1. Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-1
Tasks, Functions, and UDPs
Dr. Vasudeva
2. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-2
Objectives
After completing this chapter, you will be able to:
Describe the features of tasks and functions
Describe how to use tasks and functions
Describe the features of dynamic tasks and functions
Describe the features of UDPs (user-defined primitives)
Describe how to use combinational and sequential UDPs
3. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-3
Tasks and Functions (p. 145 in LRM)
Tasks and functions provide the ability to reuse the common
piece of code from several different places in a design.
Comparison of tasks and functions
Item Tasks Functions
Arguments
May have zero or more input,
output, and inout.
At least one input, and cannot
have output and inout.
Return value
May have multiple values via
output and inout.
Only a single value via
function name.
Timing control statements Yes No
Execution In non-zero simulation time. In 0 simulation time.
Invoke functions/tasks Functions and tasks. Functions only.
4. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-4
When to Use Tasks
Tasks are declared with the keywords task and endtask.
When to use tasks if the procedure
has delay or timing control constructs.
has at least one output arguments.
has no input argument.
5. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-5
Task Definition and Calls
// port list style
task [automatic] task_identifier;
[declarations] // include arguments
procedural_statement
endtask
// port list declaration style
task [automatic] task_identifier ([argument_declarations]);
[other_declarations] // exclude arguments
procedural_statement
endtask
task [automatic] task_identifier(task_port_list); … endtask
6. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-6
Types of Tasks
Types of tasks
(static) task: declared with task … endtask.
automatic (reentrant, dynamic) task: declared with task automatic
… endtask.
Features of static tasks
All declared items are statically allocated.
Static tasks items can be shared across all uses of the task
executing concurrently within a module.
Features of automatic (reentrant, dynamic) tasks
All declared items are dynamically allocated for each invocation.
They are deallocated at the end of the task invocation
7. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-7
// an example illustrating how to count the zeros in a
byte. module zero_count_task (data, out);
input [7:0] data;
output reg [3:0] out; // output declared as register
always @(data)
count_0s_in_byte(data, out);
// task declaration from here.
task count_0s_in_byte(input [7:0] data, output reg [3:0] count);
integer i;
begin // task
body count = 0;
for (i = 0; i <= 7; i
= i + 1)
if (data[i] == 0) count= count + 1;
end endtask
endmodule
A Task Example
8. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-8
A Dynamic Task Example
// task definition starts from here
task automatic check_counter;
reg [3:0] count;
// the body of the task
begin
$display ($realtime,,"At the beginning of task, count = %d",
count); if (reset) begin
count = 0;
$display ($realtime,,"After reset, count = %d", count);
end
endmodule
9. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-9
When to Use Functions
Functions are declared with the keywords function and
endfunction.
When to use functions if the procedure
has no delay or timing control constructs (any
statement introduced with #, @, or wait).
returns a single value.
has at least one input argument.
has no output or inout arguments.
has no nonblocking assignments.
10. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-10
Function Definition and Calls
// port list style
function [automatic] [signed] [range_or_type] function_identifier;
input_declaration
other_declarations
procedural_statement
endfunction
// port list declaration
style
function [automatic] [signed] [range_or_type] function_identifier (input_declarations);
other_declarations
procedural_statement
endfunction
function [automatic] [signed] [range_of_type] … endfunction
11. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-11
Types of Functions
Features of (static) functions
All declared items are statically allocated.
Features of automatic (recursive, dynamic) functions
All function items are allocated dynamically for each recursive call.
Automatic function items cannot be accessed by
hierarchical references.
Automatic functions can be invoked through use of their
hierarchical name.
12. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-12
A Function Example
// an example illustrating how to count the zeros in a
byte. module zero_count_function (data, out);
input [7:0] data;
output reg [3:0] out; // output declared as
register always @(data)
out = count_0s_in_byte(data);
// function declaration from
here.
function [3:0] count_0s_in_byte(input [7:0] data);
integer i;
begin
count_
0s_in_
byte =
0;
for (i =
0; i <=
7; i = i
+ 1)
//
the
13. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-13
Automatic (Recursive) Functions
// to illustrate the use of reentrant function
module factorial(input [7:0] n, output [15:0] result);
// instantiate the fact function
assign result = fact(7);
/
/
d
e
f
i
n
e
f
a
c
t
14. Chapter 5: Tasks, Functions, and UDPs
Constant Functions
function integer count_log_b2(input integer depth);
begin //
function body
count_log_b2 = 0;
while (depth) begin
count_log_b2 = count_log_b2 + 1;
depth = depth >> 1;
end
end
endfunction
endmodule
Constant function calls are evaluated at elaboration
time.
module RAM (addr_bus, data_bus);
parameter RAM_depth = 1024;
localparam M=count_log_b2(RAM_depth);
input [M-1:0] addr_bus;
output reg [7:0] data_bus;
…
// function declaration from here
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-14
15. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-15
Elaboration time (p. 197 in LRM)
Elaboration is the process that occurs between parsing and simulation.
It binds the modules to module instances, builds the model hierarchy,
computes parameter values, resolves hierarchical names, establishes
net connectivity, and prepares all of this for simulation.
16. Chapter 5: Tasks, Functions, and UDPs
An Architecture of HDL Simulators
Parsing
Elaboration
Analysis
Optimization
Simulation engine
Code generation
Simulation control
User
Back
Front
end
end
RTL code (source)
Results
Compiler
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-16
17. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-17
System tasks and functions (p. 277 in LRM)
Display system tasks: $display, $write, $monitor, $strobe
Timescale system tasks: $printtimescale, $timeformat
Simulation time system tasks: $time, $realtime
Simulation control system tasks: $stop, $finish
File I/O system tasks: $fopen, $fclose
String formatting system tasks: $swrite, $sformat
Conversion system tasks: $singed, $unsigned, $rtoi,
$itor
Probablistic distribution system functions
Stochastic analysis system tasks
Command line input: $test$plusargs, $value$plusargs
PLA modeling system tasks
18. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-18
User Defined Primitives
Two types
Combinational UDPs
are defined where the output is solely determined by
the combination of the inputs.
Sequential UDPs
are defined where the output is determined by
the combination of the current output and the
inputs.
19. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-19
UDP Basics
// port list style
primitive udp_name(output_port,
input_ports); output output_port;
input input_ports;
reg output_port; // only for sequential UDP
initial output-port = expression; //only for sequential UDP
table // define the behavior of
UDP
<table rows>
endtable
endprimitive
20. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-20
UDP Basics
// port list declaration style
primitive udp_name(output output_port, input input_ports);
reg output_port; // only for sequential
UDP initial output-port = expression; //only for
sequential UDP
table // define the behavior of
UDP
<table rows>
endtable
endprimitive
21. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-21
Basic UDP Rules
Inputs
can have scalar inputs.
can have multiple inputs.
are declared with input.
Output
can have only one scalar output.
must appear in the first terminal list.
is declared with the keyword output.
must also be declared as a reg in sequential
UDPs.
UDPs
do not support inout ports.
are at the same level as modules.
are instantiated exactly like gate primitives.
22. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-22
Definition of Combinational UDPs
// port list style
primitive udp_name(output_port,
input_ports); output output_port;
input input_ports;
// UDP state table
table // the state table
starts from here
<table rows>
endtable
endprimitive
23. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-23
Definition of Combinational UDPs
State table entries
<input1><input2>……<inputn> : <output>;
The <input#> values appear in a state table entry must
be in the same order as in the input list.
Inputs and output are separated by a “:”.
A state entry ends with a “;”.
All possible combinations of inputs must be specified
to avoid unknown output value.
24. Chapter 5: Tasks, Functions, and UDPs
A Primitive UDP --- An AND Gate
// primitive name and terminal
list primitive udp_and(out, a, b);
// declarations
output out; // must not be declared as reg for combinational
UDP input a, b; // declarations for inputs.
table
// a b :
0 0 :
0 1 :
1 0 :
1 1 :
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-24
endtable
// state table definition; starts with keyword
table out;
0;
0;
0;
1;
// end state table definition
endprimitive // end of udp_and definition
25. Chapter 5: Tasks, Functions, and UDPs
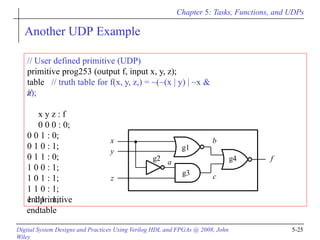
Another UDP Example
x
y
z
f
a
b
c
g1
g2
g3
g4
// User defined primitive (UDP)
primitive prog253 (output f, input x, y, z);
table // truth table for f(x, y, z,) = ~(~(x | y) | ~x &
z);
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-25
//
x y z : f
0 0 0 : 0;
0 0 1 : 0;
0 1 0 : 1;
0 1 1 : 0;
1 0 0 : 1;
1 0 1 : 1;
1 1 0 : 1;
1 1 1 : 1;
endtable
endprimitive
26. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-26
Shorthand Notation for Don’t Cares
// an example of combinational
UDPs. primitive udp_and(f, a, b);
output f;
input a, b;
table
// a b : f;
1 1 : 1;
0 ? : 0;
? 0 : 0;// ? expanded to 0, 1, x
endtable
endprimitive
27. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-27
Shorthand Symbols for Using in UDPs
Symbols Meaning Explanation
? 0, 1, x Cannot be specified in an output field
b 0, 1 Cannot be specified in an output field
- No change in state value Can use only in a sequential UDP output field
r (01) Rising edge of a signal
f (10) Falling edge of a signal
p (01), (0x), or (x1) Potential rising edge of a signal
n (10), (1x), or (x0) Potential falling edge of a signal
* (??) Any value change in signal
28. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-28
Instantiation of Combinational UDPs
// an example illustrates the instantiations of
UDPs. module UDP_full_adder(sum, cout, x, y,
cin); output sum, cout;
input x, y, cin;
wire s1, c1, c2;
// instantiate udp primitives
udp_xor (s1, x, y);
udp_and (c1, x, y);
udp_xor (sum, s1, cin);
udp_and (c2, s1, cin);
udp_or (cout, c1, c2);
endmodule
Some synthesizers might not
synthesize UDPs.
29. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-29
Definition of Sequential UDPs
// port list style
primitive udp_name(output_port,
input_ports); output output_port;
input input_ports;
reg output_port; // unique for sequential UDP
initial output-port = expression; // optional for sequential
UDP
// UDP state table
table // keyword to start the state table
<table rows>
endtable
endprimitive
30. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-30
Definition of Sequential UDPs
State table entries
The output is always declared as a reg.
An initial statement can be used to initialize output.
Inputs, current state, and next state are separated by
a colon “:”.
The input specification can be input levels or
edge transitions.
All possible combinations of inputs must be specified
to avoid unknown output value.
<input1><input2>……<inputn> : <current_state> : <next_state>;
31. Chapter 5: Tasks, Functions, and UDPs
Level-Sensitive Sequential UDPs
// define a level-sensitive latch using UDP.
primitive d_latch(q, d, gate, clear);
output q;
input d, gate, clear;
reg q;
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-31
initial q = 0; // initialize output
q
//state table
table
// d gate clear : q : q+;
? ? 1 : ? : 0 ; // clear
1 1 0 : ? : 1 ; // latch q = 1
0 1 0 : ? : 0 ; // latch q = 0
? 0 0 : ? : - ; // no state change
endtable
endprimitive
32. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-32
Edge-Sensitive Sequential UDPs
// define a positive-edge triggered T-type flip-flop using
UDP. primitive T_FF(q, clk, clear);
output q;
input clk, clear;
reg q;
// define the behavior of edge-triggered
T_FF table
// clk clear : q : q+;
? 1 : ? : 0 ; // asynchronous
clear
?
(10) : ? : - ; // ignore negative edge of clear
0 : 1 : 0 ; // toggle at positive
edge 0 : 0 : 1 ; // of clk
(01)
(01)
(1?) 0 : ? : - ; // ignore negative edge of
clk
endtable
endprimitive
33. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-33
Instantiation of UDPs
// an example of sequential UDP
instantiations module ripple_counter(clock,
clear, q);
input clock,
clear; output [3:0]
q;
// instantiate the T_FFs.
T_FF tff0(q[0], clock, clear);
T_FF tff1(q[1], q[0], clear);
T_FF tff2(q[2], q[1], clear);
T_FF tff3(q[3], q[2], clear);
endmodule
34. Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-34
Guidelines for UDP Design
UDPs model functionality only; they do not model
timing or process technology.
A UDP has exactly one output terminal and is implemented
as a lookup table in memory.
UDPs are not the appropriate method to design a block
because they are usually not accepted by synthesis
tools.
The UDP state table should be specified as completely
as possible.
One should use shorthand symbols to combine table entries
wherever possible.




![Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-5
Task Definition and Calls
// port list style
task [automatic] task_identifier;
[declarations] // include arguments
procedural_statement
endtask
// port list declaration style
task [automatic] task_identifier ([argument_declarations]);
[other_declarations] // exclude arguments
procedural_statement
endtask
task [automatic] task_identifier(task_port_list); … endtask](https://image.slidesharecdn.com/udps-250318042226-d664ad53/85/Tasks-functions-and-User-Defined-Programss-pptx-5-320.jpg)

![Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-7
// an example illustrating how to count the zeros in a
byte. module zero_count_task (data, out);
input [7:0] data;
output reg [3:0] out; // output declared as register
always @(data)
count_0s_in_byte(data, out);
// task declaration from here.
task count_0s_in_byte(input [7:0] data, output reg [3:0] count);
integer i;
begin // task
body count = 0;
for (i = 0; i <= 7; i
= i + 1)
if (data[i] == 0) count= count + 1;
end endtask
endmodule
A Task Example](https://image.slidesharecdn.com/udps-250318042226-d664ad53/85/Tasks-functions-and-User-Defined-Programss-pptx-7-320.jpg)
![Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-8
A Dynamic Task Example
// task definition starts from here
task automatic check_counter;
reg [3:0] count;
// the body of the task
begin
$display ($realtime,,"At the beginning of task, count = %d",
count); if (reset) begin
count = 0;
$display ($realtime,,"After reset, count = %d", count);
end
endmodule](https://image.slidesharecdn.com/udps-250318042226-d664ad53/85/Tasks-functions-and-User-Defined-Programss-pptx-8-320.jpg)

![Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-10
Function Definition and Calls
// port list style
function [automatic] [signed] [range_or_type] function_identifier;
input_declaration
other_declarations
procedural_statement
endfunction
// port list declaration
style
function [automatic] [signed] [range_or_type] function_identifier (input_declarations);
other_declarations
procedural_statement
endfunction
function [automatic] [signed] [range_of_type] … endfunction](https://image.slidesharecdn.com/udps-250318042226-d664ad53/85/Tasks-functions-and-User-Defined-Programss-pptx-10-320.jpg)

![Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-12
A Function Example
// an example illustrating how to count the zeros in a
byte. module zero_count_function (data, out);
input [7:0] data;
output reg [3:0] out; // output declared as
register always @(data)
out = count_0s_in_byte(data);
// function declaration from
here.
function [3:0] count_0s_in_byte(input [7:0] data);
integer i;
begin
count_
0s_in_
byte =
0;
for (i =
0; i <=
7; i = i
+ 1)
//
the](https://image.slidesharecdn.com/udps-250318042226-d664ad53/85/Tasks-functions-and-User-Defined-Programss-pptx-12-320.jpg)
![Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-13
Automatic (Recursive) Functions
// to illustrate the use of reentrant function
module factorial(input [7:0] n, output [15:0] result);
// instantiate the fact function
assign result = fact(7);
/
/
d
e
f
i
n
e
f
a
c
t](https://image.slidesharecdn.com/udps-250318042226-d664ad53/85/Tasks-functions-and-User-Defined-Programss-pptx-13-320.jpg)
![Chapter 5: Tasks, Functions, and UDPs
Constant Functions
function integer count_log_b2(input integer depth);
begin //
function body
count_log_b2 = 0;
while (depth) begin
count_log_b2 = count_log_b2 + 1;
depth = depth >> 1;
end
end
endfunction
endmodule
Constant function calls are evaluated at elaboration
time.
module RAM (addr_bus, data_bus);
parameter RAM_depth = 1024;
localparam M=count_log_b2(RAM_depth);
input [M-1:0] addr_bus;
output reg [7:0] data_bus;
…
// function declaration from here
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-14](https://image.slidesharecdn.com/udps-250318042226-d664ad53/85/Tasks-functions-and-User-Defined-Programss-pptx-14-320.jpg)

















![Chapter 5: Tasks, Functions, and UDPs
Digital System Designs and Practices Using Verilog HDL and FPGAs @ 2008, John
Wiley
5-33
Instantiation of UDPs
// an example of sequential UDP
instantiations module ripple_counter(clock,
clear, q);
input clock,
clear; output [3:0]
q;
// instantiate the T_FFs.
T_FF tff0(q[0], clock, clear);
T_FF tff1(q[1], q[0], clear);
T_FF tff2(q[2], q[1], clear);
T_FF tff3(q[3], q[2], clear);
endmodule](https://image.slidesharecdn.com/udps-250318042226-d664ad53/85/Tasks-functions-and-User-Defined-Programss-pptx-33-320.jpg)
