
![Q-Measure Concept Fuzzy Measure Axioms Let be non-intersecting sets Boundary conditions: Monotonicity: Continuity: guaranteed for discrete spaces Probability Measure (1933) replaces monotonicity by additivity: Sugeno -Measure (1975) adds one more axiom: for a unique that satisfies g(X)=1 Q-Measure Extensions (2003) for any choice of > -1, !=0, define: where f i [0,1] are density generators Convergence Behavior of Q-Measures](https://image.slidesharecdn.com/q-metrics-in-theory-and-practice-100123111819-phpapp01/85/Q-Metrics-in-Theory-And-Practice-2-320.jpg)


![Case Studies CDMA Data Filtering for Cognitive Radio Existing Linear Filter (Target) 63 coefficients Q-Filter Solution - 7 coefficients Solution Comparison Performance Comparison Linear Filter Equalization RMS = 20.54 Correlation = 99.52% RMS=20.49 Correlation = 99.55% Imaginary RMS = 31.25 Correlation = 99.11% RMS = 31.31 Correlation = 99.14% Real Testing [200,000 samples] Training [065,504 samples]](https://image.slidesharecdn.com/q-metrics-in-theory-and-practice-100123111819-phpapp01/85/Q-Metrics-in-Theory-And-Practice-5-320.jpg)
![Q-Metric Concept Metric Axioms A function d(x,y) defined for x and y in a set X is a metric provided that: d(x,y) > 0, and d(x,y) = 0 iff x=y d(x,y) = d(y,x) d(x,y) + d(y,z) > d(x,z) The pair (X,d) is called a Metric Space P-Metrics, d p (x,y) Defined, for 1 < p < infinity, by: d p (x,y) = [ sum { |x i -y i | p } ] (1/p) Manhattan (Taxi-Cab) Distance, d t (x,y) Same as p-metric with p=1 Euclidean Distance, d e (x,y) Same as p-metric with p=2 Mahalanobis Distance, d m (x,y) Defined using covariance matrix A, by: d m (x,y) = (x-y)’ A -1 (x-y) Q-Metrics Definition, d (x,y) For x ,y X=[0,1] n and [-1,0) define: We call the pair (X, d ) a Q-Metric Space Graph of d(x,y)=1 in 2-D Space d =-1 = 1 d =0 = 1 d -1,0) = 1 d e = d p=2 = 1 Dimension1 Dimension2 d t = d p=1 = 1 d p=infinity = 1 x =(x 1 ,x 2 ) y =(y 1 ,y 2 )](https://image.slidesharecdn.com/q-metrics-in-theory-and-practice-100123111819-phpapp01/85/Q-Metrics-in-Theory-And-Practice-6-320.jpg)

![Q-Aggregates Concept the math behind the effect Aggregation Operator Axioms A function h: [0,1] n -> [0,1], n > 2, is an aggregation operator provided that: h(0, 0, …, 0) = 0 h(1, 1, …, 1) = 1 h is monotonic non-decreasing in all its arguments h is continuous h is symmetric in all its arguments Generalized Means Defined, for -infinity < < infinity, by: h (a 1 , …, a n ) = [ (a 1 + … + a n ) / n ] (1/ ) Q-Aggregate Definition For a i [0,1], n > 2, & define: EXISTING NOVEL](https://image.slidesharecdn.com/q-metrics-in-theory-and-practice-100123111819-phpapp01/85/Q-Metrics-in-Theory-And-Practice-8-320.jpg)









Q-Metrics in Theory And Practice
- 1. Q-Metrics in Theory and Practice PRESENTATION TO UNIVERSITY OF FLORIDA – LOUISVILLE, FL 2009:11:10 d =-1 = 1 d =0 = 1 d -1,0) = 1 d e = d p=2 = 1 Dimension1 Dimension2 d t = d p=1 = 1 d p=infinity = 1 x =(x 1 ,x 2 ) y =(y 1 ,y 2 ) Q-Metrics for Different Lambda Values Graph of d( x , y )=1 in 2-Dimensional Space
- 2. Q-Measure Concept Fuzzy Measure Axioms Let be non-intersecting sets Boundary conditions: Monotonicity: Continuity: guaranteed for discrete spaces Probability Measure (1933) replaces monotonicity by additivity: Sugeno -Measure (1975) adds one more axiom: for a unique that satisfies g(X)=1 Q-Measure Extensions (2003) for any choice of > -1, !=0, define: where f i [0,1] are density generators Convergence Behavior of Q-Measures
- 3. Q-Measures in a nutshell q-measures provide more expressive and computationally attractive nonlinear models for uncertainty management when modeling a complex system, it’s an oversimplification to assume that the interdependency among information sources is linear X x 2 x 3 x 4 A x 1 x 6 x 5 x 7 x 8 x 9 B=A c q(A) q(A c ) =0 probability >0 plausibility <0 belief
- 4. Q-filter Computations N=5 Tap Case - Nonlinearity, Adaptivity, and Model Capacity h 5 <h 2 < h 1 <h 3 < h 4 h 4 x 1 x 2 x 3 x 4 x 5 f 1 f 2 f 3 f 4 f 5 Window Slots Signal Value h 1 h 2 h 3 h 5 Density Generators i h 5 h 2 h 1 h 3 h 4 Threshold Nonlinearity Controller h(x i ) q(A ) q({x 4 }) q({x 4 , x 3 }) q({x 4 , x 3 , x 1 }) q({x 4 , x 3 , x 1 , x 2 }) q({x 4 , x 3 , x 1 , x 2 , x 5 })=1.0 Case Adaptive Weight A q( )=0.0 Total area is the Q-filter output value
- 5. Case Studies CDMA Data Filtering for Cognitive Radio Existing Linear Filter (Target) 63 coefficients Q-Filter Solution - 7 coefficients Solution Comparison Performance Comparison Linear Filter Equalization RMS = 20.54 Correlation = 99.52% RMS=20.49 Correlation = 99.55% Imaginary RMS = 31.25 Correlation = 99.11% RMS = 31.31 Correlation = 99.14% Real Testing [200,000 samples] Training [065,504 samples]
- 6. Q-Metric Concept Metric Axioms A function d(x,y) defined for x and y in a set X is a metric provided that: d(x,y) > 0, and d(x,y) = 0 iff x=y d(x,y) = d(y,x) d(x,y) + d(y,z) > d(x,z) The pair (X,d) is called a Metric Space P-Metrics, d p (x,y) Defined, for 1 < p < infinity, by: d p (x,y) = [ sum { |x i -y i | p } ] (1/p) Manhattan (Taxi-Cab) Distance, d t (x,y) Same as p-metric with p=1 Euclidean Distance, d e (x,y) Same as p-metric with p=2 Mahalanobis Distance, d m (x,y) Defined using covariance matrix A, by: d m (x,y) = (x-y)’ A -1 (x-y) Q-Metrics Definition, d (x,y) For x ,y X=[0,1] n and [-1,0) define: We call the pair (X, d ) a Q-Metric Space Graph of d(x,y)=1 in 2-D Space d =-1 = 1 d =0 = 1 d -1,0) = 1 d e = d p=2 = 1 Dimension1 Dimension2 d t = d p=1 = 1 d p=infinity = 1 x =(x 1 ,x 2 ) y =(y 1 ,y 2 )
- 7. Q-Metric Based SVM Nonlinear Classification and Regression Cases Novel QMB-SVC Novel QMB-SVR Conventional RBF-SVC Conventional RBF-SVR
- 8. Q-Aggregates Concept the math behind the effect Aggregation Operator Axioms A function h: [0,1] n -> [0,1], n > 2, is an aggregation operator provided that: h(0, 0, …, 0) = 0 h(1, 1, …, 1) = 1 h is monotonic non-decreasing in all its arguments h is continuous h is symmetric in all its arguments Generalized Means Defined, for -infinity < < infinity, by: h (a 1 , …, a n ) = [ (a 1 + … + a n ) / n ] (1/ ) Q-Aggregate Definition For a i [0,1], n > 2, & define: EXISTING NOVEL
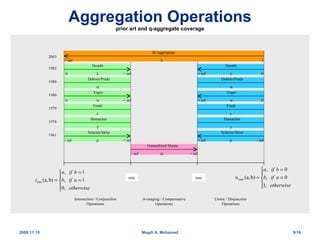
- 9. Aggregation Operations prior art and q-aggregate coverage Intersection / Conjunction Operations Averaging / Compensative Operations Union / Disjunction Operations Generalized Means Scheize/Sklar Scheize/Sklar Hamacher Hamacher Frank Frank Yager Yager Dubois/Prade Dubois/Prade Dombi Dombi p p s s w w Q-Aggregates - 1 + inf 2003 1982 1980 1980 1979 1978 1961 - inf + inf - inf + inf + inf - inf + inf + inf + inf + inf 0 0 0 0 min max
- 10. QFS Supervised Learning for EKG case study S - Q Q RMS=0.128 S Q Q Q Q - RMS=0.032 A A S Q Q Q RMS=0.044 -
- 11. Conventional RBF Networks Regression: Classification: where x input vector c cluster center d() distance function w output weights m number of hidden nodes j class label index where x input vector c cluster center d() distance function f output weights m number of hidden nodes Notes : Distance functions, d(*,*) , i.e., Metrics, serve key role in RBF neural networks. Exponential function e(-x) is a reversal operator. Exponential function e(*) is computationally expensive and costly, typically in hardware implementation. Output of RBF network is weighted averaging.
- 12. Weighted Q-Metrics Recursive Weighted Q-Metrics Calculation Algorithm:
- 13. Weighted Q-Aggregate Recursive Weighted Q-Aggregate Calculation Algorithm:
- 14. Logical Negation & Veracity Functions Negation operator can behave similar to e(-x) . Veracity operator can behave as a transform from x to e(-x). Computationally efficient since it only requires accumulations, multiplications and a division. No exponential function calculation. Sugeno Negation Operator: Veracity Operator:
- 15. The New Q-RBF Neural Networks Notes: Use more powerful metrics different from a fixed Lp or other classical type of metrics. Use better aggregation operation in classification problem than simple linear weighted averaging. Negation and veracity functions are more computationally attractive, with low-cost than e(-x), suitable for hardware implementations, particularly in embedded platforms. Regression: Classification:
- 16. Case Studies Regression : RF Positioning Classification : Driver Maneuver 2x4x1 neural network Q-RBF RMS = 0.077 BP RMS = 0.110 Q-RBF confusion matrix BP confusion matrix 5x3x2 neural network Q-RBF clearly has better classification results than BP. 2628 223 2 482 2613 1 2 1 2720 131 2 1076 2019 1 2 1
- 17. Q-Aggregates: Union / Average DOMAINS
- 18. Q-Aggregates: Intersection / Average DOMAINS