



























operating system for computer engineering ch3.ppt
- 2. 3.1 Process Concept Early operating systems allowed only one program to be executed at a time. This program had complete control of the system. Current-day OS allow multiple programs to be loaded and executed concurrently with the CPU(CPUs) multiplexed among them. Textbook uses the terms job and process almost interchangeably Process – is a program in execution; it is more than program code (called text section). A process includes the current activity represented by the value of: program counter Processor’s registers Stack, which contains temporary data( such as function parameters, return addresses and local variables) data section which contains global variables Heap which is memory that is dynamically allocated during process run time. A program by itself is not a process; it is a passive entity such as a file containing a list of instructions stored on disk (often called executable file), whereas a process is an active entity. A program becomes a process when an executable file is loaded into memory either by double-clicking the program’s icon or entering the name of the executable file on the CLI.
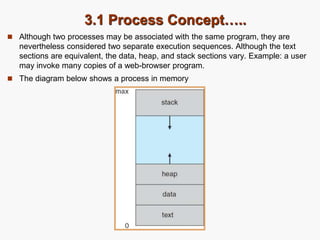
- 3. 3.1 Process Concept….. Although two processes may be associated with the same program, they are nevertheless considered two separate execution sequences. Although the text sections are equivalent, the data, heap, and stack sections vary. Example: a user may invoke many copies of a web-browser program. The diagram below shows a process in memory
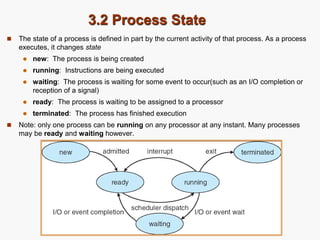
- 4. 3.2 Process State The state of a process is defined in part by the current activity of that process. As a process executes, it changes state new: The process is being created running: Instructions are being executed waiting: The process is waiting for some event to occur(such as an I/O completion or reception of a signal) ready: The process is waiting to be assigned to a processor terminated: The process has finished execution Note: only one process can be running on any processor at any instant. Many processes may be ready and waiting however.
- 5. 3.3 Process Control Block (PCB) Each process is represented in the OS by PCB also called task control block. Information associated with each process are: Process state: new, ready, running, waiting, halted… Program counter(PC): indicates the address of the next instruction to be executed for this process. CPU registers: along with PC, this state information must be saved when an interrupt occurs to allow the process be continued correctly afterward. CPU scheduling information: includes process priority, pointers to scheduling queues and other scheduling parameters. Memory-management information: includes the value of base and limit registers, page tables/segment tables and so on. Accounting information: includes amount of CPU and real time used, time limits, account numbers, process numbers etc. I/O status information: includes the list of I/O devices allocated to the process, a list of open files and so on.
- 6. CPU Switch From Process to Process
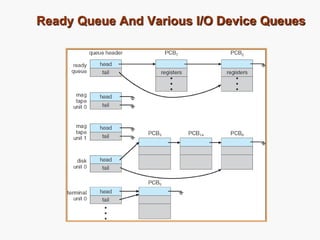
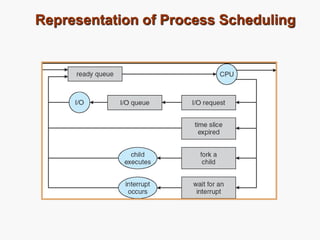
- 7. 3.4 Process Scheduling The objective of multiprogramming is to have some processes running at all times, to maximize CPU utilization. The objective of time sharing is to switch the CPU among processes so frequently that users can interact with each program while it is running. Scheduling Queues Job queue – set of all processes in the system Ready queue – list of all processes residing in main memory, ready and waiting to execute Device queues – list of processes waiting for an I/O device Processes migrate among the various queues
- 8. Ready Queue And Various I/O Device Queues
- 9. Representation of Process Scheduling
- 10. 3.5 Schedulers Long-term scheduler (or job scheduler) – selects which processes should be brought into the memory(ready queue). Short-term scheduler (or CPU scheduler) – selects from among the processes that are ready to execute and allocates CPU to one of them Difference between these two schedulers lies in frequency of execution Short-term scheduler is invoked very frequently (milliseconds) (must be fast) Long-term scheduler is invoked very infrequently (seconds, minutes) (may be slow) The long-term scheduler controls the degree of multiprogramming (the number of processes in memory) Processes can be described as either: I/O-bound process – spends more time doing I/O than computations, many short CPU bursts CPU-bound process – spends more time doing computations; few very long CPU bursts
- 11. Addition of Medium Term Scheduling
- 12. Context Switch Interrupts cause the OS to change a CPU from its current task and to run a kernel routine. The system must save the state of the process currently running and load the saved state (state restore) for the new process. Context-switch time is overhead because the system does no useful work while switching Context-switch times are dependent on hardware support. Example: the set of registers in the system.
- 13. 3.6 Operations on Processes 3.6.1 Process Creation Parent process create children processes, which, in turn create other processes, forming a tree of processes To accomplish its tasks, a process will need certain resources which it will obtain directly from OS or parent process. Resource sharing Parent and children share all resources Children share subset of parent’s resources Parent and child share no resources Restricting a child process to a subset of the parent’s resources prevents any process from overloading the system by creating too many sub processes. Two possibilities in terms of execution Parent and children execute concurrently Parent waits until children terminate Two possibilities in terms of address space Child duplicate of parent(it has the same program and data as the parent) Child has a program loaded into it
- 14. Process Creation (Cont.) UNIX examples fork system call creates new process exec system call used after a fork to replace the process’ memory space with a new program
- 15. A tree of processes on a typical Solaris
- 16. 3.6.2 Process Termination A process terminates when it finishes its last statement and asks the operating system to delete it (by using the exit() system call). The process may return a status value to its parent process (via wait() system call). Process’ resources are deallocated by operating system Parent may terminate execution of its children processes using appropriate system call (abort) for various reasons such as : Child has exceeded allocated resources Task assigned to child is no longer required If parent is exiting Some operating system do not allow child to continue if its parent terminates – All children terminated - cascading termination
- 17. 3.7 Cooperating Processes Independent process cannot affect or be affected by the execution of another process(does not share data with any other process). Cooperating process can affect or be affected by the execution of another process(shares data with other process) Advantages of process cooperation Information sharing: several users may need same information Computation speed-up: enables parallel execution Modularity Convenience Cooperating processes require an inter process communication (IPC) mechanism to exchange data and information. Two models of IPC are Shared memory Message passing
- 18. 3.7.1 Shared Memory Processes can exchange information by reading and writing data to a shared memory region established by the cooperating processes. A shared memory region resides in the address space of the process creating it. The other processes that wish to communicate attach it to their address space. Allows maximum speed and convenience of communication as it can be done at memory speeds when within a computer. System calls are required only to establish shared memory regions and no assistance from the kernel is required to access the shared memory. Producer-consumer problem: paradigm for cooperating processes, producer process produces information that is consumed by a consumer process. One solution is to use buffer unbounded-buffer places no practical limit on the size of the buffer bounded-buffer assumes that there is a fixed buffer size
- 19. Communications Models Fig. IPC a) message passing b) shared-memory
- 20. 3.7.2 Message Passing Communication takes place by means of messages exchanged between the cooperating processes. Example : a chat program used on WWW Useful for exchanging smaller amount of data Easier to implement than shared-memory for inter computer communication Typically implemented using system calls and thus require more time-consuming task of OS intervention. Message-passing facility provides two operations: send(message) – message size can be either fixed or variable receive(message) If P and Q wish to communicate, they need to: establish a communication link between them exchange messages via send/receive Implementation of logical communication link physical (e.g., shared memory, hardware bus) logical (e.g., logical properties)
- 21. Implementation Questions How are links established? Can a link be associated with more than two processes? How many links can there be between every pair of communicating processes? What is the capacity of a link? Is the size of a message that the link can accommodate fixed or variable? Is a link unidirectional or bi-directional?
- 22. 3.7.2.1 Direct Communication Processes must name each other explicitly: the send() and receive() primitives are defined as send (P, message) – send a message to process P receive(Q, message) – receive a message from process Q Properties of communication link Links are established automatically A link is associated with exactly one pair of communicating processes Between each pair there exists exactly one link The link may be unidirectional, but is usually bi-directional
- 23. 3.7.2.2 Indirect Communication Messages are sent to and received from mailboxes (also referred to as ports) Each mailbox has a unique id Processes can communicate only if they share a mailbox Primitives are defined as send (A, message) – send a message to mailbox A receive(A, message) – receive a message from mailbox A Properties of communication link Link established only if processes share a common mailbox A link may be associated with more than two processes Each pair of processes may share several communication links Link may be unidirectional or bi-directional
- 24. 3.7.2.2 Indirect Communication…….. Mailbox sharing Suppose processes P1, P2, and P3 share mailbox A and P1, sends message to A. which process will receive the message? Solutions depends on Allow a link to be associated with at most two processes Allow only one process at a time to execute a receive operation Allow the system to select arbitrarily one receiver, not both. Sender is notified who the receiver was. A mailbox may be owned by a process or by OS OS must provide operations to create a new mailbox send and receive messages through mailbox destroy a mailbox When a process that owns a mailbox terminates, the mailbox disappears. A mailbox owned by OS has an existence of its own.
- 25. 3.7.2.3 Synchronization Message passing may be either blocking or non-blocking Blocking is considered synchronous Blocking send has the sender block until the message is received by process or mailbox. Blocking receive has the receiver block until a message is available Non-blocking is considered asynchronous Non-blocking send has the sender send the message and continue Non-blocking receive has the receiver receive a valid message or null
- 26. 3.7.2.4 Buffering Queue of messages attached to the link to temporarily store messages; implemented in one of three ways 1. Zero capacity – queue has zero length thus the link cannot have any messages waiting in it. Sender must wait for receiver. 2. Bounded capacity – queue has finite length of n messages. Sender must wait if link full 3. Unbounded capacity – potentially infinite length queue. Sender never waits.
- 27. Client-Server Communication Sockets Remote Procedure Calls Remote Method Invocation (Java)
- 28. Sockets A socket is defined as an endpoint for communication Concatenation of IP address and port The socket 161.25.19.8:1625 refers to port 1625 on host 161.25.19.8 Communication consists between a pair of sockets
- 30. Remote Procedure Calls Remote procedure call (RPC) abstracts procedure calls between processes on networked systems. Stubs – client-side proxy for the actual procedure on the server. The client-side stub locates the server and marshalls the parameters. The server-side stub receives this message, unpacks the marshalled parameters, and peforms the procedure on the server.
- 31. Execution of RPC
- 32. Remote Method Invocation Remote Method Invocation (RMI) is a Java mechanism similar to RPCs. RMI allows a Java program on one machine to invoke a method on a remote object.
- 34. End of Chapter 3