Signal Processing Course : Theory for Sparse Recovery
3 likes2,458 views

The document discusses sparse signal recovery from compressed measurements. It begins by presenting an example inverse problem where the goal is to recover a sparse signal f0 from noisy measurements y using regularization. It then introduces the sparse recovery problem of finding the sparsest x that solves y=Kx. The document discusses various properties of sparse regularization approaches including local behavior, robustness to noise, and compressed sensing theory based on the restricted isometry property.















![Polytope Noiseless Recovery
Counting faces of random polytopes: [Donoho]
All x0 such that ||x0 ||0 Call (P/N )P are identifiable.
Most x0 such that ||x0 ||0 Cmost (P/N )P are identifiable.
1
Call (1/4) 0.065 0.9
0.8
Cmost (1/4) 0.25 0.7
0.6
0.5
Sharp constants. 0.4
0.3
No noise robustness. 0.2
0.1
0
50 100 150 200 250 300 350 400
RIP All Most](https://image.slidesharecdn.com/course-signal-recovery-l1-121213053740-phpapp02/85/Signal-Processing-Course-Theory-for-Sparse-Recovery-16-320.jpg)

























![Robustness to Small Noise
Identifiability crition: [Fuchs]
For s ⇥ { 1, 0, +1}N , let I = supp(s)
+,
F(s) = || I sI || where ⇥I = Ic I
( I is assumed to have full rank)
+
I =( I I)
1
I satisfies +
I I = IdI](https://image.slidesharecdn.com/course-signal-recovery-l1-121213053740-phpapp02/85/Signal-Processing-Course-Theory-for-Sparse-Recovery-43-320.jpg)
![Robustness to Small Noise
Identifiability crition: [Fuchs]
For s ⇥ { 1, 0, +1}N , let I = supp(s)
+,
F(s) = || I sI || where ⇥I = Ic I
( I is assumed to have full rank)
+
I =( I I)
1
I satisfies +
I I = IdI
Theorem: If F (sign(x0 )) < 1, T = min |x0,i |
i I
If ||w||/T is small enough and ||w||, then
x0 + +
I w ( I I)
1
sign(x0,I )
is the unique solution of P (y).
⇥ If ||w|| small enough, ||x x0 || = O(||w||).](https://image.slidesharecdn.com/course-signal-recovery-l1-121213053740-phpapp02/85/Signal-Processing-Course-Theory-for-Sparse-Recovery-44-320.jpg)










![Robustness to Bounded Noise
Exact Recovery Criterion (ERC): [Tropp]
For a support I ⇥ {0, . . . , N 1} with I full rank,
ERC(I) = || I || , where ⇥I = Ic
+,
I
= || +
I Ic ||1,1 = max ||
c
+
I j ||1
j I
(use ||(aj )j ||1,1 = maxj ||aj ||1 )
Relation with F criterion: ERC(I) = max F(s)
s,supp(s) I](https://image.slidesharecdn.com/course-signal-recovery-l1-121213053740-phpapp02/85/Signal-Processing-Course-Theory-for-Sparse-Recovery-55-320.jpg)
![Robustness to Bounded Noise
Exact Recovery Criterion (ERC): [Tropp]
For a support I ⇥ {0, . . . , N 1} with I full rank,
ERC(I) = || I || , where ⇥I = Ic
+,
I
= || +
I Ic ||1,1 = max ||
c
+
I j ||1
j I
(use ||(aj )j ||1,1 = maxj ||aj ||1 )
Relation with F criterion: ERC(I) = max F(s)
s,supp(s) I
Theorem: If ERC(supp(x0 )) < 1 and ||w||, then
x is unique, satisfies supp(x ) supp(x0 ), and
||x0 x || = O(||w||)](https://image.slidesharecdn.com/course-signal-recovery-l1-121213053740-phpapp02/85/Signal-Processing-Course-Theory-for-Sparse-Recovery-56-320.jpg)




![Weak ERC
For A = (ai )i , B = (bi )i , where ai , bi RP ,
(A, B) = max | ai , bj ⇥|
j
i I
(A) = max | ai , aj ⇥|
j
i=j
Weak Exact Recovery Criterion: [Gribonval,Dossal]
Denoting = ( i )N 1 where
i=0 i RP
( I, Ic )
if ( I) <1
w-ERC(I) = 1 ( I)
+ otherwise.
Theorem: F(s) ERC(I) w-ERC(I) (for I = supp(s))](https://image.slidesharecdn.com/course-signal-recovery-l1-121213053740-phpapp02/85/Signal-Processing-Course-Theory-for-Sparse-Recovery-61-320.jpg)






![Coherence - Examples
Incoherent pair of orthobases: Diracs/Fourier
2i
1 = {k ⇤⇥ [k m]}m 2 = k N 1/2
e N mk
m
=[ 1, 2] RN 2N](https://image.slidesharecdn.com/course-signal-recovery-l1-121213053740-phpapp02/85/Signal-Processing-Course-Theory-for-Sparse-Recovery-69-320.jpg)
![Coherence - Examples
Incoherent pair of orthobases: Diracs/Fourier
2i
1 = {k ⇤⇥ [k m]}m 2 = k N 1/2
e N mk
m
=[ 1, 2] RN 2N
1
min ||y x||2 + ||x||1
x R2N 2
1
min ||y 1 x1 2 x2 ||2 + ||x1 ||1 + ||x2 ||1
x1 ,x2 RN 2
= +](https://image.slidesharecdn.com/course-signal-recovery-l1-121213053740-phpapp02/85/Signal-Processing-Course-Theory-for-Sparse-Recovery-70-320.jpg)
![Coherence - Examples
Incoherent pair of orthobases: Diracs/Fourier
2i
1 = {k ⇤⇥ [k m]}m 2 = k N 1/2
e N mk
m
=[ 1, 2] RN 2N
1
min ||y x||2 + ||x||1
x R2N 2
1
min ||y 1 x1 2 x2 ||2 + ||x1 ||1 + ||x2 ||1
x1 ,x2 RN 2
= +
1
µ( ) = = separates up to N /2 Diracs + sines.
N](https://image.slidesharecdn.com/course-signal-recovery-l1-121213053740-phpapp02/85/Signal-Processing-Course-Theory-for-Sparse-Recovery-71-320.jpg)


![CS with RIP
1
recovery:
y = x0 + w
x⇥
argmin ||x||1 where
|| x y|| ||w||
1
⇥ argmin || x y||2 + ||x||1
x 2
Restricted Isometry Constants:
⇥ ||x||0 k, (1 k )||x||2 || x||2 (1 + k )||x||2
Theorem: If 2k 2 1, then [Candes 2009]
C0
||x0 x || ⇥ ||x0 xk ||1 + C1
k
where xk is the best k-term approximation of x0 .](https://image.slidesharecdn.com/course-signal-recovery-l1-121213053740-phpapp02/85/Signal-Processing-Course-Theory-for-Sparse-Recovery-74-320.jpg)

![Singular Values Distributions
Eigenvalues of I I with |I| = k are essentially in [a, b]
a = (1 )2 and b = (1 )2 where = k/P
When k = P + , the eigenvalue distribution tends to
1
f (⇥) = (⇥ b)+ (a ⇥)+ [Marcenko-Pastur]
1.5
2⇤ ⇥ P=200, k=10
P=200, k=10
f ( )
1.5
1
1
0.5
P = 200, k = 10
0.5
0
0 0.5 1 1.5 2 2.5
0
0 0.5 1 P=200, k=30 1.5 2 2.5
1
P=200, k=30
0.8
1
0.6
0.8
0.4
k = 30
0.6
0.2
0.4
0
0.2
0 0.5 1 1.5 2 2.5
0
0 0.5 1 P=200, k=50 1.5 2 2.5
P=200, k=50
0.8
0.8
0.6
0.6
0.4
Large deviation inequality [Ledoux]
0.4
0.2](https://image.slidesharecdn.com/course-signal-recovery-l1-121213053740-phpapp02/85/Signal-Processing-Course-Theory-for-Sparse-Recovery-76-320.jpg)








Signal Processing Course : Theory for Sparse Recovery
- 1. 1 Sparse Recovery Gabriel Peyré www.numerical-tours.com
- 2. 1 Example: Regularization Inverse problem: measurements y = Kf0 + w f0 Kf0 K K : RN0 RP , P N0
- 3. 1 Example: Regularization Inverse problem: measurements y = Kf0 + w f0 Kf0 K K : RN0 RP , P N0 Model: f0 = x0 sparse in dictionary RN0 N ,N N0 . x0 RN f0 = x0 R N0 K y = Kf0 + w RP coe cients image w observations = K ⇥ ⇥ RP N
- 4. 1 Example: Regularization Inverse problem: measurements y = Kf0 + w f0 Kf0 K K : RN0 RP , P N0 Model: f0 = x0 sparse in dictionary RN0 N ,N N0 . x0 RN f0 = x0 R N0 K y = Kf0 + w RP coe cients image w observations = K ⇥ ⇥ RP N Sparse recovery: f = x where x solves 1 min ||y x||2 + ||x||1 x RN 2 Fidelity Regularization
- 5. Variations and Stability Data: f0 = x0 Observations: y = x0 + w 1 Recovery: x ⇥ argmin || x y||2 + ||x||1 (P (y)) x RN 2
- 6. Variations and Stability Data: f0 = x0 Observations: y = x0 + w 1 Recovery: x ⇥ argmin || x y||2 + ||x||1 (P (y)) 0+ x RN 2 x argmin ||x||1 (no noise) (P0 (y)) x=y
- 7. Variations and Stability Data: f0 = x0 Observations: y = x0 + w 1 Recovery: x ⇥ argmin || x y||2 + ||x||1 (P (y)) 0+ x RN 2 x argmin ||x||1 (no noise) (P0 (y)) x=y Questions: – Behavior of x with respect to y and . – Criterion to ensure x = x0 when w = 0 and = 0+ . – Criterion to ensure ||x x0 || = O(||w||).
- 8. Numerical Illustration s=3 s=3 s=6 s=6 0.5 0.5 y = s=3 0 + w, ||x0 ||0 =0.5 x s=3 s, 2 R50⇥200 s=6 0.5 s=6 Gaussian. 0 0 s=3 s=6 0 0 0.5 0.5 0.5 0.5 −0.5 −0.5 −0.5 −0.5 0 0 0 0 −1 −1 −0.5 10 −0.5 20 10 30 20 40 30 50 40 60 50 60 −0.5 10 −0.5 2010 3020 4030 5040 6050 60 −1 −1 s=13 s=13 s=25 s=25 10 20 10 30 20 40 30 50 40 60 50 60 10 2010 3020 4030 5040 6050 60 1 1 s = 13 1.5 1.5 s = 25 s=13 s=13 1 1 s=25 s=25 0.5 0.5 1 1 0.5 0.5 1.5 1.5 0 0 0 0 1 1 0.5 0.5 −0.5 −0.5 0.5 0.5 −0.5 −0.5 −1 −1 0 0 0 0 −1.5 −1.5 −0.5 −0.5 20 40 20 60 40 80 60 100 80 100 −1 20 40 2060 4080 60 80 100 120 140 100 120 140 ! Mapping ! x? looks polygonal. −0.5 −0.5 −1 −1.5 −1.5 ! If x0 sparse and 80 100chosen, sign(x?60 = sign(x0140 20 40 60 well ) 2060 4080 10080 100 120 ). 20 40 60 80 100 20 40 120 140
- 9. Overview • Polytope Noiseless Recovery • Local Behavior of Sparse Regularization • Robustness to Small Noise • Robustness to Bounded Noise • Compressed Sensing RIP Theory
- 10. Polytopes Approach = ( i )i R2 3 3 2 1 x0 x0 1 y x (y) 3 B = {x ||x||1 } 2 (B ) = ||x0 ||1 x0 solution of P0 ( x0 ) ⇥ x0 ⇤ (B ) min ||x||1 x=y
- 11. Polytopes Approach = ( i )i R2 3 3 2 1 x0 x0 1 y x (y) 3 B = {x ||x||1 } 2 (B ) = ||x0 ||1 x0 solution of P0 ( x0 ) ⇥ x0 ⇤ (B ) min ||x||1 (P0 (y)) x=y
- 12. Proof x0 solution of P0 ( x0 ) ⇥ x0 ⇤ (B ) = Suppose x0 not solution, show (x0 ) int( B ) x0 = z, ⇥z, such that ||z||1 = (1 )||x0 ||1 . For any h = Im( ) such that ||h||1 < + || || 1,1 (x0 ) + h = (z + ) ||z + ⇥||1 ||z|| + || + h||1 (1 )||x0 ||1 + || ||1,1 ||h||1 < ||x0 ||1 = (x0 ) + h (B )
- 13. Proof x0 solution of P0 ( x0 ) ⇥ x0 ⇤ (B ) = Suppose x0 not solution, show (x0 ) int( B ) x0 = z, ⇥z, such that ||z||1 = (1 )||x0 ||1 . For any h = Im( ) such that ||h||1 < + || || 1,1 (x0 ) + h = (z + ) ||z + ⇥||1 ||z|| + || + h||1 (1 )||x0 ||1 + || ||1,1 ||h||1 < ||x0 ||1 = (x0 ) + h (B ) (B ) = Suppose (x0 ) int( B ) 0 x0 Then ⇥z, x0 = (1 ) z and ||z||1 < ||x0 ||1 . z ||(1 )z||1 < ||x0 ||1 so x0 is not a solution.
- 14. Basis-Pursuit Mapping in 2-D = ( i )i R2 3 C(0,1,1) 2 3 K(0,1,1) 1 y x (y) 2-D quadrant 2-D cones Ks = ( i si )i R3 i 0 Cs = Ks
- 15. Basis-Pursuit Mapping in 3-D = ( i )i R3 N j i N Cs R y x (y) k Delaunay paving of the sphere with spherical triangles Cs Empty spherical caps property
- 16. Polytope Noiseless Recovery Counting faces of random polytopes: [Donoho] All x0 such that ||x0 ||0 Call (P/N )P are identifiable. Most x0 such that ||x0 ||0 Cmost (P/N )P are identifiable. 1 Call (1/4) 0.065 0.9 0.8 Cmost (1/4) 0.25 0.7 0.6 0.5 Sharp constants. 0.4 0.3 No noise robustness. 0.2 0.1 0 50 100 150 200 250 300 350 400 RIP All Most
- 17. Overview • Polytope Noiseless Recovery • Local Behavior of Sparse Regularization • Robustness to Small Noise • Robustness to Bounded Noise • Compressed Sensing RIP Theory
- 18. First Order CNS Condition 1 x ⇥ argmin E(x) = || x y||2 + ||x||1 x RN 2 Support of the solution: I = {i ⇥ {0, . . . , N 1} xi ⇤= 0} First order condition: x solution of P (y) 0 E(x ) sI = sign(xI ), ( x y) + s = 0 where ||sI c || 1
- 19. First Order CNS Condition 1 x ⇥ argmin E(x) = || x y||2 + ||x||1 x RN 2 Support of the solution: I = {i ⇥ {0, . . . , N 1} xi ⇤= 0} First order condition: x solution of P (y) 0 E(x ) sI = sign(xI ), ( x y) + s = 0 where ||sI c || 1 1 Note: sI c = Ic ( x y) Theorem: || Ic ( x y)|| x solution of P (y)
- 20. Local Parameterization If I has full rank: + I =( I I) 1 I ( x y) + s = 0 = xI = + y I ( I I ) 1 sI Implicit equation
- 21. Local Parameterization If I has full rank: + I =( I I) 1 I ( x y) + s = 0 = xI = + y I ( I I ) 1 sI Implicit equation Given y compute x compute (s, I). Define x ¯ (¯)I = + y ˆ y ¯( I ¯ II ) 1 sI x ¯ (¯)I c = 0 ˆ y By construction x (y) = x . ˆ
- 22. Local Parameterization If I has full rank: + I =( I I) 1 I ( x y) + s = 0 =xI = + y I ( I I ) 1 sI Implicit equation Given y compute x compute (s, I). 2 1 2 ¯( 1 Define x ¯ (¯)I = I y ˆ y + ¯ I I) 1 sI 1 2 ||x ||0= 0 x ¯ (¯)I c = 0 ˆ y 2 1 By construction x (y) = x . ˆ 1 2 1 2 Theorem: For (y, ) 2 H, let x? be a solution of P (y), / such that I is full rank, I = supp(x? ), for ( ¯ , y ) close to ( , y), x ¯ (¯) is solution of P ¯ (¯) ¯ ˆ y y Remark: the theorem holds outside a union of hyperplanes.
- 23. Full Rank Condition Lemma: There exists x? such that ker( I) = {0}. ! if ker( I ) 6= {0}, x? not unique.
- 24. Full Rank Condition Lemma: There exists x? such that ker( I) = {0}. ! if ker( I ) 6= {0}, x? not unique. Proof: If ker( I) 6= {0}, let ⌘I 2 ker( I) 6= 0. Define 8 t 2 R, xt = x? + t⌘.
- 25. Full Rank Condition Lemma: There exists x? such that ker( I) = {0}. ! if ker( I ) 6= {0}, x? not unique. Proof: If ker( I) 6= {0}, let ⌘I 2 ker( I) 6= 0. Define 8 t 2 R, xt = x? + t⌘. Let t0 the smallest |t| s.t. sign(xt ) 6= sign(x? ). xt t t0 0
- 26. Full Rank Condition Lemma: There exists x? such that ker( I) = {0}. ! if ker( I ) 6= {0}, x? not unique. Proof: If ker( I) 6= {0}, let ⌘I 2 ker( I) 6= 0. Define 8 t 2 R, xt = x? + t⌘. Let t0 the smallest |t| s.t. sign(xt ) 6= sign(x? ). xt = x? and same sign: xt 8 |t| < t0 , xt is solution. t t0 0
- 27. Full Rank Condition Lemma: There exists x? such that ker( I) = {0}. ! if ker( I ) 6= {0}, x? not unique. Proof: If ker( I) 6= {0}, let ⌘I 2 ker( I) 6= 0. Define 8 t 2 R, xt = x? + t⌘. Let t0 the smallest |t| s.t. sign(xt ) 6= sign(x? ). xt = x? and same sign: xt 8 |t| < t0 , xt is solution. By continuity, xt0 solution. t t0 0 and | supp(xt0 )| < | supp(x? )|.
- 28. Proof x ¯ (¯)I = ˆ y + ¯ ¯( ) 1 sI I = supp(s) I y I I To show: 8 j 2 I, / ds (¯, ¯ ) = |h'j , y j y ¯ I x ¯ (¯)i| 6 ˆ y
- 29. Proof x ¯ (¯)I = ˆ y + ¯ ¯( ) 1 sI I = supp(s) I y I I To show: 8 j 2 I, / ds (¯, ¯ ) = |h'j , y j y ¯ I x ¯ (¯)i| 6 ˆ y Case 1: ds (y, ) < j ! ok, by continuity.
- 30. Proof x ¯ (¯)I = ˆ y + ¯ ¯( ) 1 sI I = supp(s) I y I I To show: 8 j 2 I, / ds (¯, ¯ ) = |h'j , y j y ¯ I x ¯ (¯)i| 6 ˆ y Case 1: ds (y, ) < j Case 2: ds (y, ) = and 'j 2 Im( j I) ! ok, by continuity. then ds (¯, ¯ ) = ¯ ! ok. j y
- 31. Proof x ¯ (¯)I = ˆ y + ¯ ¯( ) 1 sI I = supp(s) I y I I To show: 8 j 2 I, / ds (¯, ¯ ) = |h'j , y j y ¯ I x ¯ (¯)i| 6 ˆ y Case 1: ds (y, ) < j Case 2: ds (y, ) = and 'j 2 Im( j I) ! ok, by continuity. then ds (¯, ¯ ) = ¯ ! ok. j y Case 3: ds (y, ) = and j 'j 2 Im( I ) / ! exclude this case.
- 32. Proof x ¯ (¯)I = ˆ y + ¯ ¯( ) 1 sI I = supp(s) I y I I To show: 8 j 2 I, / ds (¯, ¯ ) = |h'j , y j y ¯ I x ¯ (¯)i| 6 ˆ y Case 1: ds (y, ) < j Case 2: ds (y, ) = and 'j 2 Im( j I) ! ok, by continuity. then ds (¯, ¯ ) = ¯ ! ok. j y Case 3: ds (y, ) = and j 'j 2 Im( I ) / ! exclude this case. Exclude hyperplanes: [ H= {Hs,j 'j 2 Im( I )} / Hs,j = (y, ) ds (¯, ¯ ) = j y
- 33. Proof x ¯ (¯)I = ˆ y + ¯ ¯( ) 1 sI I = supp(s) I y I I To show: 8 j 2 I, / ds (¯, ¯ ) = |h'j , y j y ¯ I x ¯ (¯)i| 6 ˆ y Case 1: ds (y, ) < j Case 2: ds (y, ) = and 'j 2 Im( j I) ! ok, by continuity. then ds (¯, ¯ ) = ¯ ! ok. j y Case 3: ds (y, ) = and H;,j j 'j 2 Im( I ) / ! exclude this case. x?= 0 Exclude hyperplanes: [ H= {Hs,j 'j 2 Im( I )} / Hs,j = (y, ) ds (¯, ¯ ) = j y
- 34. Proof x ¯ (¯)I = ˆ y + ¯ ¯( ) 1 sI I = supp(s) I y I I To show: 8 j 2 I, / ds (¯, ¯ ) = |h'j , y j y ¯ I x ¯ (¯)i| 6 ˆ y Case 1: ds (y, ) < j Case 2: ds (y, ) = and 'j 2 Im( j I) ! ok, by continuity. then ds (¯, ¯ ) = ¯ ! ok. j y Case 3: ds (y, ) = and H;,j j 'j 2 Im( I ) / ! exclude this case. HI,j x?= 0 Exclude hyperplanes: [ H= {Hs,j 'j 2 Im( I )} / Hs,j = (y, ) ds (¯, ¯ ) = j y
- 35. Local Affine Maps Local parameterization: x ¯ (¯)I = ˆ y + ¯ ¯( I) 1 I y I sI Under uniqueness assumption: y x are piecewise a ne functions. x x1 breaking points change of support of x x0 (BP sol.) x k =0 0 =0 k x2
- 36. Projector E (x) = 1 || x 2 y||2 + ||x||1 Proposition: If x1 and x2 minimize E , then x1 = x2 . Corrolary: µ(y) = x1 = x2 is uniquely defined.
- 37. Projector E (x) = 1 || x 2 y||2 + ||x||1 Proposition: If x1 and x2 minimize E , then x1 = x2 . Corrolary: µ(y) = x1 = x2 is uniquely defined. Proof: x3 = (x1 + x2 )/2 is solution and if x1 6= x2 , 2||x3 ||1 6 ||x1 ||1 + ||x2 ||1 2|| x3 y||2 < || x1 y||2 + || x2 y||2 E (x3 ) < E (x1 ) = E (x2 ) =) contradiction.
- 38. Projector E (x) = 1 || x 2 y||2 + ||x||1 Proposition: If x1 and x2 minimize E , then x1 = x2 . Corrolary: µ(y) = x1 = x2 is uniquely defined. Proof: x3 = (x1 + x2 )/2 is solution and if x1 6= x2 , 2||x3 ||1 6 ||x1 ||1 + ||x2 ||1 2|| x3 y||2 < || x1 y||2 + || x2 y||2 E (x3 ) < E (x1 ) = E (x2 ) =) contradiction. For (¯, ) close to (y, ) 2 H: y / µ(¯) = PI (¯) y y dI + +,⇤ = I I = I sI PI : orthogonal projector on { x supp(x) = I}.
- 39. Overview • Polytope Noiseless Recovery • Local Behavior of Sparse Regularization • Robustness to Small Noise • Robustness to Bounded Noise • Compressed Sensing RIP Theory
- 40. Uniqueness Sufficient Condition E (x) = 1 || x 2 y||2 + ||x||1
- 41. Uniqueness Sufficient Condition E (x) = 1 || x 2 y||2 + ||x||1 Theorem: If I has full rank and || I c ( x y)|| < then x? is the unique minimizer of E .
- 42. Uniqueness Sufficient Condition E (x) = 1 || x 2 y||2 + ||x||1 Theorem: If I has full rank and || I c ( x y)|| < then x? is the unique minimizer of E . Proof: Let x? be a minimizer. ˜ Then ? x = x =) ˜ ? x? ˜I x? 2 ker( I I) = {0}. || Ic ( x? ˜ y)||1 = || Ic ( x? y)||1 < =) supp(˜? ) ⇢ I x =) x? = x? ˜
- 43. Robustness to Small Noise Identifiability crition: [Fuchs] For s ⇥ { 1, 0, +1}N , let I = supp(s) +, F(s) = || I sI || where ⇥I = Ic I ( I is assumed to have full rank) + I =( I I) 1 I satisfies + I I = IdI
- 44. Robustness to Small Noise Identifiability crition: [Fuchs] For s ⇥ { 1, 0, +1}N , let I = supp(s) +, F(s) = || I sI || where ⇥I = Ic I ( I is assumed to have full rank) + I =( I I) 1 I satisfies + I I = IdI Theorem: If F (sign(x0 )) < 1, T = min |x0,i | i I If ||w||/T is small enough and ||w||, then x0 + + I w ( I I) 1 sign(x0,I ) is the unique solution of P (y). ⇥ If ||w|| small enough, ||x x0 || = O(||w||).
- 45. Geometric Interpretation +, dI = sI F(s) = || I sI || = max | dI , j ⇥| I i j /I where dI defined by: dI = I( I I) 1 sI i I, dI , i = si j
- 46. Geometric Interpretation +, dI = sI F(s) = || I sI || = max | dI , j ⇥| I i j /I where dI defined by: dI = I( I I) 1 sI i I, dI , i = si j Condition F (s) < 1: no vector j inside the cap Cs . dI j Cs i | dI , ⇥| < 1
- 47. Geometric Interpretation +, dI = sI F(s) = || I sI || = max | dI , j ⇥| I i j /I where dI defined by: dI = I( I I) 1 sI i I, dI , i = si j Condition F (s) < 1: no vector j inside the cap Cs . dI j dI i k | dI , ⇥| < 1 j Cs i | dI , ⇥| < 1
- 48. Sketch of Proof Local candidate: implicit equation x = x(sign(x )) ˆ where x(s)I = ˆ + I y ( I I) 1 sI , I = supp(s) ⇥ To prove: x = x(sign(x0 )) is the unique solution of P (y). ˆ ˆ
- 49. Sketch of Proof Local candidate: implicit equation x = x(sign(x )) ˆ where x(s)I = ˆ + I y ( I I) 1 sI , I = supp(s) ⇥ To prove: x = x(sign(x0 )) is the unique solution of P (y). ˆ ˆ Sign consistency: sign(ˆ) = sign(x0 ) x (C1 ) y = x0 + w = x = x0 + ˆ + I w ( I I) 1 sI ,2 ||w|| + ||( I) + || I || I 1 || , <T = (C1 )
- 50. Sketch of Proof Local candidate: implicit equation x = x(sign(x )) ˆ where x(s)I = ˆ + I y ( I I) 1 sI , I = supp(s) ⇥ To prove: x = x(sign(x0 )) is the unique solution of P (y). ˆ ˆ Sign consistency: sign(ˆ) = sign(x0 ) x (C1 ) y = x0 + w = x = x0 + ˆ + I w ( I I) 1 sI ,2 ||w|| + ||( I) + || I || I 1 || , <T = (C1 ) First order conditions: || Ic ( ˆ x y)|| < (C2 ) || Ic ( I + I Id)||2, ||w|| (1 F (s)) < 0 = (C2 )
- 51. Sketch of Proof (cont) ,2 ||w|| + ||( I) + 1 || I || I || , <T = x is ˆ the solution Ic ( Id)||2, ||w|| (1 F (s)) < 0 + || I I
- 52. Sketch of Proof (cont) ,2 ||w|| + ||( I) + 1 || I || I || , <T = x is ˆ the solution Ic ( Id)||2, ||w|| (1 F (s)) < 0 + || I I For ||w||/T < ⇥max , one can choose ||w||/T such that x is the solution of P (y). ˆ ||w|| 0 = ⇥⇤ T max | |w ||w || +⇥ ⇤= T
- 53. Sketch of Proof (cont) ,2 ||w|| + ||( I) + 1 || I || I || , <T = x is ˆ the solution Ic ( Id)||2, ||w|| (1 F (s)) < 0 + || I I For ||w||/T < ⇥max , one can choose ||w||/T such that x is the solution of P (y). ˆ ||w|| 0 = ⇥⇤ ||ˆ x x0 || || + + ||( I I w|| I) 1 || ,2 T max = O(||w||) | |w ||w || =⇥ ||ˆ x x0 || = O(||w||) +⇥ ⇤= T
- 54. Overview • Polytope Noiseless Recovery • Local Behavior of Sparse Regularization • Robustness to Small Noise • Robustness to Bounded Noise • Compressed Sensing RIP Theory
- 55. Robustness to Bounded Noise Exact Recovery Criterion (ERC): [Tropp] For a support I ⇥ {0, . . . , N 1} with I full rank, ERC(I) = || I || , where ⇥I = Ic +, I = || + I Ic ||1,1 = max || c + I j ||1 j I (use ||(aj )j ||1,1 = maxj ||aj ||1 ) Relation with F criterion: ERC(I) = max F(s) s,supp(s) I
- 56. Robustness to Bounded Noise Exact Recovery Criterion (ERC): [Tropp] For a support I ⇥ {0, . . . , N 1} with I full rank, ERC(I) = || I || , where ⇥I = Ic +, I = || + I Ic ||1,1 = max || c + I j ||1 j I (use ||(aj )j ||1,1 = maxj ||aj ||1 ) Relation with F criterion: ERC(I) = max F(s) s,supp(s) I Theorem: If ERC(supp(x0 )) < 1 and ||w||, then x is unique, satisfies supp(x ) supp(x0 ), and ||x0 x || = O(||w||)
- 57. Sketch of Proof Restricted recovery: 1 x ⇥ argmin || x ˆ y||2 + ||x||1 supp(x) I 2 ⇥ To prove: x is the unique solution of P (y). ˆ
- 58. Sketch of Proof Restricted recovery: 1 x ⇥ argmin || x ˆ y||2 + ||x||1 supp(x) I 2 ⇥ To prove: x is the unique solution of P (y). ˆ Implicit equation: xI = ˆ + I y ( I I) 1 sI Important: s = sign(ˆ) is not equal to sign(x ). x
- 59. Sketch of Proof Restricted recovery: 1 x ⇥ argmin || x ˆ y||2 + ||x||1 supp(x) I 2 ⇥ To prove: x is the unique solution of P (y). ˆ Implicit equation: xI = ˆ + I y ( I I) 1 sI Important: s = sign(ˆ) is not equal to sign(x ). x First order conditions: || Ic ( ˆ x y)|| < (C2 ) || Ic ( I + I Id)||2, ||w|| (1 F (s)) < 0 = (C2 )
- 60. Sketch of Proof Restricted recovery: 1 x ⇥ argmin || x ˆ y||2 + ||x||1 supp(x) I 2 ⇥ To prove: x is the unique solution of P (y). ˆ Implicit equation: xI = ˆ + I y ( I I) 1 sI Important: s = sign(ˆ) is not equal to sign(x ). x First order conditions: || Ic ( ˆ x y)|| < (C2 ) || Ic ( I + I Id)||2, ||w|| (1 F (s)) < 0 = (C2 ) Since s is arbitrary: ERC(I) < 1 = F (s) < 1 Hence, choosing ||w|| implies (C2 ).
- 61. Weak ERC For A = (ai )i , B = (bi )i , where ai , bi RP , (A, B) = max | ai , bj ⇥| j i I (A) = max | ai , aj ⇥| j i=j Weak Exact Recovery Criterion: [Gribonval,Dossal] Denoting = ( i )N 1 where i=0 i RP ( I, Ic ) if ( I) <1 w-ERC(I) = 1 ( I) + otherwise. Theorem: F(s) ERC(I) w-ERC(I) (for I = supp(s))
- 62. Proof Theorem: F(s) ERC(I) w-ERC(I) (for I = supp(s)) ERC(I) = max || + I j ||1 ||( I I) 1 ||1,1 max || I j ||1 j /I j /I max || I ⇥j ||1 = max | ⇥i , ⇥j ⇥| = ( I, Ic ) j /I j /I i m
- 63. Proof Theorem: F(s) ERC(I) w-ERC(I) (for I = supp(s)) ERC(I) = max || + I j ||1 ||( I I) 1 ||1,1 max || I j ||1 j /I j /I max || I ⇥j ||1 = max | ⇥i , ⇥j ⇥| = ( I, Ic ) j /I j /I i m One has I I = Id H, if ||H||1,1 < 1, ( I I) 1 = (Id H) 1 = Hk k 0 1 I) = 1 ||( ||1,1 ||H||k I 1,1 1 ||H||1,1 k 0 ||H||1,1 = max | ⇥i , ⇥j ⇥| = ( I) i I j=i
- 64. Example: Random Matrix P = 200, N = 1000 1 0.8 0.6 0.4 0.2 0 0 10 20 30 40 50 w-ERC < 1 F <1 ERC < 1 x = x0
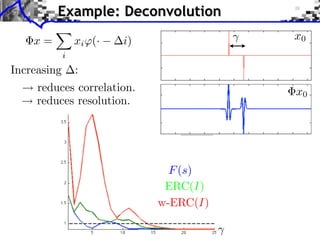
- 65. Example: Deconvolution ⇥x = xi (· i) x0 i Increasing : reduces correlation. x0 reduces resolution. F (s) ERC(I) w-ERC(I)
- 66. Coherence Bounds Mutual coherence: µ( ) = max | i, j ⇥| i=j |I|µ( ) Theorem: F(s) ERC(I) w-ERC(I) 1 (|I| 1)µ( )
- 67. Coherence Bounds Mutual coherence: µ( ) = max | i, j ⇥| i=j |I|µ( ) Theorem: F(s) ERC(I) w-ERC(I) 1 (|I| 1)µ( ) 1 1 Theorem: If ||x0 ||0 < 1+ and ||w||, 2 µ( ) one has supp(x ) I, and ||x0 x || = O(||w||)
- 68. Coherence Bounds Mutual coherence: µ( ) = max | i, j ⇥| i=j |I|µ( ) Theorem: F(s) ERC(I) w-ERC(I) 1 (|I| 1)µ( ) 1 1 Theorem: If ||x0 ||0 < 1+ and ||w||, 2 µ( ) one has supp(x ) I, and ||x0 x || = O(||w||) N P One has: µ( ) P (N 1) Optimistic setting: For Gaussian matrices: ||x0 ||0 O( P ) µ( ) log(P N )/P For convolution matrices: useless criterion.
- 69. Coherence - Examples Incoherent pair of orthobases: Diracs/Fourier 2i 1 = {k ⇤⇥ [k m]}m 2 = k N 1/2 e N mk m =[ 1, 2] RN 2N
- 70. Coherence - Examples Incoherent pair of orthobases: Diracs/Fourier 2i 1 = {k ⇤⇥ [k m]}m 2 = k N 1/2 e N mk m =[ 1, 2] RN 2N 1 min ||y x||2 + ||x||1 x R2N 2 1 min ||y 1 x1 2 x2 ||2 + ||x1 ||1 + ||x2 ||1 x1 ,x2 RN 2 = +
- 71. Coherence - Examples Incoherent pair of orthobases: Diracs/Fourier 2i 1 = {k ⇤⇥ [k m]}m 2 = k N 1/2 e N mk m =[ 1, 2] RN 2N 1 min ||y x||2 + ||x||1 x R2N 2 1 min ||y 1 x1 2 x2 ||2 + ||x1 ||1 + ||x2 ||1 x1 ,x2 RN 2 = + 1 µ( ) = = separates up to N /2 Diracs + sines. N
- 72. Overview • Polytope Noiseless Recovery • Local Behavior of Sparse Regularization • Robustness to Small Noise • Robustness to Bounded Noise • Compressed Sensing RIP Theory
- 73. CS with RIP 1 recovery: y = x0 + w x⇥ argmin ||x||1 where || x y|| ||w|| 1 ⇥ argmin || x y||2 + ||x||1 x 2 Restricted Isometry Constants: ⇥ ||x||0 k, (1 k )||x||2 || x||2 (1 + k )||x||2
- 74. CS with RIP 1 recovery: y = x0 + w x⇥ argmin ||x||1 where || x y|| ||w|| 1 ⇥ argmin || x y||2 + ||x||1 x 2 Restricted Isometry Constants: ⇥ ||x||0 k, (1 k )||x||2 || x||2 (1 + k )||x||2 Theorem: If 2k 2 1, then [Candes 2009] C0 ||x0 x || ⇥ ||x0 xk ||1 + C1 k where xk is the best k-term approximation of x0 .
- 75. Elements of Proof Reference: E. J. Cand`s, CRAS, 2006 e k elements {0, . . . , N 1} = T0 ⇥ T1 ⇥ . . . ⇥ Tm h=x x0 largest largest xk = xT0 of x0 of hT0c Optimality conditions: ||hT0 ||1 c ||hT0 ||1 + 2||xT0 ||1 c Explicit constants: 2 2k C0 = ||x0 x || ⇥ ||x0 xk ||1 + C1 1 2k s 1 + 2k 2 =2 C0 = C1 = 1 1 1 ⇥ 2k
- 76. Singular Values Distributions Eigenvalues of I I with |I| = k are essentially in [a, b] a = (1 )2 and b = (1 )2 where = k/P When k = P + , the eigenvalue distribution tends to 1 f (⇥) = (⇥ b)+ (a ⇥)+ [Marcenko-Pastur] 1.5 2⇤ ⇥ P=200, k=10 P=200, k=10 f ( ) 1.5 1 1 0.5 P = 200, k = 10 0.5 0 0 0.5 1 1.5 2 2.5 0 0 0.5 1 P=200, k=30 1.5 2 2.5 1 P=200, k=30 0.8 1 0.6 0.8 0.4 k = 30 0.6 0.2 0.4 0 0.2 0 0.5 1 1.5 2 2.5 0 0 0.5 1 P=200, k=50 1.5 2 2.5 P=200, k=50 0.8 0.8 0.6 0.6 0.4 Large deviation inequality [Ledoux] 0.4 0.2
- 77. RIP for Gaussian Matrices Link with coherence: µ( ) = max | i, j ⇥| i=j 2 = µ( ) k (k 1)µ( )
- 78. RIP for Gaussian Matrices Link with coherence: µ( ) = max | i, j ⇥| i=j 2 = µ( ) k (k 1)µ( ) For Gaussian matrices: µ( ) log(P N )/P
- 79. RIP for Gaussian Matrices Link with coherence: µ( ) = max | i, j ⇥| i=j 2 = µ( ) k (k 1)µ( ) For Gaussian matrices: µ( ) log(P N )/P Stronger result: C Theorem: If k P log(N/P ) then 2k 2 1 with high probability.
- 80. Numerics with RIP Stability constant of A: (1 ⇥1 (A))|| ||2 ||A ||2 (1 + ⇥2 (A))|| ||2 smallest / largest eigenvalues of A A
- 81. Numerics with RIP Stability constant of A: (1 ⇥1 (A))|| ||2 ||A ||2 (1 + ⇥2 (A))|| ||2 smallest / largest eigenvalues of A A Upper/lower RIC: i k = max i( I) ˆ2 |I|=k k k = min( k , 1 k) 2 2 1 ˆ2 k Monte-Carlo estimation: ˆk k k
- 82. Conclusion s=3 s=6 Local behavior: 0.5 0.5 ! x? polygonal. 0 ? 0 y ! x piecewise a ne. −0.5 −0.5 −1 10 20 30 40 50 60 10 20 30 40 50 60 s=13 s=25 1 1.5 1 0.5 0.5 0 0 −0.5 −0.5 −1 −1.5 20 40 60 80 100 20 40 60 80 100 120 140
- 83. Conclusion s=3 s=6 Local behavior: 0.5 0.5 ! x? polygonal. 0 ? 0 y ! x piecewise a ne. −0.5 −0.5 Noiseless recovery: −1 10 20 30 40 50 60 10 20 30 40 50 60 () geometry of polytopes. s=13 s=25 1 1.5 1 0.5 0.5 0 0 −0.5 x0 −0.5 −1 −1.5 20 40 60 80 100 20 40 60 80 100 120 140
- 84. Conclusion s=3 s=6 Local behavior: 0.5 0.5 ! x? polygonal. 0 ? 0 y ! x piecewise a ne. −0.5 −0.5 Noiseless recovery: −1 10 20 30 40 50 60 10 20 30 40 50 60 () geometry of polytopes. s=13 s=25 Small noise: 1 1.5 1 ! sign stability. 0.5 0.5 0 Bounded noise: 0 −0.5 x0 −0.5 −1 ! support inclusion. −1.5 20 40 60 80 100 20 40 60 80 100 120 140 RIP-based: ! no support stability, L1 bounds.