Osmium MIMU4444: Massive Multi-IMU Array
0 likes•683 views

The document discusses the Osmium MIMU4444, a massive inertial sensor array module featuring 32 low-cost inertial measurement units (IMUs) designed for high precision motion sensing. It highlights the advantages of sensor fusion and array signal processing methods, enabling enhanced measurement performance and reliability for applications such as gait analysis and autonomous robotics. The platform is open-source and configurable, allowing users to implement custom algorithms and processes.
![With the developments in Micro-Electrical-Mechanical-System (MEMS) fabrication technology,
miniaturization, cost reduction, and low power implementation of the inertial measurement units (IMU) have
become possible. This enables a new approach of realizing high precision sensor systems, which demand
performance better than what is offered by a single low cost sensor, by fusing the measurements of multiple such
low cost sensors. This approach results in enhanced measurement performance, reliability and integrity of the
overall sensor system. Advantages of multi IMU (MIMU) systems are described in [1].
The Osmium MIMU4444, with an array of on-board 32 IMUs, is a massive Multi-IMU (MIMU) inertial sensor
array module with on-board 32-bits floating point processing capability. The IMUs’ placement scheme, with
their sensitivity axes in the opposite directions, mitigates effect of systematic errors. The module is supported by
an open source embedded code written in C, which is easily configurable to run any user implemented
algorithm. The software is configurable to work as a standalone ZUPT-aided inertial navigation system and as a
displacement & heading change sensor. MATLAB code is also available for communication.
The main merits of Osmium MIMU4444 are the placement of IMUs in two mirrored 4x4 square arrays, the
ability to sample data from all IMUs in parallel and the on-board floating point processing capability. These
features and capabilities make MIMU4444 an ideal platform for carrying out research in motion sensing by
using Sensor Fusion and Array Signal Processing methods. MIMU4444 is an easy to use and highly configurable
hardware platform, serves the needs for niche applications, such as gait analysis, 3D motion capture, Structure
from Motion (SfM), autonomous robotics etc.
[1] Isaac Skog, John-Olof Nilsson and Peter Händel, “An Open-source Multi Inertial Measurement Unit (MIMU)
Platform”, in In Proc. 2014 IEEE ISISS, Laguna Beach, CA, USA, 25–26 Feb, 2014.
Feature summary:
• Massive 32 IMUs array: Two 4x4 arrays of nine-Axis
IMUs (Gyro + Accelero + Magnetometer)
• Processing using AT32UC3C 32-bits floating point
microcontroller with 512 Kb internal flash memory
• Parallel communication with 32 IMUs using 32 parallel
s/w I2C buses
• USB 2.0 communication through USB micro-B
connector
• Access to all the sensors’ data through USB
• IMUs’ orientation to minimize systematic errors
• JTAG programming and debugging through a dedicated
USB micro-B connector
• LED indications for power-up and general purpose
• Open source firmware to work as a standalone ZUPT-
aided INS
• Easily configurable firmware to run any user
implemented algorithm
• Power option: USB
• Size: 49.3mm x 26.6mm
Osmium MIMU4444
A Massive Inertial Sensor Array Module
R&D Centre: GT Silicon Pvt Ltd, D-201, Type 1, VH Extension, IIT Kanpur, Kanpur (UP), India, PIN – 208016, Tel: +91 512 259 5333
Email: info@inertialelements.com; URL: http://www.inertialelements.com/](https://image.slidesharecdn.com/osmiummimu4444-141221040419-conversion-gate01/85/Osmium-MIMU4444-Massive-Multi-IMU-Array-1-320.jpg)
Osmium MIMU4444: Massive Multi-IMU Array
- 1. With the developments in Micro-Electrical-Mechanical-System (MEMS) fabrication technology, miniaturization, cost reduction, and low power implementation of the inertial measurement units (IMU) have become possible. This enables a new approach of realizing high precision sensor systems, which demand performance better than what is offered by a single low cost sensor, by fusing the measurements of multiple such low cost sensors. This approach results in enhanced measurement performance, reliability and integrity of the overall sensor system. Advantages of multi IMU (MIMU) systems are described in [1]. The Osmium MIMU4444, with an array of on-board 32 IMUs, is a massive Multi-IMU (MIMU) inertial sensor array module with on-board 32-bits floating point processing capability. The IMUs’ placement scheme, with their sensitivity axes in the opposite directions, mitigates effect of systematic errors. The module is supported by an open source embedded code written in C, which is easily configurable to run any user implemented algorithm. The software is configurable to work as a standalone ZUPT-aided inertial navigation system and as a displacement & heading change sensor. MATLAB code is also available for communication. The main merits of Osmium MIMU4444 are the placement of IMUs in two mirrored 4x4 square arrays, the ability to sample data from all IMUs in parallel and the on-board floating point processing capability. These features and capabilities make MIMU4444 an ideal platform for carrying out research in motion sensing by using Sensor Fusion and Array Signal Processing methods. MIMU4444 is an easy to use and highly configurable hardware platform, serves the needs for niche applications, such as gait analysis, 3D motion capture, Structure from Motion (SfM), autonomous robotics etc. [1] Isaac Skog, John-Olof Nilsson and Peter Händel, “An Open-source Multi Inertial Measurement Unit (MIMU) Platform”, in In Proc. 2014 IEEE ISISS, Laguna Beach, CA, USA, 25–26 Feb, 2014. Feature summary: • Massive 32 IMUs array: Two 4x4 arrays of nine-Axis IMUs (Gyro + Accelero + Magnetometer) • Processing using AT32UC3C 32-bits floating point microcontroller with 512 Kb internal flash memory • Parallel communication with 32 IMUs using 32 parallel s/w I2C buses • USB 2.0 communication through USB micro-B connector • Access to all the sensors’ data through USB • IMUs’ orientation to minimize systematic errors • JTAG programming and debugging through a dedicated USB micro-B connector • LED indications for power-up and general purpose • Open source firmware to work as a standalone ZUPT- aided INS • Easily configurable firmware to run any user implemented algorithm • Power option: USB • Size: 49.3mm x 26.6mm Osmium MIMU4444 A Massive Inertial Sensor Array Module R&D Centre: GT Silicon Pvt Ltd, D-201, Type 1, VH Extension, IIT Kanpur, Kanpur (UP), India, PIN – 208016, Tel: +91 512 259 5333 Email: [email protected]; URL: http://www.inertialelements.com/
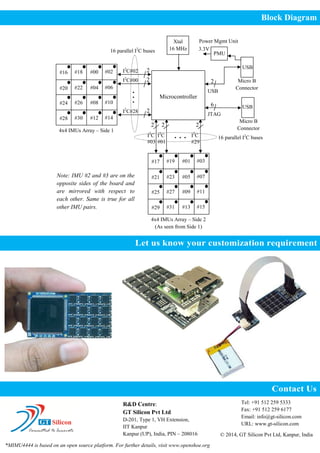
- 2. Microcontroller 2 6 4x4 IMUs Array – Side 1 PMU Xtal 16 MHz I2 C#02 USB JTAG Micro B Connector 3.3V USB Power Mgmt Unit USB Micro B Connector #16 #20 #24 #28 I2 C#00 I2 C#28 #00 #04 #08 #12 #02 #06 #10 #14 #18 #22 #26 #30 4x4 IMUs Array – Side 2 (As seen from Side 1) #17 #21 #25 #29 #01 #05 #09 #13 #03 #07 #11 #15 #19 #23 #27 #31 I2 C #03 2 2 . . . 2 2 2 2 I2 C #01 I2 C #29 . . . Note: IMU #2 and #3 are on the opposite sides of the board and are mirrored with respect to each other. Same is true for all other IMU pairs. 16 parallel I2 C buses 16 parallel I2 C buses Block Diagram Let us know your customization requirement Contact Us R&D Centre: GT Silicon Pvt Ltd D-201, Type 1, VH Extension, IIT Kanpur Kanpur (UP), India, PIN – 208016 Tel: +91 512 259 5333 Fax: +91 512 259 6177 Email: [email protected] URL: www.inertialelements.com © 2015, GT Silicon Pvt Ltd, Kanpur, India *MIMU4444 is based on an open source platform. For further details, visit www.openshoe.org