Sorting algorithms
Download as PPT, PDF4 likes1,204 views

Slides where you find implementation of different types of sorting. i.e:- bubble sort, insertion sort, merge sort.











![Bubble Sort Algorithm
#include<iostream>
using namespace std;
int main(){
//declaring array
int array[5];
cout<<"Enter 5 numbers randomly : "<<endl;
for(int i=0; i<5; i++)
{
//Taking input in array
cin>>array[i];
}
cout<<endl;
cout<<"Input array is: "<<endl;
for(int j=0; j<5; j++)
{
//Displaying Array
cout<<"tttValue at "<<j<<" Index: "<<array[j]<<endl;
}
cout<<endl;](https://image.slidesharecdn.com/sortingalgorithms-150622180850-lva1-app6892/85/Sorting-algorithms-16-320.jpg)
![• // Bubble Sort Starts Here
int temp;
for(int i2=0; i2<=4; i2++) // outer loop
{
for(int j=0; j<4; j++) //inner loop
{
//Swapping element in if statement
if(array[j]>array[j+1])
{
temp=array[j];
array[j]=array[j+1];
array[j+1]=temp;
}
}
}
// Displaying Sorted array
cout<<" Sorted Array is: "<<endl;
for(int i3=0; i3<5; i3++)
{
cout<<"tttValue at "<<i3<<" Index: "<<array[i3]<<endl;
}
return 0;
}](https://image.slidesharecdn.com/sortingalgorithms-150622180850-lva1-app6892/85/Sorting-algorithms-17-320.jpg)
![DRY RUN OF CODE
• size of the array is 5 you can change it with your
desired size of array
Input array is
5 4 3 2 -5
so values on indexes of array is
array[0]= 5
array[1]= 4
array[2]= 3
array[3]= 2
array[4]=-5](https://image.slidesharecdn.com/sortingalgorithms-150622180850-lva1-app6892/85/Sorting-algorithms-18-320.jpg)
![• input 5 4 3 2 -5
for i2= 0;
j=0
array[j]>array[j+1]
5 > 4 if condition true
here we are swapping 4 and 5
array after 4 5 3 2 -5
j=1
array[j]>array[j+1]
5 > 3 if condition true](https://image.slidesharecdn.com/sortingalgorithms-150622180850-lva1-app6892/85/Sorting-algorithms-20-320.jpg)
![• here we are swapping 3 and 5
array after 4 3 5 2 -5
j=2
array[j]>array[j+1]
5 > 2 if condition true
here we are swapping 2 and 5
array after 4 3 2 5 -5
j=3
array[j]>array[j+1]
5 > -5 if condition true](https://image.slidesharecdn.com/sortingalgorithms-150622180850-lva1-app6892/85/Sorting-algorithms-21-320.jpg)









































![Algorithm for Selection Sort
void selectionSort(int arr[], int n) {
int i, j, minIndex, tmp;
for (i = 0; i < n - 1; i++) {
minIndex = i;
for (j = i + 1; j < n; j++) {
if (arr[j] < arr[minIndex])
minIndex = j; }
if (minIndex != i) {
tmp = arr[i];
arr[i] = arr[minIndex];
arr[minIndex] = tmp;
}
}
}](https://image.slidesharecdn.com/sortingalgorithms-150622180850-lva1-app6892/85/Sorting-algorithms-65-320.jpg)






![Algorithm for Insertion Sort
int a[6] = {5, 1, 6, 2, 4, 3};
int i, j, key;
for(i=1; i<6; i++)
{
key = a[i];
j = i-1;
while(j>=0 && key < a[j])
{
a[j+1] = a[j];
j--;
}
a[j+1] = key;
}](https://image.slidesharecdn.com/sortingalgorithms-150622180850-lva1-app6892/85/Sorting-algorithms-73-320.jpg)











![Procedure of Merge Sort
Assume, that both arrays are sorted in ascending order and we want
resulting array to maintain the same order. Algorithm to merge two
arrays A[0..m-1] and B[0..n-1] into an array C[0..m+n-1] is as following:
i.Introduce read-indices i, j to traverse arrays A and B, accordingly.
Introduce write-index k to store position of the first free cell in the
resulting array. By default i = j = k = 0.
ii.At each step: if both indices are in range (i < m and j < n), choose
minimum of (A[i], B[j]) and write it to C[k]. Otherwise go to step 4.
iii.Increase k and index of the array, algorithm located minimal value at,
by one. Repeat step 2.
iv.Copy the rest values from the array, which index is still in range, to the
resulting array.](https://image.slidesharecdn.com/sortingalgorithms-150622180850-lva1-app6892/85/Sorting-algorithms-88-320.jpg)
![Merge Sort Algorithm
// m - size of A
// n - size of B
// size of C array must be equal or greater than
// m + n
void merge(int m, int n, int A[], int B[], int C[]) {
int i, j, k;
i = 0;
j = 0;
k = 0;](https://image.slidesharecdn.com/sortingalgorithms-150622180850-lva1-app6892/85/Sorting-algorithms-89-320.jpg)
![Merge Sort Algorithm Cont..
while (i < m && j < n) {
if (A[i] <= B[j]) {
C[k] = A[i];
i++;
} else {
C[k] = B[j];
j++;
}
k++;
}](https://image.slidesharecdn.com/sortingalgorithms-150622180850-lva1-app6892/85/Sorting-algorithms-90-320.jpg)
![Merge Sort Algorithm Cont..
if (i < m) {
for (int p = i; p < m; p++) {
C[k] = A[p];
k++;
}
} else {
for (int p = j; p < n; p++) {
C[k] = B[p];
k++;
}
}
}](https://image.slidesharecdn.com/sortingalgorithms-150622180850-lva1-app6892/85/Sorting-algorithms-91-320.jpg)
![Enhancement
• Algorithm could be enhanced in many ways. For instance, it is
reasonable to check, if A[m - 1] < B[0] or B[n - 1] < A[0].
• In any of those cases, there is no need to do more comparisons.
• Algorithm could just copy source arrays in the resulting one in the
right order.
• More complicated enhancements may include searching for
interleaving parts and run merge algorithm for them only. It could
save up much time, when sizes of merged arrays differ in scores of
times.](https://image.slidesharecdn.com/sortingalgorithms-150622180850-lva1-app6892/85/Sorting-algorithms-92-320.jpg)
















![Data Structures - Lecture 7 [Linked List]](https://cdn.slidesharecdn.com/ss_thumbnails/lecture-7linkedlists-150121011916-conversion-gate02-thumbnail.jpg?width=560&fit=bounds)














Ad
More Related Content
What's hot (20)
Viewers also liked (20)


















Ad
Similar to Sorting algorithms (20)





![Data Structures - Lecture 8 [Sorting Algorithms]](https://cdn.slidesharecdn.com/ss_thumbnails/lecture-8sortingalgorithms-150205105023-conversion-gate02-thumbnail.jpg?width=560&fit=bounds)














Ad
Recently uploaded (20)




















Sorting algorithms
- 1. Different types of Sorting Techniques used in Data Structures And Algorithms
- 2. Sorting: Definition Sorting: an operation that segregates items into groups according to specified criterion. A = { 3 1 6 2 1 3 4 5 9 0 } A = { 0 1 1 2 3 3 4 5 6 9 }
- 3. Sorting • Sorting = ordering. • Sorted = ordered based on a particular way. • Generally, collections of data are presented in a sorted manner. • Examples of Sorting: • Words in a dictionary are sorted (and case distinctions are ignored). • Files in a directory are often listed in sorted order. • The index of a book is sorted (and case distinctions are ignored).
- 4. Review of Complexity Most of the primary sorting algorithms run on different space and time complexity. Time Complexity is defined to be the time the computer takes to run a program (or algorithm in our case). Space complexity is defined to be the amount of memory the computer needs to run a program.
- 5. Types of Sorting Algorithms There are many, many different types of sorting algorithms, but the primary ones are: Bubble Sort Selection Sort Insertion Sort Merge Sort
- 6. Bubble Sort: Idea • Idea: bubble in water. • Bubble in water moves upward. Why? • How? • When a bubble moves upward, the water from above will move downward to fill in the space left by the bubble.
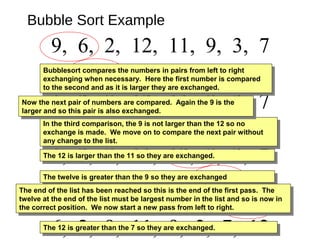
- 7. Bubble Sort Example 9, 6, 2, 12, 11, 9, 3, 7 6, 9, 2, 12, 11, 9, 3, 7 6, 2, 9, 12, 11, 9, 3, 7 6, 2, 9, 12, 11, 9, 3, 7 6, 2, 9, 11, 12, 9, 3, 7 6, 2, 9, 11, 9, 12, 3, 7 6, 2, 9, 11, 9, 3, 12, 7 6, 2, 9, 11, 9, 3, 7, 12The 12 is greater than the 7 so they are exchanged.The 12 is greater than the 7 so they are exchanged. The 12 is greater than the 3 so they are exchanged.The 12 is greater than the 3 so they are exchanged. The twelve is greater than the 9 so they are exchangedThe twelve is greater than the 9 so they are exchanged The 12 is larger than the 11 so they are exchanged.The 12 is larger than the 11 so they are exchanged. In the third comparison, the 9 is not larger than the 12 so no exchange is made. We move on to compare the next pair without any change to the list. In the third comparison, the 9 is not larger than the 12 so no exchange is made. We move on to compare the next pair without any change to the list. Now the next pair of numbers are compared. Again the 9 is the larger and so this pair is also exchanged. Now the next pair of numbers are compared. Again the 9 is the larger and so this pair is also exchanged. Bubblesort compares the numbers in pairs from left to right exchanging when necessary. Here the first number is compared to the second and as it is larger they are exchanged. Bubblesort compares the numbers in pairs from left to right exchanging when necessary. Here the first number is compared to the second and as it is larger they are exchanged. The end of the list has been reached so this is the end of the first pass. The twelve at the end of the list must be largest number in the list and so is now in the correct position. We now start a new pass from left to right. The end of the list has been reached so this is the end of the first pass. The twelve at the end of the list must be largest number in the list and so is now in the correct position. We now start a new pass from left to right.
- 8. Bubble Sort Example 6, 2, 9, 11, 9, 3, 7, 122, 6, 9, 11, 9, 3, 7, 122, 6, 9, 9, 11, 3, 7, 122, 6, 9, 9, 3, 11, 7, 122, 6, 9, 9, 3, 7, 11, 12 6, 2, 9, 11, 9, 3, 7, 12 Notice that this time we do not have to compare the last two numbers as we know the 12 is in position. This pass therefore only requires 6 comparisons. Notice that this time we do not have to compare the last two numbers as we know the 12 is in position. This pass therefore only requires 6 comparisons. First Pass Second Pass
- 9. Bubble Sort Example 2, 6, 9, 9, 3, 7, 11, 122, 6, 9, 3, 9, 7, 11, 122, 6, 9, 3, 7, 9, 11, 12 6, 2, 9, 11, 9, 3, 7, 12 2, 6, 9, 9, 3, 7, 11, 12 Second Pass First Pass Third Pass This time the 11 and 12 are in position. This pass therefore only requires 5 comparisons. This time the 11 and 12 are in position. This pass therefore only requires 5 comparisons.
- 10. Bubble Sort Example 2, 6, 9, 3, 7, 9, 11, 122, 6, 3, 9, 7, 9, 11, 122, 6, 3, 7, 9, 9, 11, 12 6, 2, 9, 11, 9, 3, 7, 12 2, 6, 9, 9, 3, 7, 11, 12 Second Pass First Pass Third Pass Each pass requires fewer comparisons. This time only 4 are needed.Each pass requires fewer comparisons. This time only 4 are needed. 2, 6, 9, 3, 7, 9, 11, 12Fourth Pass
- 11. Bubble Sort Example 2, 6, 3, 7, 9, 9, 11, 122, 3, 6, 7, 9, 9, 11, 12 6, 2, 9, 11, 9, 3, 7, 12 2, 6, 9, 9, 3, 7, 11, 12 Second Pass First Pass Third Pass The list is now sorted but the algorithm does not know this until it completes a pass with no exchanges. The list is now sorted but the algorithm does not know this until it completes a pass with no exchanges. 2, 6, 9, 3, 7, 9, 11, 12Fourth Pass 2, 6, 3, 7, 9, 9, 11, 12Fifth Pass
- 12. Bubble Sort Example 2, 3, 6, 7, 9, 9, 11, 12 6, 2, 9, 11, 9, 3, 7, 12 2, 6, 9, 9, 3, 7, 11, 12 Second Pass First Pass Third Pass 2, 6, 9, 3, 7, 9, 11, 12Fourth Pass 2, 6, 3, 7, 9, 9, 11, 12Fifth Pass Sixth Pass 2, 3, 6, 7, 9, 9, 11, 12 This pass no exchanges are made so the algorithm knows the list is sorted. It can therefore save time by not doing the final pass. With other lists this check could save much more work. This pass no exchanges are made so the algorithm knows the list is sorted. It can therefore save time by not doing the final pass. With other lists this check could save much more work.
- 13. Bubble Sort Example Questions 1. Which number is definitely in its correct position at the end of the first pass? Answer: The last number must be the largest. Answer: Each pass requires one fewer comparison than the last. Answer: When a pass with no exchanges occurs. 2. How does the number of comparisons required change as the pass number increases? 3. How does the algorithm know when the list is sorted? 4. What is the maximum number of comparisons required for a list of 10 numbers? Answer: 9 comparisons, then 8, 7, 6, 5, 4, 3, 2, 1 so total 45
- 14. Bubble Sort: Example • Notice that at least one element will be in the correct position each iteration. 40 2 1 43 3 65 0 -1 58 3 42 4 652 1 40 3 43 0 -1 58 3 42 4 65581 2 3 40 0 -1 43 3 42 4 1 2 3 400 65-1 43 583 42 4 1 2 3 4
- 15. 1 0 -1 32 653 43 5842404 Bubble Sort: Example 0 -1 1 2 653 43 58424043 -1 0 1 2 653 43 58424043 6 7 8 1 2 0 3-1 3 40 6543 584245
- 16. Bubble Sort Algorithm #include<iostream> using namespace std; int main(){ //declaring array int array[5]; cout<<"Enter 5 numbers randomly : "<<endl; for(int i=0; i<5; i++) { //Taking input in array cin>>array[i]; } cout<<endl; cout<<"Input array is: "<<endl; for(int j=0; j<5; j++) { //Displaying Array cout<<"tttValue at "<<j<<" Index: "<<array[j]<<endl; } cout<<endl;
- 17. • // Bubble Sort Starts Here int temp; for(int i2=0; i2<=4; i2++) // outer loop { for(int j=0; j<4; j++) //inner loop { //Swapping element in if statement if(array[j]>array[j+1]) { temp=array[j]; array[j]=array[j+1]; array[j+1]=temp; } } } // Displaying Sorted array cout<<" Sorted Array is: "<<endl; for(int i3=0; i3<5; i3++) { cout<<"tttValue at "<<i3<<" Index: "<<array[i3]<<endl; } return 0; }
- 18. DRY RUN OF CODE • size of the array is 5 you can change it with your desired size of array Input array is 5 4 3 2 -5 so values on indexes of array is array[0]= 5 array[1]= 4 array[2]= 3 array[3]= 2 array[4]=-5
- 19. • In nested for loop bubble sort is doing its work outer loop variable is i2 will run form 0 to 4 inner loop variable is j will run from 0 to 3 Note for each i2 value inner loop will run from 0 to 3 like when i2=0 inner loop 0 -> 3 i2=1 inner loop 0 -> 3 i2=2 inner loop 0 -> 3 i2=3 inner loop 0 -> 3 i2=4 inner loop 0 -> 3
- 20. • input 5 4 3 2 -5 for i2= 0; j=0 array[j]>array[j+1] 5 > 4 if condition true here we are swapping 4 and 5 array after 4 5 3 2 -5 j=1 array[j]>array[j+1] 5 > 3 if condition true
- 21. • here we are swapping 3 and 5 array after 4 3 5 2 -5 j=2 array[j]>array[j+1] 5 > 2 if condition true here we are swapping 2 and 5 array after 4 3 2 5 -5 j=3 array[j]>array[j+1] 5 > -5 if condition true
- 22. • here we are swapping -5 and 5 array after 4 3 2 -5 5 first iteration completed
- 23. Bubble Sort: Analysis • Running time: Worst case: O(N2 ) Best case: O(N)
- 24. Selection Sort: Idea 1. We have two group of items: • sorted group, and • unsorted group 1. Initially, all items are in the unsorted group. The sorted group is empty. • We assume that items in the unsorted group unsorted. • We have to keep items in the sorted group sorted.
- 25. Selection Sort: Cont’d 1. Select the “best” (eg. smallest) item from the unsorted group, then put the “best” item at the end of the sorted group. 2. Repeat the process until the unsorted group becomes empty.
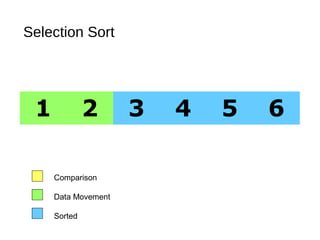
- 26. Selection Sort 5 1 3 4 6 2 Comparison Data Movement Sorted
- 27. Selection Sort 5 1 3 4 6 2 Comparison Data Movement Sorted
- 28. Selection Sort 5 1 3 4 6 2 Comparison Data Movement Sorted
- 29. Selection Sort 5 1 3 4 6 2 Comparison Data Movement Sorted
- 30. Selection Sort 5 1 3 4 6 2 Comparison Data Movement Sorted
- 31. Selection Sort 5 1 3 4 6 2 Comparison Data Movement Sorted
- 32. Selection Sort 5 1 3 4 6 2 Comparison Data Movement Sorted
- 33. Selection Sort 5 1 3 4 6 2 Comparison Data Movement Sorted Largest
- 34. Selection Sort 5 1 3 4 2 6 Comparison Data Movement Sorted
- 35. Selection Sort 5 1 3 4 2 6 Comparison Data Movement Sorted
- 36. Selection Sort 5 1 3 4 2 6 Comparison Data Movement Sorted
- 37. Selection Sort 5 1 3 4 2 6 Comparison Data Movement Sorted
- 38. Selection Sort 5 1 3 4 2 6 Comparison Data Movement Sorted
- 39. Selection Sort 5 1 3 4 2 6 Comparison Data Movement Sorted
- 40. Selection Sort 5 1 3 4 2 6 Comparison Data Movement Sorted
- 41. Selection Sort 5 1 3 4 2 6 Comparison Data Movement Sorted Largest
- 42. Selection Sort 2 1 3 4 5 6 Comparison Data Movement Sorted
- 43. Selection Sort 2 1 3 4 5 6 Comparison Data Movement Sorted
- 44. Selection Sort 2 1 3 4 5 6 Comparison Data Movement Sorted
- 45. Selection Sort 2 1 3 4 5 6 Comparison Data Movement Sorted
- 46. Selection Sort 2 1 3 4 5 6 Comparison Data Movement Sorted
- 47. Selection Sort 2 1 3 4 5 6 Comparison Data Movement Sorted
- 48. Selection Sort 2 1 3 4 5 6 Comparison Data Movement Sorted Largest
- 49. Selection Sort 2 1 3 4 5 6 Comparison Data Movement Sorted
- 50. Selection Sort 2 1 3 4 5 6 Comparison Data Movement Sorted
- 51. Selection Sort 2 1 3 4 5 6 Comparison Data Movement Sorted
- 52. Selection Sort 2 1 3 4 5 6 Comparison Data Movement Sorted
- 53. Selection Sort 2 1 3 4 5 6 Comparison Data Movement Sorted
- 54. Selection Sort 2 1 3 4 5 6 Comparison Data Movement Sorted Largest
- 55. Selection Sort 2 1 3 4 5 6 Comparison Data Movement Sorted
- 56. Selection Sort 2 1 3 4 5 6 Comparison Data Movement Sorted
- 57. Selection Sort 2 1 3 4 5 6 Comparison Data Movement Sorted
- 58. Selection Sort 2 1 3 4 5 6 Comparison Data Movement Sorted
- 59. Selection Sort 2 1 3 4 5 6 Comparison Data Movement Sorted Largest
- 60. Selection Sort 1 2 3 4 5 6 Comparison Data Movement Sorted
- 61. Selection Sort 1 2 3 4 5 6 Comparison Data Movement Sorted DONE!
- 62. 4240 2 1 3 3 4 0 -1 655843 40 2 1 43 3 4 0 -1 42 65583 40 2 1 43 3 4 0 -1 58 3 6542 40 2 1 43 3 65 0 -1 58 3 42 4 Selection Sort: Example
- 63. 4240 2 1 3 3 4 0 655843-1 42-1 2 1 3 3 4 0 65584340 42-1 2 1 3 3 4 655843400 42-1 2 1 0 3 4 655843403 Selection Sort: Example
- 64. 1 42-1 2 1 3 4 6558434030 42-1 0 3 4 6558434032 1 42-1 0 3 4 6558434032 1 420 3 4 6558434032-1 1 420 3 4 6558434032-1 Selection Sort: Example
- 65. Algorithm for Selection Sort void selectionSort(int arr[], int n) { int i, j, minIndex, tmp; for (i = 0; i < n - 1; i++) { minIndex = i; for (j = i + 1; j < n; j++) { if (arr[j] < arr[minIndex]) minIndex = j; } if (minIndex != i) { tmp = arr[i]; arr[i] = arr[minIndex]; arr[minIndex] = tmp; } } }
- 66. Selection Sort: Analysis • Running time: Worst case: O(N2 ) Best case: O(N2 )
- 67. Insertion Sort: Idea • Idea: sorting cards. •8 | 5 9 2 6 3 •5 8 | 9 2 6 3 •5 8 9 | 2 6 3 •2 5 8 9 | 6 3 •2 5 6 8 9 | 3 •2 3 5 6 8 9 |
- 68. Insertion Sort: Idea 1. We have two group of items: • sorted group, and • unsorted group 1. Initially, all items in the unsorted group and the sorted group is empty. • We assume that items in the unsorted group unsorted. • We have to keep items in the sorted group sorted. 1. Pick any item from, then insert the item at the right position in the sorted group to maintain sorted property. 2. Repeat the process until the unsorted group becomes empty.
- 69. 40 2 1 43 3 65 0 -1 58 3 42 4 2 40 1 43 3 65 0 -1 58 3 42 4 1 2 40 43 3 65 0 -1 58 3 42 4 40 Insertion Sort: Example
- 70. 1 2 3 40 43 65 0 -1 58 3 42 4 1 2 40 43 3 65 0 -1 58 3 42 4 1 2 3 40 43 65 0 -1 58 3 42 4 Insertion Sort: Example
- 71. 1 2 3 40 43 65 0 -1 58 3 42 4 1 2 3 40 43 650 -1 58 3 42 4 1 2 3 40 43 650 58 3 42 41 2 3 40 43 650-1 Insertion Sort: Example
- 72. 1 2 3 40 43 650 58 3 42 41 2 3 40 43 650-1 1 2 3 40 43 650 58 42 41 2 3 3 43 650-1 5840 43 65 1 2 3 40 43 650 42 41 2 3 3 43 650-1 5840 43 65 Insertion Sort: Example 1 2 3 40 43 650 421 2 3 3 43 650-1 584 43 6542 5840 43 65
- 73. Algorithm for Insertion Sort int a[6] = {5, 1, 6, 2, 4, 3}; int i, j, key; for(i=1; i<6; i++) { key = a[i]; j = i-1; while(j>=0 && key < a[j]) { a[j+1] = a[j]; j--; } a[j+1] = key; }
- 74. Insertion Sort: Analysis • Running time analysis: Worst case: O(N2 ) Best case: O(N)
- 75. Mergesort •Mergesort (divide-and-conquer) • Divide array into two halves. A L G O R I T H M S divideA L G O R I T H M S
- 76. Mergesort •Mergesort (divide-and-conquer) • Divide array into two halves. • Recursively sort each half. sort A L G O R I T H M S divideA L G O R I T H M S A G L O R H I M S T
- 77. Mergesort •Mergesort (divide-and-conquer) • Divide array into two halves. • Recursively sort each half. • Merge two halves to make sorted whole. merge sort A L G O R I T H M S divideA L G O R I T H M S A G L O R H I M S T A G H I L M O R S T
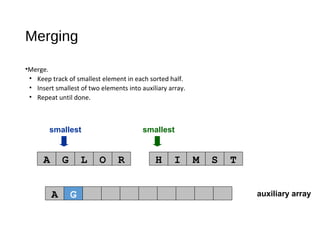
- 78. auxiliary array smallest smallest A G L O R H I M S T Merging •Merge. • Keep track of smallest element in each sorted half. • Insert smallest of two elements into auxiliary array. • Repeat until done. A
- 79. auxiliary array smallest smallest A G L O R H I M S T A Merging •Merge. • Keep track of smallest element in each sorted half. • Insert smallest of two elements into auxiliary array. • Repeat until done. G
- 80. auxiliary array smallest smallest A G L O R H I M S T A G Merging •Merge. • Keep track of smallest element in each sorted half. • Insert smallest of two elements into auxiliary array. • Repeat until done. H
- 81. auxiliary array smallest smallest A G L O R H I M S T A G H Merging •Merge. • Keep track of smallest element in each sorted half. • Insert smallest of two elements into auxiliary array. • Repeat until done. I
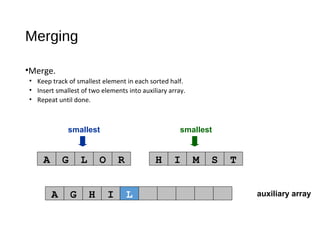
- 82. auxiliary array smallest smallest A G L O R H I M S T A G H I Merging •Merge. • Keep track of smallest element in each sorted half. • Insert smallest of two elements into auxiliary array. • Repeat until done. L
- 83. auxiliary array smallest smallest A G L O R H I M S T A G H I L Merging •Merge. • Keep track of smallest element in each sorted half. • Insert smallest of two elements into auxiliary array. • Repeat until done. M
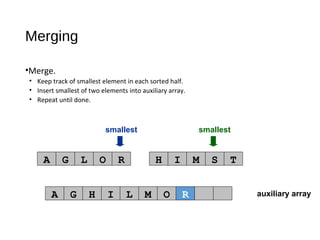
- 84. auxiliary array smallest smallest A G L O R H I M S T A G H I L M Merging •Merge. • Keep track of smallest element in each sorted half. • Insert smallest of two elements into auxiliary array. • Repeat until done. O
- 85. auxiliary array smallest smallest A G L O R H I M S T A G H I L M O Merging •Merge. • Keep track of smallest element in each sorted half. • Insert smallest of two elements into auxiliary array. • Repeat until done. R
- 86. auxiliary array first half exhausted smallest A G L O R H I M S T A G H I L M O R Merging •Merge. • Keep track of smallest element in each sorted half. • Insert smallest of two elements into auxiliary array. • Repeat until done. S
- 87. auxiliary array first half exhausted smallest A G L O R H I M S T A G H I L M O R S Merging •Merge. • Keep track of smallest element in each sorted half. • Insert smallest of two elements into auxiliary array. • Repeat until done. T
- 88. Procedure of Merge Sort Assume, that both arrays are sorted in ascending order and we want resulting array to maintain the same order. Algorithm to merge two arrays A[0..m-1] and B[0..n-1] into an array C[0..m+n-1] is as following: i.Introduce read-indices i, j to traverse arrays A and B, accordingly. Introduce write-index k to store position of the first free cell in the resulting array. By default i = j = k = 0. ii.At each step: if both indices are in range (i < m and j < n), choose minimum of (A[i], B[j]) and write it to C[k]. Otherwise go to step 4. iii.Increase k and index of the array, algorithm located minimal value at, by one. Repeat step 2. iv.Copy the rest values from the array, which index is still in range, to the resulting array.
- 89. Merge Sort Algorithm // m - size of A // n - size of B // size of C array must be equal or greater than // m + n void merge(int m, int n, int A[], int B[], int C[]) { int i, j, k; i = 0; j = 0; k = 0;
- 90. Merge Sort Algorithm Cont.. while (i < m && j < n) { if (A[i] <= B[j]) { C[k] = A[i]; i++; } else { C[k] = B[j]; j++; } k++; }
- 91. Merge Sort Algorithm Cont.. if (i < m) { for (int p = i; p < m; p++) { C[k] = A[p]; k++; } } else { for (int p = j; p < n; p++) { C[k] = B[p]; k++; } } }
- 92. Enhancement • Algorithm could be enhanced in many ways. For instance, it is reasonable to check, if A[m - 1] < B[0] or B[n - 1] < A[0]. • In any of those cases, there is no need to do more comparisons. • Algorithm could just copy source arrays in the resulting one in the right order. • More complicated enhancements may include searching for interleaving parts and run merge algorithm for them only. It could save up much time, when sizes of merged arrays differ in scores of times.
- 93. Time Complexity • Worst Case Time Complexity : O(n log n) • Best Case Time Complexity : O(n log n) • Average Time Complexity : O(n log n) • Time complexity of Merge Sort is O(n Log n) in all 3 cases (worst, average and best) as merge sort always divides the array in two halves and take linear time to merge two halves.