عرض وحدة تقنيات التحكم الرقمي والروبوت
Download as PPTX, PDF9 likes9,582 views

البرنامج التدريبي الجديد يركز على مفهوم الروبوتات وتطبيقاتها، حيث يتضمن دراسة التعريفات والتصنيفات ونظم التحكم. يتناول الجانب العملي كيفية برمجة الروبوتات باستخدام لغة بايثون مع تقديم أمثلة حقيقية للتطبيقات في مجالات متعددة. يهدف البرنامج إلى تطوير مهارات الطلاب في فهم التعامل مع الروبوتات وإيجابيات وسلبيات استخدامها.



























عرض وحدة تقنيات التحكم الرقمي والروبوت
- 2. الحاسبمقررات على التدريب برنامجالجديدة-وحدةوالربوت الرقمي التحكم تقنيات •يركزالجانبيالنظرعلىموضوعبوتوالرمنحيثتعريفهيخروتانشأتهوتطبيقاتبوتوالر املجاالتاملختلفةوتصنيفاتبوتوالرونظامالتحكمفيبوتوالرومكوناته •وحاسبيثانو لاألو الصف فيوالربوتالرقمي التحكمتقنيات وحدة سرتد1بواقع(6) كالتاليمقسمة اسيةردحصص: يالنظر الجزءالعملي الجزء (2)اسيةردحصة(4)اسيةردحصة •أماالجانبالعمليةرفهوعباعنيباترتدعمليةملحاكاةعملبوتوالرباستخداملغةنبايثو- السلحفاة.
- 3. فيأن يتوقع الجلسة نهايةنيكوأن على قادر كراملشا: •يتعرفنشأته يخروتا بوتوالرعلى. •يعدداملجاالت مختلف في بوتوالر تطبيقات ويصنف. •يتعرفبوتوالر وسلبيات إيجابياتعلى. •يتعرفبوتوالرتصنيفاتعلى. •يتعرفالتحكم لنظماألساسية املفاهيم على. •يعرفالدائرة ذي التحكم ونظام املفتوحةالدائرة ذي التحكم نظامبين قالفر،املغلقة فئة كل من ونماذج أمثلة ويذكر. •يتعرفبوتوالر مكونات على. •ينصباألساسية ومكوناته واجهتهعلى ويتعرف نالبايثوبرنامج. •يستخدمالبرنامج أوامر بعض. الجلسة أهداف الحاسبمقررات على التدريب برنامجالجديدة-وحدةوالربوت الرقمي التحكم تقنيات
- 4. البدء قبل الحاسبمقررات على التدريب برنامجالجديدة-وحدةوالربوت الرقمي التحكم تقنيات بوتوالرمع أوباماالرئيس
- 5. البدء قبل الحاسبمقررات على التدريب برنامجالجديدة-وحدةوالربوت الرقمي التحكم تقنيات بوتوالر لتقنيةاألطفال لتعليمبرنامج
- 6. البدء قبل الحاسبمقررات على التدريب برنامجالجديدة-وحدةوالربوت الرقمي التحكم تقنيات التعليمي بوتوالر نادي
- 7. اململك في بوتوالر مسابقاتة 1-مسابقةVEXلبرمجةوتصميمبوتوالر. 1-مسابقةBioloid. 3-مسابقةFIRST LEGO. الحاسبمقررات على التدريب برنامجالجديدة-وحدةوالربوت الرقمي التحكم تقنيات
- 8. الحاسبمقررات على التدريب برنامجالجديدة-وحدةوالربوت الرقمي التحكم تقنيات بوتوالر عن الخاطئة املفاهيم •أواآلليالرجل هوبوتوالر أن اآللي اإلنسان. •تص العلمي الخيال أفالم بعضرو وتكسبه ،آلهة كأنها بوتاتوالرا ذات أنهاأو،قةرخا اترقد ذكاءمن أعلى ذكاء مستويات املشاعر تمتلك أنها أو ،البشر واألحاسيس.
- 9. بوتوالر تعريف ماهوإذا الحاسبمقررات على التدريب برنامجالجديدة-وحدةوالربوت الرقمي التحكم تقنيات هوبوتوالر أن أنسبهالعل ،تعريفات عدة توجد: يمكمعينبعمل يقوم ، ً إلكترونيا به متحكمميكانيكي جهازيعمله أن ن اإلنسان، ت التي أو،الخطرة األعمال تنفيذ في اإلنسان عنبوتوالر ينوبفي نكو ال مع اررالتك تتطلبالتي أو ،اإلنسان يتحملها ال قاسية بيئةدقة.
- 10. 8دقائق جماعي نشاط(1/2/6) العلميةاملادةبالنشاط املرتبطة مالكتابالصفحات 1يثانو لاألو-الثالثة الوحدة128-133 تمرين يعزيزكراملشا: كر ُ ذفيالكتابأمثلةلتطبيقاتبوتوالرفيمجاالتمتعددةفيالعالمالحقيقي.بنالتعاومع أفرادمجموعتكأذكرمثالأضافيلكلتطبيقمنالتطبيقاتدةرالوا. مالتطبيقمثال 1الصناعيةالتطبيقات 2البعيدةاألماكناستكشاف 3الخطرة املهامتنفيذ 4واألمنية يةرالعسكالتطبيقات 5والترف التسليةعالمتطبيقاتيه
- 11. نشاط(2/2/6) مالتطبيقمثال 1الصناعيالتطبيقاتة ،والتشييدالبناء أعمال فيالروبوتبِّيجنويطلي ،املعادن يلحم فهو،الصعبة األشغال العمالفي،الهياكل وين،والحوائطضياتراأل وبعضالخرسانةيويسو،البناء دعائم ويجمعويفكالشاهقة؛ تفاعاتراالموادقل امل شبكات في ،واملياهالصحيالصرفأنابيبد ِّويمد ،املاءتحت ويحفر،األنفاقويشق،البناءافقر.الروبوتاتومن نفقتهاوقلة جودتها تفاعربا واستمت ، ً واسعا ً قبوال القتالتي،املساكنئ ينش ما. 2 األماكن استكشاف البعيدة الروبوتمثلاملائيال من لفحصهااألنابيب فيوالولوجاملائي املسح منويتمكنالتحكمذاتيداخل. 3الخطرةاملهامتنفيذ ضحايا عنللبحث مشتعلمبنىأو معلومات لجمعنشط بركان لدخو علىالقادرالروبوت. اإلنسانسالمة على ً حفاظااملذاباملعدن معبالتعامليقوماعرالذ ذوالروبوت. 4 العسكرالتطبيقاتية واألمنية .وهوالشرطيالروبوتاألشعوضوءوخلفيةأماميةاتربكامي مزودبعد عنفيهالتحكم يتمروبوتتحت ة للخ شرطةضابط حياة تعريض ندو أماكنهم علىوالعثور املجرمين عنللبحث صوتومكبراءرالحمطر. 5 التس عالمتطبيقاتلية والترفيه -غيابك فييمثلكبوتر -ومتابعة واألخبارالقصص اءةروقاملواعيد وتنظيمالتنظيف في يساهموالذياملنزليالروبوتوغيرها األطفال
- 12. 8دقائق جماعي نشاط(2/2/6) العلميةاملادةبالنشاط املرتبطة مالكتابالصفحات 1يثانو لاألو–الوحدةالثالثة129 تمرين يعزيزكراملشا: بعدقراءتكلتطبيقاتبوتوالرفيالعالم،الحقيقيدتروايجابياتوسلبياتاستخدامبوتوالرضمنالتطبيقات الصناعية.نبالتعاومعأفرادمجموعتكنفذالتالي: 1-أيمنهذهاإليجابياتوالسلبياتيمكنتعميمهاعلىبقيةاملجاالت؟ 2-هليمكناضافةإيجابياتوسلبياتىأخرالستخدامبوتوالرفيكافةاملجاالت. اإليجابياتسلبيات
- 13. نشاط(2/2/6) اإليجابياتالسلبيات الخطرة فوالظر فيالعملالتأسيسية التكلفة تفاعرا حودة ىمستو ثباتالعملأعلىاترخبإلىالحاجة للعمل أقصرإنجازعدمالتفكيرعلى ةرالقد البرمجة فيوسهولة نةومراملشاعر إنعدامواألحاسيس السلبياتواإليجابياتالتييمكنتعميمها
- 15. نشاط(3/2/6) حةواملطرللتساؤالتأجوبةعدةعلىلللحصواألفكارةراستثاهوالنشاطهذا منالهدف.خ أوصحيحجواب يوجدوالاطئ 100.%األجوبةأفضل يليوفيما(للصوابأقربها)حةواملطرللتساؤالت. لالتساؤجوابأفضل 1هليمكنللروبوتأننيكوأذكىمن اإلنسان؟ نعم.إذاكانالقصدمنالذكاءاتخاذأفضلاترارالقبناءعلىاملعلوماتاملتاحة.والدليلعلىذلكتمكنالعلماءمن بناءحاسبوتطويرالبرنامجفيهالذيأمكنههزيمةبطلالعالمفيلعبةالشطرنج.وتعتبرهذهاللعبةأحدمقاييس الذكاءبيناإلنسانواآللة. 2هليمكنللروبوتأنيكتسباملشاعر واألحاسيس؟ ال.وسببذلكأنالعلماءلميدركوابعدكنهاملشاعرواألحاسيسوكيفنتتكوفي،البشرواملجالمازاليخضع اساترللدواألبحاث.لذايصعبفياملستقبلالقريببرمجةاآللةلكيتكتسباملشاعرواألحاسيس. 3هليمكنللروبوتاتأنتتسببفيبطالة البشر؟ نعم.وقدتسبباستخدامالروبوتالصناعيفيخطوطتجميعاترالسيافياالستغناءعناآلالفمنالعاملينفيهذه املصانع. 4هييمكنفياملستقبلأنتتحكمالروبوتات فيحياة،البشروماالذييجبفعلهحتىال يحدثهذااألمر نعم.وذلكبسببزيادةاعتماداإلنسانعلىالتقنيةفيتسييرمختلفجوانبحياته.ومناملهمهنامراعاةالجوانب اإلنسانيةواألخالقيةعندتوظيفالتقنيةفيجوانب،الحياةفبدونهماتصبحالحياةأكثر ً تعقيدا. ولنأخذعلىسبيلاملثالجهازالكشفعناملعادنواألسلحةفياتراملطاالذييعبرخاللهجميعاملسافرين.ولنتخيل أنتقومدولةغربيةببرمجةهذهالجهازنليكوأكثرحساسيةعندمايدخلهمسافرمنجنسيةمعينةأومنلأصو ،معينةفيحيننيكوأقلحساسيةعندمايدخلهمسافرمنالجنسياتالغربية.وهنافإننانمكناآللةمنالتحكمفي حياةاإلنسانمعتغذيةاآللةبمعاييرمبنيةعلىالعنصرية. 5هليمكنللروبوتأنيصبح ً عدواللبشر؟إنالروبوتآلةيتحكمفيهامنيصنعهاويتحكمفيبرمجتها.والبشرهمأعداءلبعضهمالبعضبحسبوالءاتهم وانتماءاتهم.لذافإناإلجابةهي:،نعميمكنللروبوتأننيكو ً عدوالفئةمنالبشرإذاكانيتحكمفيالروبوتمنهم أعداءهذهالفئةمنالبشر. 6هلتتوقعأنهتوجدحياةمتقدمةعلى كواكبىأخريمكنهاتصنيعروبوتاتمحاربة وترسلهالغزواألرض؟ لميتمكنالعلمحتىاآلنمناثباتوجودحياةعلىكواكبىأخر.ولكناليوجدفيعقيدتنااالسالميةمايمنعذلك. واآليةالكريمةلتقو:(..ويخلقماالنتعلمو).وقدنيكوهناكإشارةفيهذهاآليةإلىاحتمالوجودحياةعلىكواكب ىأخرفينالكو.
- 16. 10دقائق جماعي نشاط(4/2/6) تمرين يعزيزكراملشا: وفقالتصنيفاليابانيبوتوللرالذيوضعتهالجمعيةاليابانيةبوتاتوللر،الصناعيةعزتتوبوالروتاتالىستفئات. نبالتعاومعأفرادمجموعتكصلةرالعبافيالعمودلاألوبمايناسبهافيالعمودالثاني م الروبوت نوعاملصطلحالعمل آلية 1 يدويا بهيتحكم1Intelligent Robot1وفق وتنفذالحاسبجهاز فيضمن ُ ت والعملياتالخطوات جميعتتابع مطلوب 2 التتابع محددةعمليات ينفذ2Numerical Control Robot 2إع عندتعلمهاالتيالخطوات وينفذبالخطواتويحتفظيسجلادة التشغيل 3التتابمتغيرةعمليات ينفذع3Playback Robot3يبشرمشغلبواسطةوتحريكهتشغيلهيتم 4 متعلمروبوت4Manual Control Devices4تصلتعديلالحاجة ندوتغييرهاويمكن متتالية عملياتينفذميم الروبوت. 5رقميبتحكمربوت5Fixed Sequence Robot5ابيئةفياملتغيرة الظروف مع ً متكيفا املطلوبالعملينجزلعمل 6 ذكيربوت6Variable Sequence Robot 6اتصميمبتعديلإالتغييرهايمكنال متتاليةعمليات ينفذلروبوت. العلميةاملادةبالنشاط املرتبطة مالكتابالصفحات 1لاألويثانو–الثالثة الوحدة133-134
- 17. نشاط(4/2/6) 143432 256521 364615 م الروبوت نوعاملصطلحالعمل آلية 1 يدويا بهيتحكم1Intelligent Robot1وفق وتنفذالحاسبجهاز فيضمن ُ ت والعملياتالخطوات جميعتتابع مطلوب 2 التتابع محددةعمليات ينفذ2Numerical Control Robot 2إع عندتعلمهاالتيالخطوات وينفذبالخطواتويحتفظيسجلادة التشغيل 3التتابمتغيرةعمليات ينفذع3Playback Robot3يبشرمشغلبواسطةوتحريكهتشغيلهيتم 4 متعلمروبوت4Manual Control Devices4تصلتعديلالحاجة ندوتغييرهاويمكن متتالية عملياتينفذميم الروبوت. 5رقميبتحكمربوت5Fixed Sequence Robot5ابيئة فياملتغيرة الظروف مع ً متكيفا املطلوبالعملينجزلعمل 6 ذكيربوت6Variable Sequence Robot 6اتصميمبتعديلإالتغييرهايمكنال متتاليةعمليات ينفذلروبوت.
- 18. بوتاتوالر تصنيف (وفقبوتاتوللراليابانيةالجمعيةالصناعية) •الفئة1: ً يدويا بها يتحكم أجهزة(Manual handling devices).منمتعددة جاتربد الجهاز ويتمتع يبشر مشغل بواسطة وتحريكه تشغيله يتم ولكن ،الحركة حرية. •الفئة2:التتابعمحددة عملياتلتنفيذ بوتور(Fixed sequence robot).بتنفيذ هنا الجهاز ويقوم الجهاز تكوين من ً جزءا نتكو عمل خطة أو تتابع وفق متتالية عمليات.ت الفئةهذه ضمن ويصعبيقوم ماغيير بوتوالر وبنية تصميم تعديل خاللمن إال بوتوالر به. •الفئة3:التتابعمتغيرة عملياتلتنفيذ بوتور(Variable sequence robot).بتنفيذ الجهاز ويقوم ا بعض بذل بعد العمل خطة أوالتتابعتغيير إمكانية مع عمل خطة أوتتابع وفق متتالية عملياتندو لجهد بوتوالر وبنية تصميم تعديل إلى الحاجة. •الفئة4:املتعلم بوتوالر(Playback robot).حالتين فينيكو أن هنا بوتوللر ويمكن:التعلم حالة التنفيذ إعادة وحالة ،والتسجيل. •الفئة5: ً قميار به التحكميتم بوتور(Numerical control robot).ضمن الحديثة بوتاتوالر وجميع الحاسب بواسطة بها التحكم يتم الفئةهذه(Computer controlled robot). •الفئة6:الذكي بوتوالر(Intelligent robot).يتم التي بوتاتوالرمن رمتطوىمستو هي الفئة وهذه الحاسب بواسطة بها التحكم.املحيط البيئة فهم على ةرباملقد الفئة هذه في بوتوالر ويتمتعإنجاز ثم ومن ،به ة العمل بيئة في املتغيرة فوالظرمع التكيف مع منه املطلوب العمل.
- 20. بوتوالر في اليد لقبضات نماذج
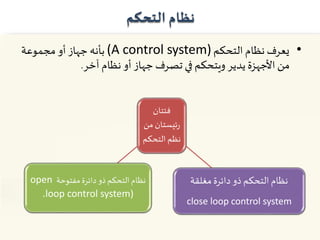
- 21. التحكم نظام •التحكم نظام يعرف(A control system)مجموعة أو جهاز بأنه آخر نظام أو جهاز تصرف في ويتحكم يدير األجهزة من. فئتان م ئيستانرن التحك نظمم مفتوحة دائرةذو التحكم نظامopen loop control system)، مغلقة دائرة ذو التحكم نظام close loop control system
- 22. مفتوحة دائرة ذو التحكم نظام نت املفتوحة الدائرة ذي التحكم نظام في التحكم عملية تحدثتغير يجة فقط النظاممدخالت. مفتوحةدائرة ذي التحكم لنظم أمثلة: •الكهربائيةحةوباملر التهوية نظام •الكهربائيةاملكنسة
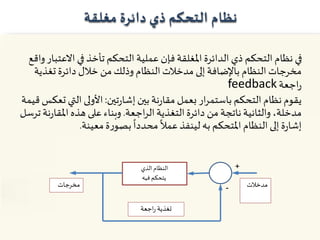
- 23. نظاممغلقة دائرة ذي التحكم االع في تأخذ التحكم عملية فإناملغلقةالدائرة ذي التحكم نظام فيواقعتبار تغذ دائرة خالل منوذلك النظاممدخالت إلىباإلضافة النظام مخرجاتية اجعةرfeedback تينرإشابيننةرمقا بعمل اررباستم التحكمنظاميقوم:الت األولىقيمةتعكس ي اجعةرالالتغذيةدائرة من ناتجةوالثانية ،مدخلة.املقاهذه علىوبناءترسلنةر معينةةربصو ً محددا ً عماللينفذبه املتحكمالنظام إلىةرإشا. الذيالنظام فيهيتحكم مدخالتمخرجات اجعةر تغذية + -
- 24. مغلقة دائرة ذي التحكم لنظام أمثلة •التكييفنظم •الخإلىي ضراأل انزالخمناملاء لرفعاآلليةاملضخةانز يالعلو •اآلليالطيار •بوتاتوالر •.....
- 25. 10دقائق جماعي نشاط(5/2/6) تمرين يعزيزكراملشا: يدخلنظامالتحكمبشكلواسعفيمكوناتبوتوالر. نبالتعاومعأفرادمجموعتكأذكرأمثلةلنظامالتحكم(سواءمنفئةالدائرةاملفتوحةأوالدائرةاملغلقة)والتيتدخل فيتركيبعناصرمكوناتبوتوالروفقلالجدوالتالي: العلميةاملادةبالنشاط املرتبطة مالكتابالصفحات 1لاألويثانو–الثالثة الوحدة134-136 الروبوت مكوناتعنصرمفتوحة دائرةذيالتحكم نظام نماذجمغلقة دائرةذيالتحكم نظام نماذج الرؤية نظام(اترالكامي) االستشعار نظام(الحساسات) أو الحركة نظاماألقدام اعرالذ قبضةاليد
- 26. نشاط(5/2/6) مكونات عنصر الروبوت مفتوحة دائرة ذي التحكم نظام نماذجمغلقة دائرة ذي التحكم نظام نماذج اةااااااااااااااااااااااااااااااااايالرؤ اامااااااااااااااااااااااااااااااااظن (اترالكامي) الضوئية اربالكامي صور التقاط يةرارالح اربالكامي صور التقاط فيديو تسجيل يء شإلى املسافة قياس(السونار). اماظن ادةاعاناماادةاعناواكتت اااهفإن ،اةاقمغلارةائداذياتحكمالا ااماظن ااذجاملن ابةاسبالناةايفرع لها أمثلة يلي وفيما ،البعض بعضها مع عملها في تتكامل: .1في اليمينإلى فتحة لأو إلى انربجد املحاط املسارفي األمام الى السيرثم،الجدار الفتحة هذهفي لالدخو-املتاهة في الروبوت حركةفي كما( .الحركة نظام+نظام املسارجدار في الفتحة وجود الستشعار السونار.) .2السلم علىجةردالصعود( .الحركة نظام+ال موقع لتحديد اترالكامي نظامجةرد.) .3املظلة إطالق-مسافةإلى الفضائية املركبة لوصو عند اشوترالب2قفو كلم الكوكب سطح( .تفاعراال لقياس االستشعار نظام+ا إلطالقاعرالذ نظامملظلة.) .4اترالسيا تجميعخط في مكانهافي وتركيبها فعهاروالعجلة لتناو( .نظاعرالذ ام+ اليد قبضة+اترالكامي نظام+االستشعار نظام.) .5و،محددة وسرعة،محددتفاعرافي الطائرة انرطي علىاآللي الطيار محافظةاتجاه محدد( .الفيزيائية القيم مختلف لقياس االستشعار نظم+لعةراألذ نظمفي لتحكم وغيرها ،البنزين ومضخات ومحركات أجنحة من الطائرة مكونات مختلف) االستشعار نظام (الحساسات) ةرارالح جةردقياس. السرعة قياس. الضغط قياس. تفاعراال قياس. أوالحركة نظام األقدام الخطوات من محددعدد تنفيذ. مبرمجة حركات عدة أو حركة تنفيذ (مثل محددة واتجاهات بمسافات السلحفاة حركة.) اعرالذمبرمجة حركات عدة أو حركة تنفيذ قبضةاليدمبرمجة حركات عدةأو حركة تنفيذ
- 28. 20دقيقة فردي نشاط(5/2/6) ذاتي يبرتد يعزيزكراملشا منخاللمتابعةالبيانالعمليمعبراملدقمبالتالي: •تثبيتلغةالبرمجةPython •سمرمستطيلبحيثنيكوكلخطينيينزمتوالهمانفسالسمك. •سمر6دوائرمتداخلةكلدائرةنبلومختلف العلميةاملادةبالنشاط املرتبطة مالكتابالصفحات 1لاألويثانو–الثالثة الوحدةالباي لبرنامج العملية يباترالتدنثو
Editor's Notes
- #8: مسابقة فيرست ليجو العالمية تعتبر مسابقة فيرست ليجو العالمية للروبوت واحدة من أشهر المسابقات العلمية لطلبة المدارس من الاعمار 9- 16 سنة ، وتقام المسابقة عالمياً منذ العام 1998 ولغاية الآن. وقد وصل عدد البلدان المشاركة في المسابقة إلى 42 بلد وشارك في المسابقة عام 2008 أكثر من 120 ألف طالب وطالبة من مختلف أنحاء العالم. ويمكن زيارة الموقع التالي للمزيد من المعلومات عن المسابقة العالمية والمشاركين www.usfirst.org - www.firstlegoleague.org تقام بشكل سنوي على نطاق عالمي بحيث تتنافس الفرق على تركيب وبرمجة الروبوت للقيام بمهام معينه داخل مضمار تحدد سابقا من قبل الشركة الأم , وتكون هذه المهام عادة في صلب موضوع المسابقة الذي يتغير بشكل سنوي. مسابقة فيكس وتعطي مسابقة فيكس(vex) الطلبة القدرة على اختبار جوانب هندسية وميكانيكية متقدمة في إطار تعليمي يعتمد على مبدأ(STEM) في التعليم والذي يعتمد عرض ( العلوم – التكنولوجيا- الهندسة والرياضيات) لإي إطار علمي يربطه بفروع العلم الحديث وتطبيقاته مسابقة بايلويد تحتل روبوت Bioloid المركز الأول في العالم في نوعية الربوتات المفصلية: كما يتم استخدام Bioloid التعليمي في أكثر من 200 مدرسة و300 معاهد الأكاديمية في كوريا – أمريكا – أوروبا – أمريكا اللاتينية – وتم توزيعه واستخدامه في التعليم في أكثر من 150 بلدا في العالم. Bioloid يمثل طقم الروبوت التي تساعد تفعيل حلم بناء الروبوت لآلاف من المشجعين الروبوت الروبوت المعتمد في الأوليمبياد السعودية من وزارة التربية والتعليم Bioloid : هو روبوت مفصلي أي يعتمد في حركته على حركة مفصلية تحاكي حركة الكائن الحي ويتميز بوجود 18 محرك يمكنك أن توظفها في عمل حركة مفصلية للعديد من الكائنات الحية .. أيضا يتميز Bioloid بوجود العديد من الحساسات المتنوعة بالإضافة لأداة للتحريك عن بعد. كيف يمكن برمجة Bioloid ؟ RoboPlus هو برنامج يقوم على اساس الرموز وتم بناءه على اساس لغة C البرمجية، وتم إعداده ليكون سهل الاستخدام ومناسب لإعداد البرمجيات للمستخدمين الذين لا يتقنون البرمجة بلغات الكمبيوتر. ويمكن برمجتها لعرض الاقتراحات والسلوكيات التي يطبقها الروبوتات وإدارتها مع البرنامج. يمكن للمستخدمين معرفة هيكل وقواعد البرمجة بلغة C في نهاية المطاف أثناء استخدام RoboPlus. وبالإضافة إلى ذلك، يتم تقديم برنامج اللغة أمثلة مختلفة للخبراءفي البرمجة بلغة
- #12: روبوت «إفا 500" يمثلك في غيابك عن العمل هناك الكثير من الروبوتات المتواجدة في الأسواق للعمل عن بعد، ولكن هدف روبوت «إفا 500" الجديد، الذي يتميز باستقلاليته التامة، يمكنه معرفة المواعيد والتدخل وقتها لتنبيهك الروبوت الجديد إفا 500، مثل روبوتات تنظيف المنزل؛ حيث يسير ويتحرك عن بعد لعقد أي مؤتمرات مع أي أشخاص آخرين والتحدث معهم من خلال شاشة 21.5 بوصة وكأنك معهم، الروبوت الجديد يمكن استغلاله ككاميرا متحركة لمراقبة العمل من المتوقع أن تبلغ قيمة الإيجار الشهري لـ"الروبوت" شهريا 4 آلاف دولار، ويتضمن منصة "سيسكو" للتواجد عن بعد.