














![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
A design of 3-bit RCA using instantiation of three FAs
a[0]
1 1
b[0] a[1]
1 1
b[1] a[2]
1 1
b[2]
a
b 3
1
carry[0] carry[1]
sum[0] sum[1] sum[2]
sum 3
cout
1
cin
3
fa0
FA
fa1
FA
fa2
FA
16](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-16-320.jpg)
![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Verilog module for a 3-bit RCA
module RCA(
input [2:0] a, b,
input c_in,
output [2:0] sum,
output c_out);
wire carry[1:0];
// module instantiation
FA fa0(a[0], b[0], c_in,
sum[0], carry[0]);
FA fa1(a[1], b[1], carry[0],
sum[1], carry[1]);
FA fa2(a[2], b[2], carry[1],
sum[2], c_out);
endmodule
module RCA(
input [2:0] a, b,
input c_in,
output [2:0] sum,
output c_out);
wire carry[1:0];
// module instantiation
FA fa0(.a(a[0]),.b( b[0]), .c_in(c_in),
.sum(sum[0]),.c_out(carry[0]));
FA fa1(.a(a[1]), .b(b[1]),
.c_in(carry[0]), .sum(sum[1]),
.c_out(carry[1]));
FA fa2(.a(a[2]), .b(b[2]), .c_in(carry[1]),
.sum(sum[2]), .c_out(c_out));
endmodule
(a) (b)
(a) Port connections following the order of ports definition
in the FA module
17
(b) Port connections using names](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-17-320.jpg)










![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Variable Declaration
Declaring a net, signed or unsigned
wire [<signed>] [<range>] <net_name> [<net_name>*];
Range is specified as [MSB:LSB]. Default is one bit wide
Declaring a register
reg [<signed>] [<range>] <reg_name> [<reg_name>*];
Declaring memory
reg [<range>] <memory_name> [<start_addr> :
<end_addr>];
Examples
reg r; // 1-bit reg variable
wire x1, x2; // 2 1-bit wire variable
reg signed [7:0] y_reg; // 8-bit sign register
reg [7:0] ram_mem [0:1023]; //a 1 KB memory
28](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-28-320.jpg)









![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Conditional Operator
out = sel ? a : b;
if(sel)
out = a;
else
out = b;
This statement is equivalent to following decision logic.
Conditional operator can also be used to infer higher order multiplexers. The code
here infers 4:1 multiplexer.
out = sel[1] ? ( sel[0] ? in3 : in2 ) : ( sel[0] ? in1 : in0 );
38](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-38-320.jpg)
![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
MSB LSB
p 13 bits
p={a[3:0], b[2:0], 3'b111, c[2:0]};
Example of Concatenation Operator
40](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-40-320.jpg)







![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Example: Reduction Operator
Apply & reduction operator on a 4-bit number
A=4′b1011
assign out = &A;
This operation is equivalent to performing a bit-
wise & operation on all the bits of A i.e.
out = A[0] & A[1] & A[2] & A[3];
50](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-50-320.jpg)
![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Data Flow Modeling: Continuous Assignment
Continually drive wire variables
Model combinational logic
module adder_4 (a, b, ci, s, co);
input [3:0] a, b;
input ci;
output [3:0] s;
output co;
assign {co, s} = a + b + ci;
endmodule
51](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-51-320.jpg)
















![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Conditional Execution: case statement
module mux4_1(in1, in2, in3, in4, sel, out);
input [1:0] sel;
input [15:0] in1, in2, in3, in3;
output [15:0] out;
reg [15:0] out;
always @(*)
case (sel)
2'b00: out = in1;
2'b01: out = in2;
2'b10: out = in3;
2'b11: out = in4;
default: out = 16'bx;
endcase
endmodule
Like C and other high-level programming languages, Verilog supports
switch and case statements for multi-way decision support.
71](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-71-320.jpg)


![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
RTL Coding Guideline: Avoid Latches in the Design
A latch is a storage device that stores a value without the
use of a clock.
Latches are technology-specific and must be avoided in
synchronous designs
To avoid latches adhere to coding guidelines
fully specify assignments or use a default assignment
out_b is not assigned any value under
else, the synthesis tool will infer a latch
input [1:0] sel;
reg [1:0] out_a, out_b;
always @ (*)
begin
if (sel == 2’b00)
begin
out_a = 2’b01;
out_b = 2’b10;
end
else
out_a = 2’b01;
end
74](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-74-320.jpg)
![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Avoiding Latches
Use default assignments
input [1:0] sel;
reg [1:0] out_a, out_b;
always @ (*)
begin
out_a = 2’b00;
out_b = 2’b00;
if (sel=2’b00)
begin
out_a = 2’b01;
out_b = 2’b10;
end
else
out_a = 2’b01;
end
75](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-75-320.jpg)
![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Avoid Latches
input [1:0] sel;
reg [1:0] out_a, out_b;
always @*
begin
out_a = 2’b00;
out_b = 2’b00;
if (sel==2’b00)
begin
out_a = 2’b01;
out_b = 2’b10;
end
else if (sel == 2’b01)
out_a = 2’b01;
end
All conditions to be checked
For if block there must be an else
For case, either check all conditions or use a default
always @*
begin
out_a = 2’b00;
out_b = 2’b00;
if (sel==2’b00)
begin
out_a = 2’b01;
out_b = 2’b10;
end
else if (sel == 2’b01)
out_a = 2’b01;
else
out_a = 2’b00;
end
76](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-76-320.jpg)






![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
module irr(
input signed [15:0] x,
input clk, rst_n,
output reg signed [31:0] y);
reg signed [31:0] y_reg;
always @(*)
y =(y_reg>>>1) + x; // combinational logic
always @(posedge clk or negedge rst_n) // sequential logic
begin
if (!rst_n)
y_reg <= 0;
else
y_reg <= y;
end
endmodule
The RTL Verilog code implementing a single tap IIR filter
y[n]=0.5y[n-1]+x[n]
Example
83](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-83-320.jpg)
![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Stimulus for the IIR filter design module
module stimulus_irr;
reg [15:0] X;
reg CLK, RST_N;
wire [31:0] Y;
integer i;
irr IRR0(X, CLK, RST_N, Y);
initial
begin
CLK = 0;
#5 RST_N = 0;
#2 RST_N = 1;
end
initial
begin
X = 0;
for(i=0; i<10; i=i+1)
#20 X = X + 1;
$finish;
end
always
#10 CLK = ~CLK;
initial
$monitor($time, " X=%d, sum=%d,
Y=%d", X, IRR0.y, Y);
initial
begin
#60 $stop;
end
endmodule
84](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-84-320.jpg)


![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Usefulness of parameterized model
module adder (a, b, c_in, sum, c_out);
parameter SIZE = 4;
input [SIZE-1: 0] a, b;
output [SIZE-1: 0] sum;
input c_in;
output c_out;
assign {c_out, sum} = a + b + c_in;
endmodule
Parameters are constants
A parameter is assigned a default value in the module
For every instance of this module it can be assigned a
different value
87](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-87-320.jpg)
![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Same module declaration using ANSI style port listing
module adder
#(parameter SIZE = 4)
(input [SIZE-1: 0] a, b,
output [SIZE-1: 0] sum,
input c_in,
output c_out);
88](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-88-320.jpg)
![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Instantiation of the module for adding 8-bit
inputs in1 and in2
module stimulus;
reg [7:0] in1, in2;
wire [7:0] sum_byte;
reg c_in;
wire c_out;
adder #8 add_byte (in1, in2, c_in, sum_byte, c_out);
.
.
endmodule
89](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-89-320.jpg)

![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Parameterized code
module adder
#(parameter SIZE1 = 4, SIZE2=6)
(input [SIZE1-1: 0] a,
Input [SIZE2-1: 0] b,
output [SIZE2-1: 0] sum,
input c_in,
output c_out);
91](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-91-320.jpg)





![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Example: Task
module RCA(
input [3:0] a, b,
input c_in,
output reg c_out,
output reg [3:0] sum
);
reg carry[4:0];
integer i;
task FA(
input in1, in2, carry_in,
output reg out, carry_out);
{carry_out, out} = in1 + in2 + carry_in;
endtask
always@*
begin
carry[0]=c_in;
for(i=0; i<4; i=i+1)
begin
FA(a[i], b[i], carry[i], sum[i], carry[i+1]);
end
c_out = carry[4];
end
endmodule
97](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-97-320.jpg)

![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Functions template
Syntax:
function_declaration
function [range or type] function_identifier;
function_call
function_identifier (expression {, expression})
99](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-99-320.jpg)
![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Example: Function
module MUX4to1(
input [3:0] in,
input [1:0] sel,
output out);
wire out1, out2;
function MUX2to1;
input in1, in2;
input select;
assign MUX2to1 = select ? in2:in1;
endfunction
assign out1 = MUX2to1(in[0], in[1], sel[0]);
assign out2 = MUX2to1(in[2], in[3], sel[0]);
assign out = MUX2to1(out1, out2, sel[1]);
endmodule
module testFunction;
reg [3:0] IN;
reg [1:0] SEL;
wire OUT;
MUX4to1 mux(IN, SEL, OUT);
initial
begin
IN = 1;
SEL = 0;
#5 IN = 7;
SEL = 0;
#5 IN = 2; SEL=1;
#5 IN = 4; SEL = 2;
#5 IN = 8; SEL = 3;
end
initial
$monitor($time, " %b %b %bn", IN, SEL, OUT);
endmodule 100](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-100-320.jpg)






![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Additional data types in SystemVerilog
Data Type Description States Example
logic User defined 4 states 0,1, x ,z logic [15:0] a,b;
int 32 bit signed 2 states 0,1 int num;
bit User defined 2 states 0,1 bit [5:0] in;
byte 8 bit signed 2 states 0,1 byte t;
longint 64 bit signed 2 states 0,1 longint p;
shortint 16 bit signed 2 states 0,1 shortint q;
108](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-108-320.jpg)
![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Packed & unpacked 1-D and 2-D arrays
bit up_data [15:0];
bit [31:0] up_mem [0:511];
bit [15:0] p_data;
bit [31:0][0:511] p_mem1, p_mem2;
slice_data = up_mem [2][31:15]; // most significant byte at mem location 2
add_mem = p_mem1 + p_mem2;
bit [15:0] array[];
array = new[1023];
SV can operate on an entire two-dimensional (2-D) array of packed data
Unpacked arrays can be operated only on an indexed value
Dynamic arrays can also be declared as
110](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-110-320.jpg)

![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
C/C++ like Constructs
• typedef, struct and enum
typedef bit [15:0] addr;
typedef struct {
addr src;
addr dst;
bit [31:0] data;
} packet_tcp;
module packet ( input packet_tcp packet_in,
input clk,
output packet_tcp packet_out);
always_ff @(posedge clk)
begin
packet_out.dst <= packet_in.src;
packet_out.src <= packet_in.dst;
packet_out.data <= ~packet_in.data;
end
endmodule
112](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-112-320.jpg)
![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Enum
typedef enum logic [2:0]
{ idle = 0,
read = 3,
dec, // = 4
exe
} states;
states pipes;
The enum can also be directly defined as
enum {idle, read=3, dec, exe} pipes;
case (pipes)
idle: pc = pc;
read: pc = pc+1;
.
.
endcase
113](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-113-320.jpg)


![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Procedural Block: always
module adder(input signed [3:0] in1, in2,
input clk, rst_n,
output logic signed [15:0] acc);
logic signed [15:0] sum;
// combinational block
always_comb
begin: adder
sum = in1 + in2 + acc;
end: adder
// sequential block
always_ff @(posedge clk or negedge rst_n)
if (!rst_n)
acc <= 0;
else
acc <= sum;
endmodule
always_comb , always_latch and always_ff
SV solves the issue of sensitivity list
116](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-116-320.jpg)




![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Nested Modules
module accumulator(input clk, rst_n, input [7:0] data, output bit [15:0] acc);
always_ff @ (posedge clk)
begin
if (!rst_n)
acc <= 0;
else
acc <= acc + data;
end
endmodule
logic clk=0;
always #1 clk = ~clk;
logic rst_n;
logic [7:0] data;
logic [15:0] acc_reg;
accumulator acc_inst(clk, rst_n, data, acc_reg);
initial
begin
rst_n = 0;
#10 rst_n = 1;
data = 2;
#200 $finish;
end
initial
$monitor($time, "%d, %dn", data, acc_reg);
endmodule
121](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-121-320.jpg)




![interface local_bus(input logic clk);
bit rqst;
bit grant;
bit rw;
bit [4:0] addr;
wire [7:0] data;
modport tx (input grant,
output rqst, addr,rw,
inout data,
input clk);
modport rx (output grant,
input rqst, addr, rw,
inout data,
input clk);
endinterface
module src (input bit , clk,
local_bus.tx busTx);
integer i;
logic [7:0] value = 0;
assign busTx.data = value;
initial
begin
busTx.rw = 1;
for (i=0; i<32; i++)
begin
126](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-126-320.jpg)
![#2 busTx.addr = i;
value += 1;
end
busTx.rw = 0;
end
// rest of the modules detail here
endmodule
module dst ( input bit clk,
local_bus.rx busRx);
logic [7:0] local_mem [0:31];
always @(posedge clk)
if (busRx.rw)
local_mem[busRx.addr] = busRx.data;
endmodule
// In the top-level module these modules are instantiated with interface declaration.
module local_bus_top;
logic clk = 0;
local_bus bus(clk); // the interface declaration
always #1 clk = ~clk;
src SRC (clk, bus.tx);
dst DST (clk, bus.rx);
initial
$monitor ($time, "t%d %d %d %dn", bus.rx.rw, bus.rx.addr, bus.rx.data, DST.local_mem[bus.rx.addr]);
endmodule
127](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-127-320.jpg)

![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Classes
class frame{
byte dst_addr;
bit [3:0] set_frame_type;
data_struct payload;
function byte get_src_addr ()
return src_addr;
endfunction
extern task assign_dst_addr_type (input byte addr, input bit[3:0] type);
endclass
task frame::assign_dst_addr(input byte addr, input bit [3:0] type);
dst_addr = addr;
frame_type = type;
endtask
129](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-129-320.jpg)
![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
frame first_frame = new;
A class constructor can also be used to initialize data as
class frame{
.
.
function new (input byte addr, input [3:0] type)
dst_addr = addr;
frame_type = type;
endfunction
.
.
endclass
130](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-130-320.jpg)
![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
frame msg_frame = new(8’h00, MSG); // set the dst and type of the frame
class warning_frame extends frame;
bit [2:0] warning_type;
function MSG_TYPE send_warning ();
return warning_type;
endfuction;
endclass
131](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-131-320.jpg)




![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Assertion
assert(value>=5)
else $warning(“Value above range”);
assert property (request && !ready)
assert property (@posedge clk) req |-> ##[2:5] grant);
136](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-136-320.jpg)
![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Package
package FSM_types
// global typedef
typedef enum FSM{INVALID, READ, DECODE, EXECUTE, WRITE} pipelines; bit idle; // global
variable initialize to 0
task invalid_cycle (input [2:0] curret_state) //global task
if (current_state == INVALID)
$display(“invalid state”);
$finish;
endtask: invalid_cycle
endpackage
SV has borrowed the concept of a package from VHDL.
Package is used to share user defined type definitions
across multiple modules, interfaces, other programs
and packages
137](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-137-320.jpg)
![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Randomization
bit [15:0] value1, value2;
bit valid;
initial
begin
for(i=0; i<1024; i++)
valid = randomize (value1, value2);
end
end
valid = randomize (value1, value2); with (value1>32; value1 < 1021);
SV supports unconstrained and constrained random
value generation
Very useful to generate random test vectors for stimulus
138](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-138-320.jpg)
![Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
Coverage
module stimulus;
logic [15:0] operand1, operand2;
.
.
covergroup cg_operands @ (posedge clk)
o1: coverpoint = operand1;
o2: coverpoint = operand2;
endgroup : cg_operands
.
.
cg_operands cover_ops = new( );
.
endmodule
covergroup cg_operands @ (posedge clk)
o1: coverpoint = operand1 {
bins low = {0,63};
bins med = {64,127};
bins high = {128,255};
}
o2: coverpoint = operand2 {
bins low = {0,63};
bins med = {64,127};
bins high = {128,255};
}
endgroup : cg_operands.
•Coverage quantitatively measure the extent
that the functioning of a DUT is
•Verified
•The statistics are gathered using coverage
groups
•The user lists variables as converpoints
139](https://image.slidesharecdn.com/veriloghdl-240527093750-b64fc4e2/85/Verilog_HDL-computer-architecture-and-organization-139-320.jpg)































Ad
More Related Content
Similar to Verilog_HDL computer architecture and organization (20)
Recently uploaded (20)


















Ad
Verilog_HDL computer architecture and organization
- 1. Using Hardware Description Language Verilog HDL & System Verilog Lecture 2 Dr. Shoab A. Khan 1
- 2. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Verilog HDL “Though Verilog is C like in syntax but has distinct character and interpretation. A programmer must set his perception right before coding in Verilog. He must visualize hardware in his mind while structuring Verilog modules consisting of procedural blocks and assignments.” 2
- 3. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan System level design components Floating Point Behavioral Description Design Specification Fixed Point Implementation S/W SW S/W - H/W Partition System Integration and testing Algorithm development Fixed Point Conversion HW Gate Level Net List Timing & Functional Verification Synthesis Functional Verification Layout Hardware development and testing Software development and testing System level design, verification and testing RTL Verilog Implementation S/W - H/W Co-verification 3
- 4. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Digital Design at Algorithmic Level Algorithms are developed using tools like Matlab The algorithmic implementation only checks the functionality of the design without any HW considerations At algorithmic level an application can also be coded in Verilog using high level language constructs SystemVerilog can also be used at algorithmic level for simulation and verification the design 4
- 5. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Digital Design at Transaction At TLM the inter component communication is implemented as transactions and RTL details are ignored Transactor C++ test vector generator Checker Transactor C++ Implementation Coverage TLM Transactor C++ test vector generator Checker Transactor C++ Implementation Coverage DUT Driver Monitor RTL TRANSLATOR TLM 5
- 6. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Digital Design at RTL 6
- 7. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan RTL Design and HDLs At RTL level the designer must know all the registers in the design The computations performed are modeled by a combinational cloud Gate level details are not important HDLs Verilog/VHDL are used to implement a design at RTL level Verilog resembles with C and is usually preferred in industry 7
- 8. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan RTL Design and HDLs 8
- 9. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Modeling, Simulation and Synthesis Verilog is used for modeling design at RTL and writing stimulus for testing and simulation on simulation tools like Modelsim® Simulation tools typically accept full set of Verilog language constructs The RTL design without stimulus is synthesized on target technologies Some language constructs and their use in a Verilog description make simulation efficient and they are ignored by synthesis tools Synthesis tools typically accept only a subset of the full Verilog language constructs These constructs are called RTL Verilog 9
- 10. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Verilog Standards - 1995: IEEE Standard 1364-1995 (Verilog 95) - 2002: IEEE Standard 1364-2001 (Verilog 2001) - 2003: IEEE Standard 1364-2001 revision C - 2005: IEEE Standard 1364-2005 (Verilog 2005) “1364-2005 IEEE Standard for Verilog Hardware Description Language” - 2005: IEEE Standard 1800-2005 (SystemVerilog) “1800-2005 IEEE Standard for System Verilog: Unified Hardware Design, Specification and Verification Language” 10
- 11. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan The Basic Building Block: Module The Module Concept The module is the basic building block in Verilog Modules are: • Declared • Instantiated Modules declarations cannot be nested 11
- 12. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Modeling Structure: Modules Modules can be interconnected to describe the structure of your digital system Modules start with keyword module and end with keyword endmodule Modules have ports for interconnection with other modules Two styles of module templates module FA <port declaration>; . . . endmodule module FA <portlist>; port delaration; . . endmodule Verilog-95 Verilog-2001 12
- 13. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Module Template and Module Definition module FA (<port declaration>); . . . . . . . . . . . . endmodule module FA( input a, input b, input c_in, output sum, output c_out); assign {c_out, sum} = a+b+c_in; endmodule (a) (b) 13
- 14. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Hierarchical Design Verilog code contains a top-level module and zero or more instantiated modules The top-level module is not instantiated anywhere Several copies of a lower-level module may exist Each copy stores its own values of regs/wires Ports are used for interconnections to instantiated modules Order of ports in module definition determine order for connections of instantiated module 14
- 15. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Verilog FA module with input and output ports module FA(a, b, c_in, sum, c_out); input a, b, c; ouput sum, c_out; assign {c_out, sum} = a+b+c_in; endmodule module FA( input a, b, c_in, output sum, c_out); assign {c_out, sum} = a+b+c_in; endmodule (a) (b) (a)Port declaration in module definition and port listing follows the definition 15 (b) Verilog-2001 support of ANSI style port listing in module definition
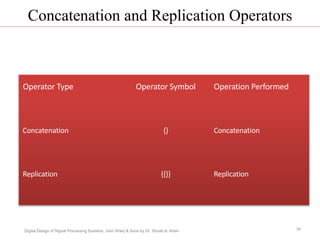
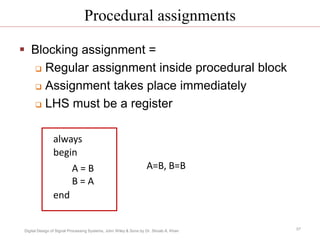
- 16. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan A design of 3-bit RCA using instantiation of three FAs a[0] 1 1 b[0] a[1] 1 1 b[1] a[2] 1 1 b[2] a b 3 1 carry[0] carry[1] sum[0] sum[1] sum[2] sum 3 cout 1 cin 3 fa0 FA fa1 FA fa2 FA 16
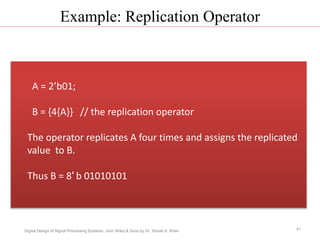
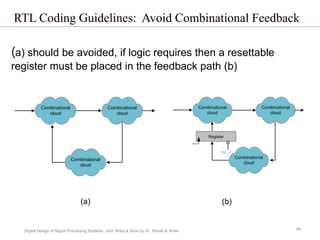
- 17. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Verilog module for a 3-bit RCA module RCA( input [2:0] a, b, input c_in, output [2:0] sum, output c_out); wire carry[1:0]; // module instantiation FA fa0(a[0], b[0], c_in, sum[0], carry[0]); FA fa1(a[1], b[1], carry[0], sum[1], carry[1]); FA fa2(a[2], b[2], carry[1], sum[2], c_out); endmodule module RCA( input [2:0] a, b, input c_in, output [2:0] sum, output c_out); wire carry[1:0]; // module instantiation FA fa0(.a(a[0]),.b( b[0]), .c_in(c_in), .sum(sum[0]),.c_out(carry[0])); FA fa1(.a(a[1]), .b(b[1]), .c_in(carry[0]), .sum(sum[1]), .c_out(carry[1])); FA fa2(.a(a[2]), .b(b[2]), .c_in(carry[1]), .sum(sum[2]), .c_out(c_out)); endmodule (a) (b) (a) Port connections following the order of ports definition in the FA module 17 (b) Port connections using names
- 18. Design Partitioning and Synthesis Guidelines 18
- 19. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Design Partitioning At system level a design should be broken into a number of modules A mix of top down and bottom up methodology is practiced Some lower level modules are hierarchically instantiated to make bigger modules Top level modules are broken into smaller lower level modules 19
- 20. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Design Partitioning Encryption & Round Key Local mem Port A/B 8 Write words to mem AES 1 Port A Port B FIFO AES 8 aes_done Port A Port B FEC Local mem 8 Port A Port B Framer FIFO 8 Write encoded data to memory Write mod_bit_stream Port B Port A FEC FIFO 8 Read frm_bit_stream frm_bit_valid Framer Framer IF Tx_out DAC_clk D/A Interface serial clk serial-data 12-bit data stream fec_done circuit clk FEC Encoding FEC-IF NRZ-IF ASP AES Mx output bit clock X GMSK Modulator Selection logic jωо n e Read 20
- 21. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Synthesis Guideline Module 1 Module 2 Module 3 Cloud 2 Cloud 3 Cloud 1 Design partitioning in number of modules with modules boundaries on register outputs 21
- 22. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Synthesis Guideline: Glue logic at top level should be avoided Module 1 Module 2 Top Level Module clk rst-n glue logic 22
- 23. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Synthesis guideline Timing Area Module 1 Critical Logic Non-Critical Logic A bad design where time critical and non critical logic are placed in the same module 23
- 24. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Synthesis guideline Timing Area Module 1 Module 2 Critical Logic Non-Critical Logic A good design places critical logic and non critical logic in separate modules 24
- 25. Digital Design of Signal Processing Systems, John Wiley & Sons by Shoab A. Khan Verilog syntax 25
- 26. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Possible values a bit may take in Verilog 0 zero, logic low, false, or ground 1 one, logic high, or power x unknown z high impedance, unconnected, or tri-state port A number in Verilog may contain all four possible values: Example: 20‟b 0011_1010_101x_x0z0_011z 26
- 27. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Data Types Nets Nets are physical connections between components Nets always show the logic value of the driving components Many types of nets, we use wire in RTL Registers Implicit storage – unless variable of this type is modified it retains previously assigned value Does not necessarily imply a hardware register Register type is denoted by reg 27
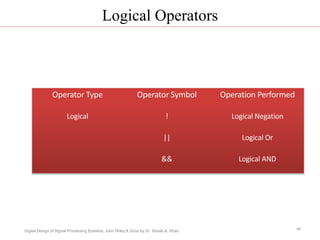
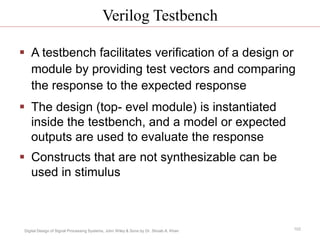
- 28. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Variable Declaration Declaring a net, signed or unsigned wire [<signed>] [<range>] <net_name> [<net_name>*]; Range is specified as [MSB:LSB]. Default is one bit wide Declaring a register reg [<signed>] [<range>] <reg_name> [<reg_name>*]; Declaring memory reg [<range>] <memory_name> [<start_addr> : <end_addr>]; Examples reg r; // 1-bit reg variable wire x1, x2; // 2 1-bit wire variable reg signed [7:0] y_reg; // 8-bit sign register reg [7:0] ram_mem [0:1023]; //a 1 KB memory 28
- 29. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Constants Constants can be written in decimal (default) • 13, „d13 binary • 4‟b1101 octal • 4‟o15 hexadecimal • 4‟hd 29
- 30. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Four Levels of Abstraction The HW can be described at several levels of details To capture these details Verilog provides four levels of abstraction 1. Switch level 2. Gate level 3. Dataflow level 4. Behavioral or algorithmic level 30
- 31. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Levels of Abstractions Switch Level: The lowest level of abstraction is the switch or transistor Level Modeling Gate Level: Synthesis tools compile high level code and generate code at gate level Dataflow Level: The level of abstraction higher than the gate level Behavioral Level: In more complex digital designs, priority is given to the performance and behavior at algorithmic level 31
- 32. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Gate level or structural modeling Are build from gate primitives Verilog has built-in gate-level primitives NAND, NOR, AND, OR, XOR, BUF, NOT, and some others Describe the circuit using logic gates-much as you have see in an implementation of a circuit in basic logic design course The delay can also be modeled Typical gate instantiation is and #delay instance-name (out, in1, in2, in3, …) 32
- 33. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Example: Gate-level implementation of 2:1 MUX using Verilog Primitives module mux (out, in1, in2, sel); output out; input in1, in2, sel; wire out1, out2, sel_n; and #5 a1(out1, in1, sel_n); and #5 a2(out2, in2, sel); or #5 o1(out, out1, out2); not n1(sel_n, sel); endmodule (a) (b) out sel in1 in2 out1 out2 33
- 34. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Dataflow Modeling Expressions, operands and operators form the basis of dataflow modeling. 34
- 35. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan A list of operators for dataflow modeling 35
- 36. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Arithmetic Operators Operator Type Operator Symbol Operation Performed Arithmetic * Multiply / Divide + Add - Subtract % Modulus ** Power 36
- 37. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Conditional Operator Operator Type Operator Symbol Operation Performed Conditional ?: Conditional 37
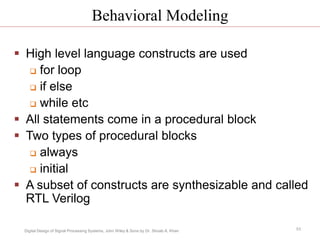
- 38. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Conditional Operator out = sel ? a : b; if(sel) out = a; else out = b; This statement is equivalent to following decision logic. Conditional operator can also be used to infer higher order multiplexers. The code here infers 4:1 multiplexer. out = sel[1] ? ( sel[0] ? in3 : in2 ) : ( sel[0] ? in1 : in0 ); 38
- 39. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Concatenation and Replication Operators Operator Type Operator Symbol Operation Performed Concatenation {} Concatenation Replication {{}} Replication 39
- 40. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan MSB LSB p 13 bits p={a[3:0], b[2:0], 3'b111, c[2:0]}; Example of Concatenation Operator 40
- 41. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Example: Replication Operator A = 2’b01; B = {4{A}} // the replication operator The operator replicates A four times and assigns the replicated value to B. Thus B = 8′ b 01010101 41
- 42. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Relational Operator > Greater than < Less than >= Greater than or equal <= Less than or equal 42 Relational Operator Operator Symbol Operation performed
- 43. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Reduction Operators Operator Type Operator Symbol Operation performed Reduction & ~& | ~| ^ ^~ or ~^ Reduction and Reduction nand Reduction or Reduction nor Reduction xor Reduction xnor 43
- 44. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Bitwise Arithmetic Operators Bitwise ~ Bitwise negation & Bitwise AND ~& Bitwise NAND | Bitwise OR ~| Bitwise NOR ^ Bitwise XOR ^~ or ~^ Bitwise XNOR 44 Operator Type Operator Symbol Operation performed
- 45. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Equality Operators Operator Type Operator Symbol Operation performed Equality == != === !== Equality Inequality Case Equality Case Inequality 45
- 46. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Logical Operators Operator Type Operator Symbol Operation Performed Logical ! Logical Negation || Logical Or && Logical AND 46
- 47. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Shift Operators Operator Type Operator Symbol Operation Performed Logic Shift >> Unsigned Right Shift << Unsigned Left Shift Arithmetic Shift >>> Signed Right Shift <<< Signed Left Shift 47
- 48. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Example: Shift Operator Shift an unsigned reg A = 6′b101111 by 2 B = A >> 2; drops 2 LSBs and appends two zeros at MSBs position, thus B = 6′b001011 48
- 49. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Example: Arithmetic Shift Arithmetic shift right a wire A= 6′b101111 by 2 B = A >>> 2; This operation will drop 2 LSBs and appends the sign bit to 2 MSBs locations. Thus B is 6΄b111011. 49
- 50. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Example: Reduction Operator Apply & reduction operator on a 4-bit number A=4′b1011 assign out = &A; This operation is equivalent to performing a bit- wise & operation on all the bits of A i.e. out = A[0] & A[1] & A[2] & A[3]; 50
- 51. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Data Flow Modeling: Continuous Assignment Continually drive wire variables Model combinational logic module adder_4 (a, b, ci, s, co); input [3:0] a, b; input ci; output [3:0] s; output co; assign {co, s} = a + b + ci; endmodule 51
- 52. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan module mux2_1(in1, in2, sel, out); input in1, in2, sel; output out; assign out = sel ? in2: in1; endmodule module stimulus; reg IN1, IN2, SEL; wire OUT; mux2_1 MUX(IN1, IN2, SEL, OUT); initial begin IN1 = 1; IN2 = 0; SEL = 0; #5 SEL = 1; #5 IN1 = 0; end initial $monitor($time, ": IN1=%b, IN2=%b, SEL=%b, OUT=%bn", IN1, IN2, SEL, OUT); endmodule Complete Example: 2:1 Mux The module with continuous assignment Stimulus to test the design 52
- 53. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Behavioral Modeling High level language constructs are used for loop if else while etc All statements come in a procedural block Two types of procedural blocks always initial A subset of constructs are synthesizable and called RTL Verilog 53
- 54. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Initial and always blocks Multiple statements per block Procedural assignments Timing control control Initial blocks execute once at t = 0 Always blocks execute continuously at t = 0 and repeatedly thereafter 54
- 55. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Initial and always blocks initial begin end procedural assignment 1 procedural assignment 2 procedural assignment 3 always begin end procedural assignment 1 procedural assignment 2 procedural assignment 3 55
- 56. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Initial Block This block starts with initial keyword This is non synthesizable Non RTL This block is used only in stimulus All initial blocks execute concurrently in arbitrary order They execute until they come to a #delay operator Then they suspend, putting themselves in the event list delay time units in the future At delay units, they resume executing where they left off 56
- 57. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Procedural assignments Blocking assignment = Regular assignment inside procedural block Assignment takes place immediately LHS must be a register always begin A = B B = A end A=B, B=B 57
- 58. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Procedural assignments Nonblocking assignment <= Compute RHS Assignment takes place at end of block LHS must be a register always begin A <= B B <= A end Swap A and B 58
- 59. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Blocking Procedural Assignment with three methods of writing sensitivity list reg sum, carry; always @ (x or y) begin sum = x^y; carry = x&y; end reg sum, carry; always @ (x, y) begin sum = x^y; carry = x&y; End reg sum, carry; always @ (*) begin sum = x^y; carry = x&y; end (a) (b) (c) (a) Verilog-95 style (b) Verilog-2001 support of comma separated sensitivity list (c) Verilog-2001 style that only writes * in the list 59
- 60. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan # Time Control $time A built-in variable that represents simulated time a unitless integer $display($time, “a=%d”, a); # Time Control #<number> statement statement is not executed until <number> time units have passed control is released so that other processes can execute used in test code used to model propagation delay in combinational logic 60
- 61. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan # Time Control Delay parameter for a built-in logic gate wire c; xor #2 x2(c, a, b); 61
- 62. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan @ Time Control @(*) @(expression) @(expression or expression or …) @(posedge onebit) @(negedge onebit) do not execute statement until event occurs @(clk) is same as @(posedge clk or negedge clk) 62
- 63. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Code with non blocking procedural assignment reg sum_reg, carry_reg; always @ (posedge clk) begin sum_reg <= x^y; carry_reg <= x&y; end 63
- 64. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Time Control # and @ $display ($time, “a=%d”, a); always @ (a or b) c = a^b; // combinational logic always @(posedge clk) c_reg <= c; // sequential register 64
- 65. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Sensitivity list @ to model combinational logic behaviorally Either all inputs in the block must be included in the sensitivity list always @ (a, b) // equivalent is (a or b) c = a^b; Or use always @ (*) // Verilog-2001 c = a^b; 65
- 66. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan RTL Coding Guidelines: Avoid Combinational Feedback Combinational cloud Combinational cloud Combinational cloud (a) (b) Combinational cloud Combinational cloud Register rst_n Combinational cloud (a) should be avoided, if logic requires then a resettable register must be placed in the feedback path (b) 66
- 67. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Inferring Resettable Register (a) Verilog code to infer a register with asynchronous active low reset (b) Verilog code to infer a register with asynchronous active high reset (a) (b) // register with asynchronous active low reset always @ (posedge clk or negedge rst_n) begin If (! rst_n) r_reg <= 4’b0; else r_reg <= data; end endmodule // register with asynchronous active high reset always @ (posedge clk or posedge rst) begin If (rst) r_reg <= 4’b0; else r_reg <= data; end endmodule 67
- 68. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Inferring Resettable Register (a) Verilog code to infer a register with synchronous active low reset (b) Verilog code to infer a register with synchronous active high reset // register with synchronous active low reset always @ (posedge clk) begin If (! rst_n) r_reg <= 4’b0; else r_reg <= data; end endmodule // register with synchronous active high reset always @ (posedge clk) begin If (rst) r_reg <= 4’b0; else r_reg <= data; end endmodule (a) (b) 68
- 69. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Using asynchronous reset in implementing an accumulator // Register with asynchronous active-low reset always @ (posedge clk or negedge rst_n) begin if(!rst_n) acc_reg <= 16’b0; else acc_reg <= data+acc_reg; end // Register with asynchronous active-high reset always @ (posedge clk or posedge rst) begin if(rst) acc_reg <= 16’b0; else acc_reg <= data+acc_reg; end + 16 clk acc_reg rst_n 4 data Example: An Accumulator 69
- 70. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Generating Clock in Stimulus initial // All the initializations should be in the initial block begin clk = 0; // clock signal must be initialized to 0 # 5 rst_n = 0; // pull active low reset signal to low # 2 rst_n=1; // pull the signal back to high end always // generate clock in an always block #10 clk=(~clk); 70
- 71. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Conditional Execution: case statement module mux4_1(in1, in2, in3, in4, sel, out); input [1:0] sel; input [15:0] in1, in2, in3, in3; output [15:0] out; reg [15:0] out; always @(*) case (sel) 2'b00: out = in1; 2'b01: out = in2; 2'b10: out = in3; 2'b11: out = in4; default: out = 16'bx; endcase endmodule Like C and other high-level programming languages, Verilog supports switch and case statements for multi-way decision support. 71
- 72. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan casex and casez statements To make comparison with the „don‟t care‟ casez takes z as don‟t care casex takes z and x as don‟t care always @(op_code) begin casez (op_code) 4’b1???: alu_inst(op_code); 4’b01??: mem_rd(op_code); 4’b001?: mem_wr(op_code); endcase end 72
- 73. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Conditional Statements: if-else Verilog supports conditional statements if-else if-(else if)-else if (brach_flag) PC = brach_addr else PC = next_addr; always @(op_code) begin if (op_code == 2’b00) cntr_sgn = 4’b1011; else if (op_code == 2’b01) cntr_sgn = 4’b1110; else cntr_sgn = 4’b0000; end 73
- 74. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan RTL Coding Guideline: Avoid Latches in the Design A latch is a storage device that stores a value without the use of a clock. Latches are technology-specific and must be avoided in synchronous designs To avoid latches adhere to coding guidelines fully specify assignments or use a default assignment out_b is not assigned any value under else, the synthesis tool will infer a latch input [1:0] sel; reg [1:0] out_a, out_b; always @ (*) begin if (sel == 2’b00) begin out_a = 2’b01; out_b = 2’b10; end else out_a = 2’b01; end 74
- 75. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Avoiding Latches Use default assignments input [1:0] sel; reg [1:0] out_a, out_b; always @ (*) begin out_a = 2’b00; out_b = 2’b00; if (sel=2’b00) begin out_a = 2’b01; out_b = 2’b10; end else out_a = 2’b01; end 75
- 76. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Avoid Latches input [1:0] sel; reg [1:0] out_a, out_b; always @* begin out_a = 2’b00; out_b = 2’b00; if (sel==2’b00) begin out_a = 2’b01; out_b = 2’b10; end else if (sel == 2’b01) out_a = 2’b01; end All conditions to be checked For if block there must be an else For case, either check all conditions or use a default always @* begin out_a = 2’b00; out_b = 2’b00; if (sel==2’b00) begin out_a = 2’b01; out_b = 2’b10; end else if (sel == 2’b01) out_a = 2’b01; else out_a = 2’b00; end 76
- 77. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Avoid Latches Correct use of case statements and default assignments always @* begin out_a = 2’b00; out_b = 2’b00; case (sel) 2’b00: begin out_a = 2’b01; out_b = 2’b10; end 2’b01: out_a = 2’b01; default: out_a = 2’b00; endcase end 77
- 78. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Loop Statements Loop statements are used to execute a block of statements multiple times repeat, while, for, forever In RTL a loop infers multiple instances of the logic in loop body i=0; while (i<5) begin $display("i=%dn", i); i=i+1; end i=0; repeat (5) begin $display("i=%dn", i); i=i+1; end for (i=0; i<5; i=i+1) begin $display("i=%dn", i); end 78
- 79. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Port Definitions Input Ports Always wire Output Ports wire if dataflow modeling constructs are used reg if behavioral modeling I.e. assignment is made in a procedural block Inout Ports always wire 79
- 80. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Ports and Data Types Arrow analogy Head is always wire Tail wire or reg • wire if continuous assignment • reg is procedural assignment register/wire wire wire wire register/wire wire input output inout module0 module1 module2 80
- 81. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Simulation Control $finish Specifies when simulation ends $stop Suspends the simulation and enters interactive mode $display Prints output using format similar to C and creates a new line $monitor Similar to $display but active all the time 81
- 82. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan $monitor Prints its string when one of the listed values changes Only one monitor can be active at any time Prints at the end of current simulation time Display is like printf( ) $monitor ( $time, “A=%d, B=%d, CIN=%b, SUM=%d, COUT=%d”, A, B, CIN, COUT ); $display ( $time, “A=%d, B=%d, CIN=%b, SUM=%d, COUT=%d”, A, B, CIN, COUT ); 82
- 83. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan module irr( input signed [15:0] x, input clk, rst_n, output reg signed [31:0] y); reg signed [31:0] y_reg; always @(*) y =(y_reg>>>1) + x; // combinational logic always @(posedge clk or negedge rst_n) // sequential logic begin if (!rst_n) y_reg <= 0; else y_reg <= y; end endmodule The RTL Verilog code implementing a single tap IIR filter y[n]=0.5y[n-1]+x[n] Example 83
- 84. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Stimulus for the IIR filter design module module stimulus_irr; reg [15:0] X; reg CLK, RST_N; wire [31:0] Y; integer i; irr IRR0(X, CLK, RST_N, Y); initial begin CLK = 0; #5 RST_N = 0; #2 RST_N = 1; end initial begin X = 0; for(i=0; i<10; i=i+1) #20 X = X + 1; $finish; end always #10 CLK = ~CLK; initial $monitor($time, " X=%d, sum=%d, Y=%d", X, IRR0.y, Y); initial begin #60 $stop; end endmodule 84
- 85. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Timing diagram for the IIR filter design Value 0 Value 1 Value 2 Value 1 Value 2 x Value 0 x x y_reg 10 time units 10 time units 10 time units 10 time units clk rst_n y 10 time units 0 10 time units 10 time units 10 time units 85
- 86. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan A dump of timing diagram from ModelSim simulator 86
- 87. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Usefulness of parameterized model module adder (a, b, c_in, sum, c_out); parameter SIZE = 4; input [SIZE-1: 0] a, b; output [SIZE-1: 0] sum; input c_in; output c_out; assign {c_out, sum} = a + b + c_in; endmodule Parameters are constants A parameter is assigned a default value in the module For every instance of this module it can be assigned a different value 87
- 88. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Same module declaration using ANSI style port listing module adder #(parameter SIZE = 4) (input [SIZE-1: 0] a, b, output [SIZE-1: 0] sum, input c_in, output c_out); 88
- 89. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Instantiation of the module for adding 8-bit inputs in1 and in2 module stimulus; reg [7:0] in1, in2; wire [7:0] sum_byte; reg c_in; wire c_out; adder #8 add_byte (in1, in2, c_in, sum_byte, c_out); . . endmodule 89
- 90. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan In Verilog the parameter value can also be specified by name adder #(.SIZE(8)) add_byte (in1, in2, c_in, sum_byte, c_out); 90
- 91. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Parameterized code module adder #(parameter SIZE1 = 4, SIZE2=6) (input [SIZE1-1: 0] a, Input [SIZE2-1: 0] b, output [SIZE2-1: 0] sum, input c_in, output c_out); 91
- 92. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Loading memory data from a file $readmemb (“memory.dat”, mem); The statement loads data in memory.dat file into mem. 92
- 93. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Macros `define DIFFERENCE 6‟b011001 The use of the define tag is shown here. if (ctrl == `DIFFERENCE) 93
- 94. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Preprocessing commands `ifdef G723 $display (“G723 execution”); `else $display (“other codec execution”); `endif 94
- 95. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Instead of making multiple copy of common code, it can be written as a task and called multiple times Task definition occurs inside a module Task is called only from initial and always blocks and other tasks in that module Task contains any behavioral statements, including time control Order of input, output, and inout definitions determines binding of arguments input argument may not be reg output arguments must be reg Task 95
- 96. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan task name; input arguments; output arguments; inout arguments; … declarations; begin statement; … end endtask Task template 96
- 97. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Example: Task module RCA( input [3:0] a, b, input c_in, output reg c_out, output reg [3:0] sum ); reg carry[4:0]; integer i; task FA( input in1, in2, carry_in, output reg out, carry_out); {carry_out, out} = in1 + in2 + carry_in; endtask always@* begin carry[0]=c_in; for(i=0; i<4; i=i+1) begin FA(a[i], b[i], carry[i], sum[i], carry[i+1]); end c_out = carry[4]; end endmodule 97
- 98. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Functions The common code can also be written as function Function implements combinational behavior No timing controls or tasks May call other functions with no recursion No output or inout allowed Output is an implicit register having name and range of function 98
- 99. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Functions template Syntax: function_declaration function [range or type] function_identifier; function_call function_identifier (expression {, expression}) 99
- 100. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Example: Function module MUX4to1( input [3:0] in, input [1:0] sel, output out); wire out1, out2; function MUX2to1; input in1, in2; input select; assign MUX2to1 = select ? in2:in1; endfunction assign out1 = MUX2to1(in[0], in[1], sel[0]); assign out2 = MUX2to1(in[2], in[3], sel[0]); assign out = MUX2to1(out1, out2, sel[1]); endmodule module testFunction; reg [3:0] IN; reg [1:0] SEL; wire OUT; MUX4to1 mux(IN, SEL, OUT); initial begin IN = 1; SEL = 0; #5 IN = 7; SEL = 0; #5 IN = 2; SEL=1; #5 IN = 4; SEL = 2; #5 IN = 8; SEL = 3; end initial $monitor($time, " %b %b %bn", IN, SEL, OUT); endmodule 100
- 101. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan CASE STUDY of design of a communication receiver is covered in the book 101
- 102. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Verilog Testbench A testbench facilitates verification of a design or module by providing test vectors and comparing the response to the expected response The design (top- evel module) is instantiated inside the testbench, and a model or expected outputs are used to evaluate the response Constructs that are not synthesizable can be used in stimulus 102
- 103. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan RTL COMPARISON simulator Test Vectors TRUE FALSE log ERROR Testing RTL Design Make a simulation model Generate and give test vectors to both Test against the model 103
- 104. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Behavioral Modeling A set of inputs is applied and the outputs are checked against the specification or expected output No consideration to the inner details of the system Testing against specifications while making use of the known internal structure of the system. Enables easy location of bug for quick fixing Performed by the developer Test Cases generation DUT Comparisons Log the values in case of mismatch stimulus actual Output expected Output diff Test Cases generation Log the values in case of mismatch stimulus actual Output expected Output diff Comparisons Expected interval state Actual interval state (a) Black-box testing (b) While-box level testing 104
- 105. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan An Example Verification Setup Transactor C++ test vector generator Checker Transactor C++ Implementation Coverage TLM Transactor C++ test vector generator Checker Transactor C++ Implementation Coverage DUT Driver Monitor RTL TRANSLATOR TLM 105
- 106. Digital Design of Signal Processing Systems, John Wiley & Sons by Shoab A. Khan Adv Digital Design Contents System Verilog 106
- 107. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan SystemVerilog SystemVerilog (SV) offers a unified language that is very powerful to model complex systems SV advanced constructs facilitate concise writing of test benches and analyzing the coverage. Most of the EDA tool vendors are continuously adding support of SV 107
- 108. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Additional data types in SystemVerilog Data Type Description States Example logic User defined 4 states 0,1, x ,z logic [15:0] a,b; int 32 bit signed 2 states 0,1 int num; bit User defined 2 states 0,1 bit [5:0] in; byte 8 bit signed 2 states 0,1 byte t; longint 64 bit signed 2 states 0,1 longint p; shortint 16 bit signed 2 states 0,1 shortint q; 108
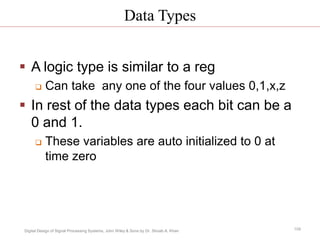
- 109. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Data Types A logic type is similar to a reg Can take any one of the four values 0,1,x,z In rest of the data types each bit can be a 0 and 1. These variables are auto initialized to 0 at time zero 109
- 110. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Packed & unpacked 1-D and 2-D arrays bit up_data [15:0]; bit [31:0] up_mem [0:511]; bit [15:0] p_data; bit [31:0][0:511] p_mem1, p_mem2; slice_data = up_mem [2][31:15]; // most significant byte at mem location 2 add_mem = p_mem1 + p_mem2; bit [15:0] array[]; array = new[1023]; SV can operate on an entire two-dimensional (2-D) array of packed data Unpacked arrays can be operated only on an indexed value Dynamic arrays can also be declared as 110
- 111. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Module Instantiation and Port Listing module FA(in1, in2, sum, clk, rest_n); Assuming the instance has first three ports with the same name, the instance can be written as FA ff (.in1, .sum, .in2, .clk(clk_global), .rest_n (rst_n)); Or more concisely as FA ff (.*, .clk(clk_global), .rest_n (rst_n)); 111
- 112. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan C/C++ like Constructs • typedef, struct and enum typedef bit [15:0] addr; typedef struct { addr src; addr dst; bit [31:0] data; } packet_tcp; module packet ( input packet_tcp packet_in, input clk, output packet_tcp packet_out); always_ff @(posedge clk) begin packet_out.dst <= packet_in.src; packet_out.src <= packet_in.dst; packet_out.data <= ~packet_in.data; end endmodule 112
- 113. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Enum typedef enum logic [2:0] { idle = 0, read = 3, dec, // = 4 exe } states; states pipes; The enum can also be directly defined as enum {idle, read=3, dec, exe} pipes; case (pipes) idle: pc = pc; read: pc = pc+1; . . endcase 113
- 114. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Operators Operand1 Op = Operand2 X += 2; Increment/decrement Op ++, Op--, ++Op, --Op i++ 114
- 115. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan for and do-while Loops do begin if (sel_1 == 0) continue; if (sel_2 == 3) break; end while (sel_2==0); for( integer i=0, j=0, k=0; i+j+k < 20; i++, j++, k++) 115
- 116. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Procedural Block: always module adder(input signed [3:0] in1, in2, input clk, rst_n, output logic signed [15:0] acc); logic signed [15:0] sum; // combinational block always_comb begin: adder sum = in1 + in2 + acc; end: adder // sequential block always_ff @(posedge clk or negedge rst_n) if (!rst_n) acc <= 0; else acc <= sum; endmodule always_comb , always_latch and always_ff SV solves the issue of sensitivity list 116
- 117. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Procedural Block: final final begin $display($time, “ simulation time, the simulation endsn”); end 117
- 118. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Unique and Priority case statements User guarantees that all cases are handled in the coding and each case will only uniquely match with one of the selection always @* unique case (sel) //equivalent to full-case parallel-case 2’b00: out = in0; 2’b01: out = in1; 2’b10: out = in2; 2’b11: out = in3; default: out = ‘x; endcase 118
- 119. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Priority case The priority case is used in instances where the programmer intends to prioritize the selection and more than one possible match is possible always @* priority case (1’b1) //equivalent to full-case synthesis directive irq1: out = in0; irq3: out = in1; irq2: out = in2; ir: out = in3; default: out = ‘x; endcase 119
- 120. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Priority case always @* unique case (sel) //equivalent to full-case parallel- case synthesis directive 2’b00: out = in0; 2’b01: out = in1; 2’b10: out = in2; 2’b11: out = in3; default: out = ‘x; endcase User guarantees that all cases are handled in the coding and each case will only uniquely match with one of the selections 120
- 121. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Nested Modules module accumulator(input clk, rst_n, input [7:0] data, output bit [15:0] acc); always_ff @ (posedge clk) begin if (!rst_n) acc <= 0; else acc <= acc + data; end endmodule logic clk=0; always #1 clk = ~clk; logic rst_n; logic [7:0] data; logic [15:0] acc_reg; accumulator acc_inst(clk, rst_n, data, acc_reg); initial begin rst_n = 0; #10 rst_n = 1; data = 2; #200 $finish; end initial $monitor($time, "%d, %dn", data, acc_reg); endmodule 121
- 122. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan SV Function No begin and end to place multiple statements SV functions can return a void. Addition of the return statement is also added The input and output can also be passed by name 122
- 123. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Functions and Tasks function void expression (input integer a, b, c, output integer d); d = a+b-c; endfunction: expression function integer divide (input integer a, b); if (b) divide = a/b; else begin $display(“divide by 0n”); return (‘hx); end // rest of the function . . endfunction: divide 123
- 124. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Interface A major addition It encapsulates connectivity and replaces a group of ports and their interworking with a single identity The interface can contain Parameters Constants Variables functions and tasks. 124
- 125. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan A Local Bus interface between two modules 32 8 addr 1 rqst 1 grant 1 done data Local Bus 125
- 126. interface local_bus(input logic clk); bit rqst; bit grant; bit rw; bit [4:0] addr; wire [7:0] data; modport tx (input grant, output rqst, addr,rw, inout data, input clk); modport rx (output grant, input rqst, addr, rw, inout data, input clk); endinterface module src (input bit , clk, local_bus.tx busTx); integer i; logic [7:0] value = 0; assign busTx.data = value; initial begin busTx.rw = 1; for (i=0; i<32; i++) begin 126
- 127. #2 busTx.addr = i; value += 1; end busTx.rw = 0; end // rest of the modules detail here endmodule module dst ( input bit clk, local_bus.rx busRx); logic [7:0] local_mem [0:31]; always @(posedge clk) if (busRx.rw) local_mem[busRx.addr] = busRx.data; endmodule // In the top-level module these modules are instantiated with interface declaration. module local_bus_top; logic clk = 0; local_bus bus(clk); // the interface declaration always #1 clk = ~clk; src SRC (clk, bus.tx); dst DST (clk, bus.rx); initial $monitor ($time, "t%d %d %d %dn", bus.rx.rw, bus.rx.addr, bus.rx.data, DST.local_mem[bus.rx.addr]); endmodule 127
- 128. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Class A class consists of data and methods. The methods are functions and tasks that operate on the data in the class. SV supports key aspects of OOP Inheritance encapsulation polymorphism 128
- 129. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Classes class frame{ byte dst_addr; bit [3:0] set_frame_type; data_struct payload; function byte get_src_addr () return src_addr; endfunction extern task assign_dst_addr_type (input byte addr, input bit[3:0] type); endclass task frame::assign_dst_addr(input byte addr, input bit [3:0] type); dst_addr = addr; frame_type = type; endtask 129
- 130. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan frame first_frame = new; A class constructor can also be used to initialize data as class frame{ . . function new (input byte addr, input [3:0] type) dst_addr = addr; frame_type = type; endfunction . . endclass 130
- 131. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan frame msg_frame = new(8’h00, MSG); // set the dst and type of the frame class warning_frame extends frame; bit [2:0] warning_type; function MSG_TYPE send_warning (); return warning_type; endfuction; endclass 131
- 132. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Direct Programming Interface SV can directly access a function written in C using a DPI A function or task written in SV can be exported to a C program. Interworking of C and SV code very trivial The C functions in SV are called using import directive, While functions and tasks of SV in a C function are accessible by using export DPI declaration 132
- 133. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Direct Programming Interface (DPI) // top level module that instantiates a module that Calls a C function module top_level(); moduleCall_C Call_C (rst, clk, in1, in2, out1, …); . . . endmodule The instantiated module Call_C of type moduleCall_C uses import directive for interfacing with C program. module moduleCall_C(rst, clk, in1, in2, out1,...); . . import "DPI-C" context task fuctionC (....); always@(posedge clk) functionC (rst,in1, in2, out1,....); export "DPI-C" task CallVeri1; export "DPI-C" task CallVeri2; task CallVeri1 (input int addr1, output int data1); . . endtask task CallVeri2 (input int addr2, output int data2); . . endtask . . endmodule 133
- 134. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan // required header files void fuctionC (int rst, ....) { . . rest = rst; . funct1(...); funct2(...); . . } void funct1 (void) { . . CallVeri1(....); . } void funct2 (void) { . . CallVeri2(....); . } 134
- 135. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Assertion SV supports two types of assertions immediate concurrent The immediate assertion is like an if-else statemen The expression in assert is checked for the desired behavior If this expression fails SV provides one of the three severity system tasks • $warning, $error and $fatal. Concurrent assertion checks the validity of a property 135
- 136. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Assertion assert(value>=5) else $warning(“Value above range”); assert property (request && !ready) assert property (@posedge clk) req |-> ##[2:5] grant); 136
- 137. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Package package FSM_types // global typedef typedef enum FSM{INVALID, READ, DECODE, EXECUTE, WRITE} pipelines; bit idle; // global variable initialize to 0 task invalid_cycle (input [2:0] curret_state) //global task if (current_state == INVALID) $display(“invalid state”); $finish; endtask: invalid_cycle endpackage SV has borrowed the concept of a package from VHDL. Package is used to share user defined type definitions across multiple modules, interfaces, other programs and packages 137
- 138. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Randomization bit [15:0] value1, value2; bit valid; initial begin for(i=0; i<1024; i++) valid = randomize (value1, value2); end end valid = randomize (value1, value2); with (value1>32; value1 < 1021); SV supports unconstrained and constrained random value generation Very useful to generate random test vectors for stimulus 138
- 139. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Coverage module stimulus; logic [15:0] operand1, operand2; . . covergroup cg_operands @ (posedge clk) o1: coverpoint = operand1; o2: coverpoint = operand2; endgroup : cg_operands . . cg_operands cover_ops = new( ); . endmodule covergroup cg_operands @ (posedge clk) o1: coverpoint = operand1 { bins low = {0,63}; bins med = {64,127}; bins high = {128,255}; } o2: coverpoint = operand2 { bins low = {0,63}; bins med = {64,127}; bins high = {128,255}; } endgroup : cg_operands. •Coverage quantitatively measure the extent that the functioning of a DUT is •Verified •The statistics are gathered using coverage groups •The user lists variables as converpoints 139
- 140. Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan Summary Signal processing applications are first algorithmically implemented using tools like Matlab The algorithmic description is then partitioned into HW and SW parts HW is designed at RTL and implemented in HDL Verilog is an HDL The designer must adhere to coding guide lines for effective synthesis of the design Verification of the RTL design is very critical and must be carefully crafted System Verilog adds more features for design and verification of digital designs 140