposals, the training steps involved, and experiments that demonstrate its superior proposal quality and detection speed compared to previous methods. Faster R-CNN serves as a foundation for leading object detection systems in significant competitions.
object detection paper review
object detection paper reviewYoonho Na - R-CNN was the first CNN model to achieve high performance in object detection. It used a multi-stage pipeline involving region proposals, feature extraction via CNN, and SVM classification. It was slow due to computing CNN features for each region individually.
- Fast R-CNN improved on R-CNN by introducing a ROI pooling layer to share computation and enabling end-to-end training. However, region proposals were still generated externally, slowing down detection.
- Faster R-CNN addressed this by introducing a Region Proposal Network to generate proposals, allowing the entire model to be trained end-to-end. This led to faster and more accurate detection compared to previous models.
- YOLO
Fast methods for deep learning based object detection
Fast methods for deep learning based object detectionBrodmann17 The document discusses improvements made to deep learning based object detection models. It describes issues with the R-CNN model such as slow training and testing speeds. The Fast R-CNN model is then introduced which improves on R-CNN by only extracting features once and using ROI pooling for faster training and testing. Faster R-CNN further improves speed by incorporating a Region Proposal Network to generate proposals instead of using selective search. Finally, SSD is discussed as a single-shot detector that evaluates detections at multiple scales for real-time performance. Throughout, techniques for improving accuracy such as hard negative mining and data augmentation are also covered.
IRJET- Object Detection and Recognition using Single Shot Multi-Box Detector
IRJET- Object Detection and Recognition using Single Shot Multi-Box DetectorIRJET Journal This document summarizes research on object detection and recognition using the Single Shot Multi-Box Detector (SSD) deep learning model. SSD improves on existing object detection systems by eliminating the need for generating object proposals and resampling pixels or features, thereby making detection faster and encapsulating all computation in a single neural network. The researchers applied SSD to standard datasets like PASCAL VOC, COCO, and ILSVRC and achieved competitive accuracy compared to methods using additional proposal steps, with SSD running significantly faster at 59 FPS. Experimental results on PASCAL VOC using SSD achieved a mean average precision of 74.3%, outperforming a comparable Faster R-CNN model.
Cvpr 2017 Summary Meetup
Cvpr 2017 Summary MeetupAmir Alush The document summarizes key highlights and research presented at CVPR 2017, focusing on advances in computer vision and deep learning, particularly in object detection, segmentation, and pose estimation. Notable papers include discussions on YOLO9000, Mask R-CNN, and multi-person pose estimation methods, showcasing improvements in accuracy and efficiency. The document also underscores the need for optimization in deep learning models to enhance performance across various applications.
Brodmann17 CVPR 2017 review - meetup slides
Brodmann17 CVPR 2017 review - meetup slides Brodmann17 The document summarizes Assaf Mushinsky's presentation at CVPR 2017. Some key points:
- He discussed state-of-the-art research in object detection, segmentation, pose estimation, and network architectures from papers presented at CVPR 2017.
- Papers presented efficient object detection methods that improved speed and accuracy trade-offs like YOLO9000 and Feature Pyramid Networks. Mask R-CNN was discussed for instance segmentation and pose estimation.
- New network architectures like Densely Connected Networks, Xception, and ResNeXt were covered that improved accuracy and efficiency over ResNet and Inception.
- The presentation highlighted recent advances in computer vision from the CVPR conference but did not cover older
Improving region based CNN object detector using bayesian optimization
Improving region based CNN object detector using bayesian optimizationAmgad Muhammad The document discusses the evolution of region-based CNN object detectors, highlighting the limitations of previous models like R-CNN, SPP-Net, and Fast R-CNN, particularly in terms of training time and reliance on external region proposal algorithms. It proposes a solution utilizing Bayesian optimization to improve the quality of region proposals in object detection by iteratively refining the locations of proposed regions for better localization. The methodology involves querying the CNN for region scores, fitting a model, and optimizing a utility function to effectively sample new regions that maximize detection accuracy.
Tutorial on Object Detection (Faster R-CNN)
Tutorial on Object Detection (Faster R-CNN)Hwa Pyung Kim The document describes Faster R-CNN, an object detection method that uses a Region Proposal Network (RPN) to generate region proposals from feature maps, pools features from each proposal into a fixed size using RoI pooling, and then classifies and regresses bounding boxes for each proposal using a convolutional network. The RPN outputs objectness scores and bounding box adjustments for anchor boxes sliding over the feature map, and non-maximum suppression is applied to reduce redundant proposals.
Anchor free object detection by deep learning
Anchor free object detection by deep learningYu Huang The document provides an overview of various advanced anchor-free object detection methods in deep learning, including UnitBox, DenseBox, YOLO series, CornerNet, and FCOS. Key innovations include the use of intersection over union (IOU) loss for bounding box predictions, detecting objects as points or keypoints, and eliminating the need for predefined anchor boxes for better accuracy and robustness. Techniques like feature pyramid networks and guided anchoring are highlighted to enhance object localization and detection performance across diverse object scales and shapes.
A Brief History of Object Detection / Tommi Kerola
A Brief History of Object Detection / Tommi KerolaPreferred Networks The document presents a comprehensive overview of the evolution of object detection methods, detailing the transition from early handcrafted feature techniques to current deep learning approaches. It highlights key methodologies including two-stage methods, single-shot methods, and anchor-free methods, while also addressing ongoing challenges such as the reliance on non-maximum suppression and suboptimal bounding box representations. The conclusion emphasizes the significant advancements brought about by deep learning and suggests that anchor-free methods are increasingly favorable for fast and accurate object detection.
“Understanding DNN-Based Object Detectors,” a Presentation from Au-Zone Techn...
“Understanding DNN-Based Object Detectors,” a Presentation from Au-Zone Techn...Edge AI and Vision Alliance The document provides an overview of deep learning based object detection models. It discusses early approaches like R-CNN, Fast R-CNN, and Faster R-CNN, as well as more recent single-shot detectors like YOLO, SSD, RetinaNet, and CenterNet. It covers performance metrics like mean average precision (mAP) and compares the speed and accuracy of different models. The document concludes by outlining general guidelines for choosing an object detection model based on priorities like accuracy, speed, model size, and portability.
Object Detection An Overview
Object Detection An Overviewijtsrd The document provides an overview of an object detection algorithm aimed at accurately identifying and classifying objects in video frames, which is critical for applications like autonomous driving. It discusses the motivation behind creating high-performance detection models, the limitations faced such as occlusion and illumination issues, and evaluates various deep learning approaches including one-stage (YOLO, SSD) and two-stage (R-CNN, Fast R-CNN, Faster R-CNN) methods. The proposed model demonstrates effective results using the COCO dataset, achieving high confidence in object detection while still needing improvements in accuracy.
YOLO_review.pptxThis is a test document that is used to satisfy the requireme...
YOLO_review.pptxThis is a test document that is used to satisfy the requireme...gaojinming318 This is a test document that is used to satisfy the requirement to upload two documents.
Object Detection is a very powerful field.pptx
Object Detection is a very powerful field.pptxusmanyaseen16 The document provides an overview of the evolution of object detection methodologies, tracing the shift from hand-crafted feature detectors to deep learning approaches like OverFeat, R-CNN, and YOLO. It discusses the transition from two-stage processes that relied on region proposals to more streamlined one-stage detection methods that prioritize speed while sacrificing some accuracy. Key innovations include the introduction of Region Proposal Networks in Faster R-CNN, and the Single Shot Multibox Detector (SSD), which employs multi-scale detection and default bounding boxes to improve performance and efficiency.
IISc Internship Report
IISc Internship ReportHarshilJain26 This document summarizes an academic paper that proposes a method for incrementally training object detection models to classify unseen object classes in real-time. It begins by providing background on object detection techniques like YOLO and SSD that can perform detection in a single pass. The paper aims to improve these single-shot detectors through incremental learning to classify new object classes without retraining the entire model from scratch. It conducted experiments on YOLO and VGG16 to investigate how well they can classify objects from unseen classes and whether their performance is affected by factors like background, bounding box size, or network architecture. The goal is to develop a more robust object detection method that can easily adapt to new classes of objects in real-time applications.
Faster R-CNN - PR012
Faster R-CNN - PR012Jinwon Lee Faster R-CNN improves object detection by introducing a Region Proposal Network (RPN) that shares full-image convolutional features with the detection network, thus enabling nearly cost-free region proposals. The RPN slides over feature maps and predicts object bounds and objectness at each position. During training, anchors are assigned positive or negative labels based on Intersection over Union with ground truth boxes. Faster R-CNN runs the RPN in parallel with Fast R-CNN for detection, end-to-end in a single network and stage. This achieves state-of-the-art object detection speed and accuracy while eliminating computationally expensive selective search for proposals.
IRJET- Weakly Supervised Object Detection by using Fast R-CNN
IRJET- Weakly Supervised Object Detection by using Fast R-CNNIRJET Journal This document summarizes a research paper that proposes using Fast R-CNN (Region-based Convolutional Neural Network) for weakly supervised object detection. The researchers introduce a Region Proposal Network (RPN) that is trained end-to-end to generate high-quality region proposals, which are then used by Fast R-CNN for detection. This approach helps overcome limitations of previous Multiple Instance Learning frameworks that provide false positives during training. The RPN represents the input image as a "bag of boxes" and iteratively selects a set of images and boxes that are more reliable.
“Understanding, Selecting and Optimizing Object Detectors for Edge Applicatio...
“Understanding, Selecting and Optimizing Object Detectors for Edge Applicatio...Edge AI and Vision Alliance
Faster R-CNN: Towards real-time object detection with region proposal network...
Faster R-CNN: Towards real-time object detection with region proposal network...Universitat Politècnica de Catalunya
“Understanding DNN-Based Object Detectors,” a Presentation from Au-Zone Techn...
“Understanding DNN-Based Object Detectors,” a Presentation from Au-Zone Techn...Edge AI and Vision Alliance
Ad
More from Universitat Politècnica de Catalunya (20)
Deep Generative Learning for All - The Gen AI Hype (Spring 2024)
Deep Generative Learning for All - The Gen AI Hype (Spring 2024)Universitat Politècnica de Catalunya The document discusses deep generative learning, contrasting discriminative and generative models, and explores various architectures including GANs, VAEs, and diffusion models for tasks such as image and music generation. It outlines the technical elements involved in training these models and acknowledges contributions from various researchers. The content emphasizes the advancements and applications of generative models across different domains, providing references to recent noteworthy works.
Deep Generative Learning for All
Deep Generative Learning for AllUniversitat Politècnica de Catalunya This document provides an overview of deep generative learning and summarizes several key generative models including GANs, VAEs, diffusion models, and autoregressive models. It discusses the motivation for generative models and their applications such as image generation, text-to-image synthesis, and enhancing other media like video and speech. Example state-of-the-art models are provided for each application. The document also covers important concepts like the difference between discriminative and generative modeling, sampling techniques, and the training procedures for GANs and VAEs.
The Transformer in Vision | Xavier Giro | Master in Computer Vision Barcelona...
The Transformer in Vision | Xavier Giro | Master in Computer Vision Barcelona...Universitat Politècnica de Catalunya The document discusses the Vision Transformer (ViT) model for computer vision tasks. It covers:
1. How ViT tokenizes images into patches and uses position embeddings to encode spatial relationships.
2. ViT uses a class embedding to trigger class predictions, unlike CNNs which have decoders.
3. The receptive field of ViT grows as the attention mechanism allows elements to attend to other distant elements in later layers.
4. Initial results showed ViT performance was comparable to CNNs when trained on large datasets but lagged CNNs trained on smaller datasets like ImageNet.
Towards Sign Language Translation & Production | Xavier Giro-i-Nieto
Towards Sign Language Translation & Production | Xavier Giro-i-NietoUniversitat Politècnica de Catalunya The document discusses advancements in sign language translation and production, highlighting the significance of accessibility for deaf individuals. It covers a range of topics, including a crash course on sign languages, the state-of-the-art How2Sign dataset, applications in real-world contexts, and ongoing challenges in the field. Key areas of research focus on neural sign language translation and production techniques to enhance communication and understanding across modalities.
The Transformer - Xavier Giró - UPC Barcelona 2021
The Transformer - Xavier Giró - UPC Barcelona 2021Universitat Politècnica de Catalunya Xavier Giro-I-Nieto's lecture on transformers outlines key mechanisms such as self-attention and multi-head self-attention, explaining their roles in natural language processing and image generation. The discussion also covers positional encodings and the removal of recurrent layers in the transformer architecture. Various references and studies are provided to support these concepts, demonstrating the broad applicability of transformers beyond language.
Learning Representations for Sign Language Videos - Xavier Giro - NIST TRECVI...
Learning Representations for Sign Language Videos - Xavier Giro - NIST TRECVI...Universitat Politècnica de Catalunya This document outlines the work of Xavier Giro-i-Nieto on learning representations for sign language videos, emphasizing instance search and action recognition through various methodologies. It details several research contributions, including advancements in visual search, video saliency prediction, and object segmentation, referencing various papers and results achieved in conferences and workshops. The document serves as a comprehensive overview of the evolution of techniques in multimedia analysis and sign language understanding.
Open challenges in sign language translation and production
Open challenges in sign language translation and productionUniversitat Politècnica de Catalunya The document discusses the challenges in sign language translation and production, emphasizing the importance of accessibility for the deaf community, particularly in light of the COVID-19 pandemic. It provides a brief overview of sign languages and highlights ongoing research and technological developments aimed at improving sign language recognition and translation. The document also addresses the complexities involved in developing effective models for translating and producing sign language content.
Generation of Synthetic Referring Expressions for Object Segmentation in Videos
Generation of Synthetic Referring Expressions for Object Segmentation in VideosUniversitat Politècnica de Catalunya The document discusses a method for generating synthetic referring expressions to improve object segmentation in videos, particularly using the YouTube-VIS dataset. It evaluates the generated expressions' effectiveness through experiments and concludes that while synthetic expressions do not outperform human-produced ones, they are beneficial for pre-training models without additional annotation costs. Future work involves enhancing the method with more cues and applying it to other datasets.
Discovery and Learning of Navigation Goals from Pixels in Minecraft
Discovery and Learning of Navigation Goals from Pixels in MinecraftUniversitat Politècnica de Catalunya The thesis explores self-supervised learning and reinforcement learning techniques for discovering navigation goals in Minecraft using pixel inputs. It discusses various approaches, including contrastive and variational methods, and presents experiments demonstrating successful skill acquisition from both random and expert trajectories. The findings indicate that expert trajectories can effectively facilitate skill discovery in an embodied AI context.
Learn2Sign : Sign language recognition and translation using human keypoint e...
Learn2Sign : Sign language recognition and translation using human keypoint e...Universitat Politècnica de Catalunya The document presents a master thesis on sign language recognition and translation using human keypoint estimation and a transformer model. It discusses the communication challenges faced by sign language users in digital environments and proposes solutions such as the creation of automatically generated subtitles and translations. The research includes using datasets like how2sign and examining methods and limitations of current sign language translation technologies.
Intepretability / Explainable AI for Deep Neural Networks
Intepretability / Explainable AI for Deep Neural NetworksUniversitat Politècnica de Catalunya This document discusses interpretability and explainable AI (XAI) in neural networks. It begins by providing motivation for why explanations of neural network predictions are often required. It then provides an overview of different interpretability techniques, including visualizing learned weights and feature maps, attribution methods like class activation maps and guided backpropagation, and feature visualization. Specific examples and applications of each technique are described. The document serves as a guide to interpretability and explainability in deep learning models.
Convolutional Neural Networks - Xavier Giro - UPC TelecomBCN Barcelona 2020
Convolutional Neural Networks - Xavier Giro - UPC TelecomBCN Barcelona 2020Universitat Politècnica de Catalunya The document provides an overview of convolutional neural networks (CNNs), detailing their architecture, interpretability, computation, receptive fields, and applications. It discusses the historical evolution of CNNs, key architectures such as LeNet and AlexNet, and the advantages of applying CNNs to various data types, including images, text, and speech. Additionally, it highlights techniques for improving accuracy and computational efficiency in training deep learning models.
Self-Supervised Audio-Visual Learning - Xavier Giro - UPC TelecomBCN Barcelon...
Self-Supervised Audio-Visual Learning - Xavier Giro - UPC TelecomBCN Barcelon...Universitat Politècnica de Catalunya The document presents a lecture outline on self-supervised audio-visual learning by Xavier Giro-i-Nieto, covering topics such as motivation, feature learning, cross-modal translation, and embodied AI. It discusses various self-supervised learning methods, including generative, predictive, and contrastive approaches, as well as their application in training models on unlabeled data. Key references and examples illustrate how ambient sounds can guide visual understanding, contributing to advancements in audio-visual model performance.
Attention for Deep Learning - Xavier Giro - UPC TelecomBCN Barcelona 2020
Attention for Deep Learning - Xavier Giro - UPC TelecomBCN Barcelona 2020Universitat Politècnica de Catalunya The document discusses attention mechanisms in various neural network applications, such as Seq2Seq models for machine translation and image captioning. Key concepts include the roles of keys, queries, and values, as well as different types of attention mechanisms like additive, multiplicative, and scaled dot product. Case studies demonstrate how attention improves the predictive capabilities of models in tasks involving images and automatic speech recognition.
Generative Adversarial Networks GAN - Xavier Giro - UPC TelecomBCN Barcelona ...
Generative Adversarial Networks GAN - Xavier Giro - UPC TelecomBCN Barcelona ...Universitat Politècnica de Catalunya Este documento trata sobre las redes generativas adversariales (GANs), explicando su estructura básica que consiste en un generador y un discriminador que compiten entre sí para mejorar la calidad de las muestras generadas. Se abordan aplicaciones como mejora de imágenes, generación de audio y traducción de lenguajes, así como la importancia de la formación adversarial en su desarrollo. Además, se mencionan investigaciones y pioneros en el campo de las GANs en la Universitat Politècnica de Catalunya.
Q-Learning with a Neural Network - Xavier Giró - UPC Barcelona 2020
Q-Learning with a Neural Network - Xavier Giró - UPC Barcelona 2020Universitat Politècnica de Catalunya The document discusses Q-learning and its integration with neural networks, focusing on Deep Q-Networks (DQN) and their evolution in deep reinforcement learning. It outlines several approaches and improvements to DQN, including Double DQN, Prioritized Experience Replay, and Dueling Networks, addressing challenges such as overestimation bias and sample efficiency. Additionally, it touches on methods for handling continuous actions in reinforcement learning, specifically through the use of Deep Deterministic Policy Gradient (DDPG).
Language and Vision with Deep Learning - Xavier Giró - ACM ICMR 2020 (Tutorial)
Language and Vision with Deep Learning - Xavier Giró - ACM ICMR 2020 (Tutorial)Universitat Politècnica de Catalunya The document outlines various models and techniques related to generative and discriminative tasks in language and vision, focusing on image and video captioning, visual question answering, and sign language translation. It references numerous studies and methods, including encoder-decoder representations, attention mechanisms, and multimodal machine translation. Key topics include combating data bias, dynamic memory networks, and advancements in visual reasoning and object grounding through language.
Image Segmentation with Deep Learning - Xavier Giro & Carles Ventura - ISSonD...
Image Segmentation with Deep Learning - Xavier Giro & Carles Ventura - ISSonD...Universitat Politècnica de Catalunya This document summarizes image segmentation techniques using deep learning. It begins with an overview of semantic segmentation and instance segmentation. It then discusses several techniques for semantic segmentation, including deconvolution/transposed convolution for learnable upsampling, skip connections to combine predictions from different CNN depths, and dilated convolutions to increase the receptive field without losing resolution. For instance segmentation, it covers proposal-based methods like Mask R-CNN, and single-shot and recurrent approaches as alternatives to proposal-based models.
Curriculum Learning for Recurrent Video Object Segmentation
Curriculum Learning for Recurrent Video Object SegmentationUniversitat Politècnica de Catalunya The document discusses curriculum learning applied to recurrent video object segmentation, presenting a methodology where training data is introduced progressively from simple to complex concepts. It explores the Kitti-MOTS dataset, describing an end-to-end recurrent network model for video object segmentation, along with various experimental setups and evaluation metrics. The conclusions highlight the importance of dataset understanding and suggest directions for future work, including further adjustments to training techniques.
Deep Self-supervised Learning for All - Xavier Giro - X-Europe 2020
Deep Self-supervised Learning for All - Xavier Giro - X-Europe 2020Universitat Politècnica de Catalunya The document provides an overview of representation learning, unsupervised, and self-supervised learning methods in machine learning and artificial intelligence. It covers key concepts such as predictive and contrastive methods, the role of autoencoders, and applications in video and image processing. The presentation includes various examples, research references, and visual representation strategies to enhance understanding of these learning paradigms.
Deep Generative Learning for All - The Gen AI Hype (Spring 2024)
Deep Generative Learning for All - The Gen AI Hype (Spring 2024)Universitat Politècnica de Catalunya
The Transformer in Vision | Xavier Giro | Master in Computer Vision Barcelona...
The Transformer in Vision | Xavier Giro | Master in Computer Vision Barcelona...Universitat Politècnica de Catalunya
Towards Sign Language Translation & Production | Xavier Giro-i-Nieto
Towards Sign Language Translation & Production | Xavier Giro-i-NietoUniversitat Politècnica de Catalunya
Learning Representations for Sign Language Videos - Xavier Giro - NIST TRECVI...
Learning Representations for Sign Language Videos - Xavier Giro - NIST TRECVI...Universitat Politècnica de Catalunya
Generation of Synthetic Referring Expressions for Object Segmentation in Videos
Generation of Synthetic Referring Expressions for Object Segmentation in VideosUniversitat Politècnica de Catalunya
Discovery and Learning of Navigation Goals from Pixels in Minecraft
Discovery and Learning of Navigation Goals from Pixels in MinecraftUniversitat Politècnica de Catalunya
Learn2Sign : Sign language recognition and translation using human keypoint e...
Learn2Sign : Sign language recognition and translation using human keypoint e...Universitat Politècnica de Catalunya
Convolutional Neural Networks - Xavier Giro - UPC TelecomBCN Barcelona 2020
Convolutional Neural Networks - Xavier Giro - UPC TelecomBCN Barcelona 2020Universitat Politècnica de Catalunya
Self-Supervised Audio-Visual Learning - Xavier Giro - UPC TelecomBCN Barcelon...
Self-Supervised Audio-Visual Learning - Xavier Giro - UPC TelecomBCN Barcelon...Universitat Politècnica de Catalunya
Attention for Deep Learning - Xavier Giro - UPC TelecomBCN Barcelona 2020
Attention for Deep Learning - Xavier Giro - UPC TelecomBCN Barcelona 2020Universitat Politècnica de Catalunya
Generative Adversarial Networks GAN - Xavier Giro - UPC TelecomBCN Barcelona ...
Generative Adversarial Networks GAN - Xavier Giro - UPC TelecomBCN Barcelona ...Universitat Politècnica de Catalunya
Q-Learning with a Neural Network - Xavier Giró - UPC Barcelona 2020
Q-Learning with a Neural Network - Xavier Giró - UPC Barcelona 2020Universitat Politècnica de Catalunya
Language and Vision with Deep Learning - Xavier Giró - ACM ICMR 2020 (Tutorial)
Language and Vision with Deep Learning - Xavier Giró - ACM ICMR 2020 (Tutorial)Universitat Politècnica de Catalunya
Image Segmentation with Deep Learning - Xavier Giro & Carles Ventura - ISSonD...
Image Segmentation with Deep Learning - Xavier Giro & Carles Ventura - ISSonD...Universitat Politècnica de Catalunya
Deep Self-supervised Learning for All - Xavier Giro - X-Europe 2020
Deep Self-supervised Learning for All - Xavier Giro - X-Europe 2020Universitat Politècnica de Catalunya
Ad
Recently uploaded (20)
美国毕业证范本中华盛顿大学学位证书CWU学生卡购买
美国毕业证范本中华盛顿大学学位证书CWU学生卡购买Taqyea 1:1原版中华盛顿大学毕业证+CWU成绩单【Q微:1954 292 140】鉴于此,CWUdiploma中华盛顿大学挂科处理解决方案CWU毕业证成绩单专业服务学历认证【Q微:1954 292 140】办理教育部学历认证,留学回国证明,中华盛顿大学毕业证、中华盛顿大学成绩单、中华盛顿大学文凭(留信学历认证+永久存档查询)办理本科+硕士+博士毕业证成绩单学历认证,我们一直是留学生的首选,质量行业第一,诚信可靠。
【中华盛顿大学成绩单一站式办理专业技术完美呈现Central Washington University Transcripts】
购买日韩成绩单、英国大学成绩单、美国大学成绩单、澳洲大学成绩单、加拿大大学成绩单(q微1954292140)新加坡大学成绩单、新西兰大学成绩单、爱尔兰成绩单、西班牙成绩单、德国成绩单。成绩单的意义主要体现在证明学习能力、评估学术背景、展示综合素质、提高录取率,以及是作为留信认证申请材料的一部分。
中华盛顿大学成绩单能够体现您的的学习能力,包括中华盛顿大学课程成绩、专业能力、研究能力。(q微1954292140)具体来说,成绩报告单通常包含学生的学习技能与习惯、各科成绩以及老师评语等部分,因此,成绩单不仅是学生学术能力的证明,也是评估学生是否适合某个教育项目的重要依据!
【主营项目】
一.毕业证【q微1954292140】成绩单、使馆认证、教育部认证、雅思托福成绩单、学生卡等!
二.真实使馆公证(即留学回国人员证明,不成功不收费)
三.真实教育部学历学位认证(教育部存档!教育部留服网站永久可查)
四.办理各国各大学文凭(一对一专业服务,可全程监控跟踪进度)
Prescriptive Process Monitoring Under Uncertainty and Resource Constraints: A...
Prescriptive Process Monitoring Under Uncertainty and Resource Constraints: A...Mahmoud Shoush We introduced Black-Box Prescriptive Process Monitoring (BB-PrPM) – a reinforcement learning approach that learns when, whether, and how to intervene in business processes to boost performance under real-world constraints.
This work is presented at the International Conference on Advanced Information Systems Engineering CAiSE Conference #CAiSE2025
Model Evaluation & Visualisation part of a series of intro modules for data ...
Model Evaluation & Visualisation part of a series of intro modules for data ...brandonlee626749 Model Evaluation & Visualisation part of a series of intro modules for data science
Measurecamp Copenhagen - Consent Context
Measurecamp Copenhagen - Consent ContextHuman37 Measurecamp Copenhagen 2025 presentation by Glenn Vanderlinden, Human37
最新版美国约翰霍普金斯大学毕业证(JHU毕业证书)原版定制
最新版美国约翰霍普金斯大学毕业证(JHU毕业证书)原版定制Taqyea 2025原版约翰霍普金斯大学毕业证书pdf电子版【q薇1954292140】美国毕业证办理JHU约翰霍普金斯大学毕业证书多少钱?【q薇1954292140】海外各大学Diploma版本,因为疫情学校推迟发放证书、证书原件丢失补办、没有正常毕业未能认证学历面临就业提供解决办法。当遭遇挂科、旷课导致无法修满学分,或者直接被学校退学,最后无法毕业拿不到毕业证。此时的你一定手足无措,因为留学一场,没有获得毕业证以及学历证明肯定是无法给自己和父母一个交代的。
【复刻约翰霍普金斯大学成绩单信封,Buy The Johns Hopkins University Transcripts】
购买日韩成绩单、英国大学成绩单、美国大学成绩单、澳洲大学成绩单、加拿大大学成绩单(q微1954292140)新加坡大学成绩单、新西兰大学成绩单、爱尔兰成绩单、西班牙成绩单、德国成绩单。成绩单的意义主要体现在证明学习能力、评估学术背景、展示综合素质、提高录取率,以及是作为留信认证申请材料的一部分。
约翰霍普金斯大学成绩单能够体现您的的学习能力,包括约翰霍普金斯大学课程成绩、专业能力、研究能力。(q微1954292140)具体来说,成绩报告单通常包含学生的学习技能与习惯、各科成绩以及老师评语等部分,因此,成绩单不仅是学生学术能力的证明,也是评估学生是否适合某个教育项目的重要依据!
我们承诺采用的是学校原版纸张(原版纸质、底色、纹路)我们工厂拥有全套进口原装设备,特殊工艺都是采用不同机器制作,仿真度基本可以达到100%,所有成品以及工艺效果都可提前给客户展示,不满意可以根据客户要求进行调整,直到满意为止!
【主营项目】
一、工作未确定,回国需先给父母、亲戚朋友看下文凭的情况,办理毕业证|办理文凭: 买大学毕业证|买大学文凭【q薇1954292140】约翰霍普金斯大学学位证明书如何办理申请?
二、回国进私企、外企、自己做生意的情况,这些单位是不查询毕业证真伪的,而且国内没有渠道去查询国外文凭的真假,也不需要提供真实教育部认证。鉴于此,办理美国成绩单约翰霍普金斯大学毕业证【q薇1954292140】国外大学毕业证, 文凭办理, 国外文凭办理, 留信网认证
Shifting Focus on AI: How it Can Make a Positive Difference
Shifting Focus on AI: How it Can Make a Positive Difference1508 A/S This morgenbooster will share how to find the positive impact of AI and how to integrate it into your own digital process.
624753984-Annex-A3-RPMS-Tool-for-Proficient-Teachers-SY-2024-2025.pdf
624753984-Annex-A3-RPMS-Tool-for-Proficient-Teachers-SY-2024-2025.pdfCristineGraceAcuyan The little toys
Residential Zone 4 for industrial village
Residential Zone 4 for industrial villageMdYasinArafat13 based on assumption that failure of such a weld is by shear on the
effective area whether the shear transfer is parallel to or
perpendicular to the axis of the line of fillet weld. In fact, the
strength is greater for shear transfer perpendicular to the weld axis;
however, for simplicity the situations are treated the same.
NVIDIA Triton Inference Server, a game-changing platform for deploying AI mod...
NVIDIA Triton Inference Server, a game-changing platform for deploying AI mod...Tamanna36 NVIDIA Triton Inference Server! 🌟
Learn how Triton streamlines AI model deployment with dynamic batching, support for TensorFlow, PyTorch, ONNX, and more, plus GPU-optimized performance. From YOLO11 object detection to NVIDIA Dynamo’s future, it’s your guide to scalable AI inference.
Check out the slides and share your thoughts! 👇
#AI #NVIDIA #TritonInferenceServer #MachineLearning
Object Detection (D2L5 Insight@DCU Machine Learning Workshop 2017)
- 1. Amaia Salvador [email protected] PhD Candidate Universitat Politècnica de Catalunya Object Detection Day 2 Lecture 5
- 2. Object Detection CAT, DOG, DUCK The task of assigning a label and a bounding box to all objects in the image 2
- 3. Object Detection: Datasets 3 20 categories 6k training images 6k validation images 10k test images 200 categories 456k training images 60k validation + test images 80 categories 200k training images 60k val + test images
- 4. Object Detection as Classification Classes = [cat, dog, duck] Cat ? NO Dog ? NO Duck? NO 4
- 5. Classes = [cat, dog, duck] Cat ? NO Dog ? NO Duck? NO 5 Object Detection as Classification
- 6. Classes = [cat, dog, duck] Cat ? YES Dog ? NO Duck? NO 6 Object Detection as Classification
- 7. Classes = [cat, dog, duck] Cat ? NO Dog ? NO Duck? NO 7 Object Detection as Classification
- 8. Problem: Too many positions & scales to test Solution: If your classifier is fast enough, go for it 8 Object Detection as Classification
- 9. HOG: Histogram of Oriented Gradients Dalal and Triggs. Histograms of Oriented Gradients for Human Detection. CVPR 2005 9
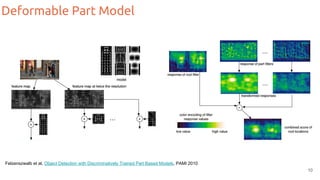
- 10. Deformable Part Model Felzenszwalb et al, Object Detection with Discriminatively Trained Part Based Models, PAMI 2010 10
- 11. Object Detection with ConvNets? Convnets are computationally demanding. We can’t test all positions & scales ! Solution: Look at a tiny subset of positions. Choose them wisely :) 11
- 12. Region Proposals ● Find “blobby” image regions that are likely to contain objects ● “Class-agnostic” object detector ● Look for “blob-like” regions Slide Credit: CS231n 12
- 13. Region Proposals Selective Search (SS) Multiscale Combinatorial Grouping (MCG) [SS] Uijlings et al. Selective search for object recognition. IJCV 2013 [MCG] Arbeláez, Pont-Tuset et al. Multiscale combinatorial grouping. CVPR 2014 13
- 14. Object Detection with Convnets: R-CNN Girshick et al. Rich feature hierarchies for accurate object detection and semantic segmentation. CVPR 2014 14
- 15. R-CNN Girshick et al. Rich feature hierarchies for accurate object detection and semantic segmentation. CVPR 2014 1. Train network on proposals 2. Post-hoc training of SVMs & Box regressors on fc7 features 15
- 16. R-CNN 16 We expect: We get:
- 17. R-CNN Girshick et al. Rich feature hierarchies for accurate object detection and semantic segmentation. CVPR 2014 1. Train network on proposals 2. Post-hoc training of SVMs & Box regressors on fc7 features 3. Non Maximum Suppression + score threshold 17
- 18. R-CNN Girshick et al. Rich feature hierarchies for accurate object detection and semantic segmentation. CVPR 2014 18
- 19. R-CNN: Problems 1. Slow at test-time: need to run full forward pass of CNN for each region proposal 2. SVMs and regressors are post-hoc: CNN features not updated in response to SVMs and regressors 3. Complex multistage training pipeline Slide Credit: CS231n 19
- 20. Fast R-CNN Girshick Fast R-CNN. ICCV 2015 Solution: Share computation of convolutional layers between region proposals for an image R-CNN Problem #1: Slow at test-time: need to run full forward pass of CNN for each region proposal 20
- 21. Fast R-CNN: Sharing features Hi-res input image: 3 x 800 x 600 with region proposal Convolution and Pooling Hi-res conv features: C x H x W with region proposal Fully-connected layers Max-pool within each grid cell RoI conv features: C x h x w for region proposal Fully-connected layers expect low-res conv features: C x h x w Slide Credit: CS231n 21Girshick Fast R-CNN. ICCV 2015
- 22. Fast R-CNN Solution: Train it all at together E2E R-CNN Problem #2&3: SVMs and regressors are post-hoc. Complex training. 22Girshick Fast R-CNN. ICCV 2015
- 23. Fast R-CNN: End-to-end training 23Girshick Fast R-CNN. ICCV 2015 Predicted class scores True class scores True box coordinates Predicted box coordinates Log loss Smooth L1 loss Only for positive boxes
- 24. Fast R-CNN: Positive / Negative Samples 24Girshick Fast R-CNN. ICCV 2015 Positive samples are defined as those whose IoU overlap with a ground-truth bounding box is > 0.5. Negative examples are sampled from those that have a maximum IoU overlap with ground truth in the interval [0.1, 0.5). 25%/75% ratio for positive/negative samples in a minibatch.
- 25. Fast R-CNN Slide Credit: CS231n R-CNN Fast R-CNN Training Time: 84 hours 9.5 hours (Speedup) 1x 8.8x Test time per image 47 seconds 0.32 seconds (Speedup) 1x 146x mAP (VOC 2007) 66.0 66.9 Using VGG-16 CNN on Pascal VOC 2007 dataset Faster! FASTER! Better! 25
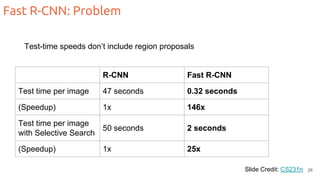
- 26. Fast R-CNN: Problem Slide Credit: CS231n R-CNN Fast R-CNN Test time per image 47 seconds 0.32 seconds (Speedup) 1x 146x Test time per image with Selective Search 50 seconds 2 seconds (Speedup) 1x 25x Test-time speeds don’t include region proposals 26
- 27. Faster R-CNN Conv layers Region Proposal Network FC6 Class probabilities FC7 FC8 RPN Proposals RoI Pooling Conv5_3 RPN Proposals 27 Ren et al. Faster R-CNN: Towards real-time object detection with region proposal networks. NIPS 2015 Learn proposals end-to-end sharing parameters with the classification network
- 28. Faster R-CNN Conv layers Region Proposal Network FC6 Class probabilities FC7 FC8 RPN Proposals RoI Pooling Conv5_3 RPN Proposals Fast R-CNN 28 Ren et al. Faster R-CNN: Towards real-time object detection with region proposal networks. NIPS 2015 Learn proposals end-to-end sharing parameters with the classification network
- 29. Region Proposal Network Objectness scores (object/no object) Bounding Box Regression In practice, k = 9 (3 different scales and 3 aspect ratios) 29 Ren et al. Faster R-CNN: Towards real-time object detection with region proposal networks. NIPS 2015
- 30. Region Proposal Network: Loss function 30 Predicted probability of being an object for anchor i i = anchor index in minibatch Coordinates of the predicted bounding box for anchor i Ground truth objectness label True box coordinates Ncls = Number of anchors in minibatch (~ 256) Nreg = Number of anchor locations ( ~ 2400) Log loss Smooth L1 loss In practice = 10, so that both terms are roughly equally balanced
- 31. Region Proposal Network: Positive / Negative Samples 31 An anchor is labeled as positive if: (a) the anchor is the one with highest IoU overlap with a ground-truth box (b) the anchor has an IoU overlap with a ground-truth box higher than 0.7 Negative labels are assigned to anchors with IoU lower than 0.3 for all ground-truth boxes. 50%/50% ratio of positive/negative anchors in a minibatch.
- 32. Faster R-CNN: Training Conv layers Region Proposal Network FC6 Class probabilities FC7 FC8 RPN Proposals RoI Pooling Conv5_3 RPN Proposals 32 Ren et al. Faster R-CNN: Towards real-time object detection with region proposal networks. NIPS 2015 RoI Pooling is not differentiable w.r.t box coordinates. Solutions: ● Alternate training ● Ignore gradient of classification branch w.r.t proposal coordinates ● Make pooling function differentiable
- 33. Faster R-CNN Ren et al. Faster R-CNN: Towards real-time object detection with region proposal networks. NIPS 2015 R-CNN Fast R-CNN Faster R-CNN Test time per image (with proposals) 50 seconds 2 seconds 0.2 seconds (Speedup) 1x 25x 250x mAP (VOC 2007) 66.0 66.9 66.9 Slide Credit: CS231n 33
- 34. Faster R-CNN 34 ● Faster R-CNN is the basis of the winners of COCO and ILSVRC 2015 object detection competitions. He et al. Deep residual learning for image recognition. CVPR 2016
- 35. YOLO: You Only Look Once 35Redmon et al. You Only Look Once: Unified, Real-Time Object Detection, CVPR 2016 Proposal-free object detection pipeline
- 36. YOLO: You Only Look Once Redmon et al. You Only Look Once: Unified, Real-Time Object Detection, CVPR 2016 36
- 37. YOLO: You Only Look Once 37 Each cell predicts: - For each bounding box: - 4 coordinates (x, y, w, h) - 1 confidence value - Some number of class probabilities For Pascal VOC: - 7x7 grid - 2 bounding boxes / cell - 20 classes 7 x 7 x (2 x 5 + 20) = 7 x 7 x 30 tensor = 1470 outputs
- 38. YOLO: Training 38Slide credit: YOLO Presentation @ CVPR 2016 For training, each ground truth bounding box is matched into the right cell
- 39. YOLO: Training 39Slide credit: YOLO Presentation @ CVPR 2016 For training, each ground truth bounding box is matched into the right cell
- 40. YOLO: Training 40Slide credit: YOLO Presentation @ CVPR 2016 Optimize class prediction in that cell: dog: 1, cat: 0, bike: 0, ...
- 41. YOLO: Training 41Slide credit: YOLO Presentation @ CVPR 2016 Predicted boxes for this cell
- 42. YOLO: Training 42Slide credit: YOLO Presentation @ CVPR 2016 Find the best one wrt ground truth bounding box, optimize it (i.e. adjust its coordinates to be closer to the ground truth’s coordinates)
- 43. YOLO: Training 43Slide credit: YOLO Presentation @ CVPR 2016 Increase matched box’s confidence, decrease non-matched boxes confidence
- 44. YOLO: Training 44Slide credit: YOLO Presentation @ CVPR 2016 Increase matched box’s confidence, decrease non-matched boxes confidence
- 45. YOLO: Training 45Slide credit: YOLO Presentation @ CVPR 2016 For cells with no ground truth detections, confidences of all predicted boxes are decreased
- 46. YOLO: Training 46Slide credit: YOLO Presentation @ CVPR 2016 For cells with no ground truth detections: ● Confidences of all predicted boxes are decreased ● Class probabilities are not adjusted
- 47. YOLO: Training, formally 47Slide credit: YOLO Presentation @ CVPR 2016 Bounding box coordinate regression Bounding box score prediction Class score prediction = 1 if box j and cell i are matched together, 0 otherwise = 1 if box j and cell i are NOT matched together = 1 if cell i has an object present
- 48. YOLO: You Only Look Once Redmon et al. You Only Look Once: Unified, Real-Time Object Detection, CVPR 2016 48 Dog Bicycle Car Dining Table Predict class probability for each cell (conditioned on object P(car | object) )
- 49. YOLO: You Only Look Once Redmon et al. You Only Look Once: Unified, Real-Time Object Detection, CVPR 2016 49 + NMS + Score threshold
- 50. SSD: Single Shot MultiBox Detector Liu et al. SSD: Single Shot MultiBox Detector, ECCV 2016 50 Same idea as YOLO, + several predictors at different stages in the network
- 51. SSD: Single Shot MultiBox Detector Liu et al. SSD: Single Shot MultiBox Detector, ECCV 2016 51 Similarly to Faster R-CNN, it uses box anchors to predict box coordinates as displacements
- 52. YOLOv2 52 Redmon & Farhadi. YOLO900: Better, Faster, Stronger. CVPR 2017
- 53. YOLOv2 53 Results on Pascal VOC 2007
- 54. YOLOv2 54 Results on COCO test-dev 2015
- 55. Summary 55 Proposal-based methods ● R-CNN ● Fast R-CNN ● Faster R-CNN ● SPPnet ● R-FCN Proposal-free methods ● YOLO, YOLOv2 ● SSD
- 56. Questions ?
- 57. A note on NMS 57 Tradeoff between recall/precision 0.8 0.6 0.7 Objectness scores
- 58. Soft NMS 58 Bodla, Singh et al. Improving Object Detection With One Line of Code. arXiv Apr 2017 Decay detection scores of contiguous objects instead of setting them to 0
- 59. Avoid NMS: Sequential box prediction 59 Stewart et al. End-To-End People Detection in Crowded Scenes. CVPR 2016 Predict boxes one after the other and learn when to stop